让自动驾驶汽车注意路况、看懂交通标志、检测对象并为其分类、感知速度/轨迹以及其他车辆并不容易——更重要的是,它必须能自行在地图上定位,才能确切地知道驾驶的目的地。
高度自动化的车辆在追踪周围环境时,必须依靠很多传感器,包括摄像头、雷达、超声波、GPS天线,以及利用光脉冲测距的光达(Lidar)组件。每一种传感器都有其优缺点。
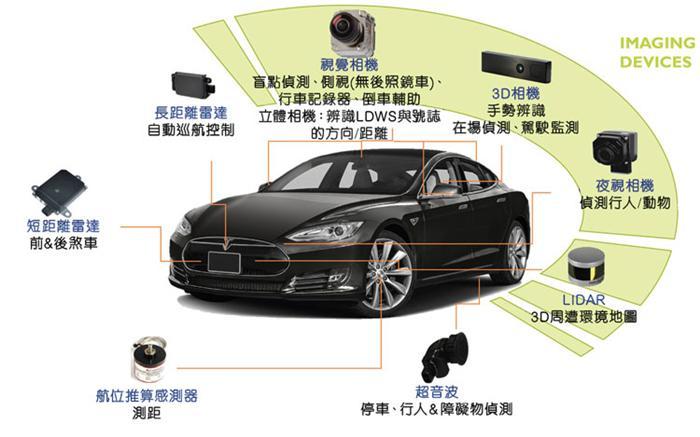
图1:安装在车辆上的一系列传感器技术(来源:Yole Développement)
视觉摄像头 盲点检测、侧视(无后照镜车)、行车记录仪、倒车辅助 立体摄像头:识别LDWS与标志的方向/距离 3D摄像头 手势识别 现场检测、驾驶监测 夜视摄像头 检测行人/动物 LIDAR 3D周围地图 超声波 停车、行人&障碍物检测 航位推算传感器 测距 短距离雷达 前&后煞车 长距离雷达 自动巡航控制
我们首先应弄清楚如何最有效地填补传感器固有的缺陷。第二步可能更为重要,即开发最佳策略,将不同的数据流结合起来,使关键信息不至于遗失。每一种传感器都以自身的画面更新速率传送数据已经是个问题,传感器融合就更复杂了——因为有些传感器提供原始数据,而其他传感器则提供自己的对象数据答案。
2017年,我们看到了感知技术方面的一连串进展。VSI Labs创办人兼负责人Phil Magney表示:“感知是自动驾驶汽车(AV)软件堆栈的一个主要领域,而且在这方面还有很多创新。”
科技公司、一级供货商和OEM一直急于取得自家公司缺乏或无法自主开发的传感器技术。同时,过去两年来已经出现了多家感知传感器新创公司,其中有许多都关注尚处于萌芽阶段的自动驾驶汽车市场。
英特尔收购Mobileye
2017年汽车行业最大的收购交易是英特尔(Intel)以153亿美元买下Mobileye。
由于Mobileye已经在高级驾驶辅助系统(ADAS)和自动驾驶汽车的汽车视觉领域占据明显的领先地位,收购Mobileye之举使得英特尔在自动驾驶汽车竞赛中稳居有利地位。
尤其是考虑到视觉是自动驾驶汽车中唯一不可或缺的传感器技术,这项收购案显得更重要。英特尔表示打算将Mobileye的“计算机视觉、传感、融合、地图建构和驾驶策略”与英特尔的“开放计算平台”相结合。
Magney将摄像头形容为“必备的传感器”,他解释说,具有以高分辨率采集图像的能力,才能让摄像头更有效地分类对象。现在的摄像头还支持彩色显示。那么弱点呢?Magney补充说:“摄像头的深度不如光达。”
光达:最热门的领域
在所有的传感器技术中,光达是2017年交易量最大的市场。IHS Markit的汽车电子和半导体资深分析师Akhilesh Kona列举去年的收购案,如福特(Ford)收购了Princeton Lightwave、通用汽车(General Motors;GM)收购光达公司Strobe,以及Continental买下Advanced Scientific Concepts (ASC)的光达业务。
Magney则称光达“仍然是最热门的领域”,部分原因是光达在自动驾驶中有相当多用途。他解释,“高度自动化的车辆需要一个具有定位资产的基本地图,对此没有任何东西能够取代光达。这是高端产品得以竞争之处。”
光达市场之所以如此热门也由于新的激光技术出现。据Kona表示,一种波长高于1,400nm的新雷射发射技术正兴起中。这种新的波长可望为光达带来更高分辨率和更远射程。他补充说,Princeton Lightwave、Continental 和Luminar Technologies三家公司都在开发这种新的激光技术。

图2:不同类型的光达技术比较(来源:IHS Markit)
同时,供货商也通过开发各种光束控制技术,不断改善光达的耐用性、尺寸和成本。这些技术既有机械式也有MEMS和固态光达。
据Magney介绍,机械式光达(如Velodyne 128信道的产品)由于能产生360度点云,非常适合建构地图。但是,对于部署量产车辆,基于固态组件——MEMS或光相位矩阵(OPA)的光达非常适合,它们也可以在其视野内产生点云。
成本更低的闪存(flash)组件也开始崛起。Magney指出,有些被设计成距离探测器,且成本低于100美元,但缺点是分辨率有限,无法对对象进行分类。
毫米波雷达
当光达大步前进时,雷达也并未停下脚步。继恩智浦半导体(NXP Semiconductors)在2016年首次推出采用CMOS工艺技术的77GHz微型雷达芯片后,德州仪器(Texas Instruments;TI)也在去年进军毫米波(mmWave)雷达市场。该公司宣称如今拥有最小尺寸的CMOS传感器产品组合。
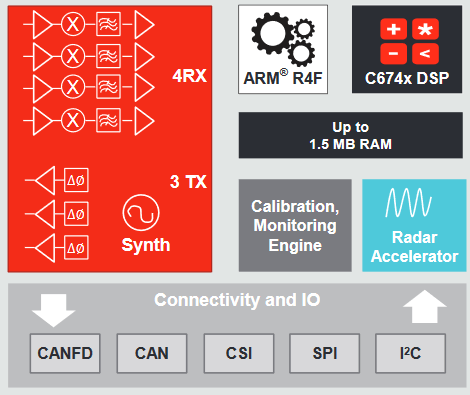
TI汽车毫米波雷达传感器整合RF与模拟功能以及数字控制于单一芯片中(来源:TI)
在雷达市场,竞争的重点在于尺寸和精确度。TI如今宣称可支持“小于4cm测距分辨率的高精度独立传感技术”。
Magney表示:“我们对雷达的进展感到满意。毫米波雷达正热。”他评论道:“雷达的分辨率越来越高,现在已能用于分类物体,这是以前做不到的。”
然而,更好的分辨率需要更多信道,这意味着有更多数据需要处理。所以,Magney说:“毫米波雷达需要有专门的处理器来处理这些数据,以及产生对象或点云。”此外,毫米波雷达还需要开发工具以打造应用。否则,庞大的资料难以被理解。
雷达除了能全天候工作外,其他的评价一向不优。传统的车用雷达无法看到摄像头或光达所能看到的物体。更具体地说,雷达看不到远方的物体,也无法区别所看到的东西。它们的处理速度不足以达到行驶于高速公路的要求。
模拟波束成形
2017年1月成立的新创公司Metawave期望通过其开发的模拟波束成形技术来改变现况。
Metawave采用PARC将超材料、雷达和天线商业化的独家授权,在今年的CES展上推出该公司“完整雷达套件”的原型。该公司的超材料是布署在PCB上的小型软件控制工程结构。这些结构据称能以特殊的方式控制电磁波束,这在以前通常只有在更大尺寸、更强大和成本更高的军用系统中才能实现。
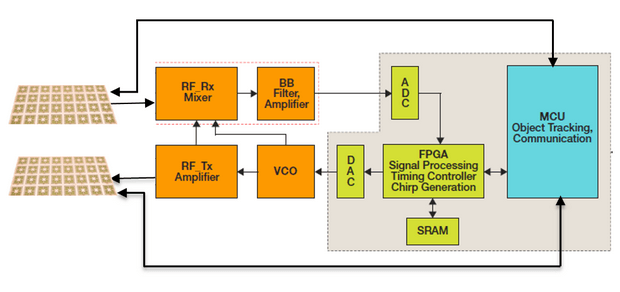
Metawave的模拟雷达技术基于电子可控天线,使用一根双端口的天线:其中一个埠连接到Tx或Rx链路,另一个埠连接到MCU。MCU透过查找表(LUT)定义和控制天线的波束宽度和方向,从而使Metawave的模拟雷达实现微秒级速度的扫描(来源:Metawave)
Metawave的雷达套件型兼容于各种雷达芯片。该公司宣称其基于超材料的模拟波束成形技术能精确地控制雷达波束,在不牺牲分辨率的情况下提升工作速度和SNR。
机器用成像数据
尽管Mobileye目前仍是汽车视觉领域的领导厂商,Magney认为其他公司也正迎头赶上。他说:“任何人都可以获得相同的成像器,打造适合于图像识别的摄像头。但问题是你需要合适的处理器,以及紧密整合的算法。”
然而,“如今你可以从几家芯片公司中选择一款高性能视觉处理器,并套用自家的算法。或者,你可以用卷积神经网络(CNN)来完成这项任务。”Magney总结道:“目前,自动驾驶汽车制造商已经在摄像头方面作了选择。许多公司会将人工智能(AI)应用于图像中以取得结果。”
然后是总部位于巴黎的新创公司Chronocam。该公司的传感器技术并非针对人类应用,而是为机器感知和检测而打造的。Chronocam这款以事件为导向的传感器技术还很新,尚未用于任何商用车,但已经受到业界关注了;该公司期望该技术能彻底改变当今CMOS图像传感器市场。例如,雷诺集团(Groupe Renault)于2016年底与Chronocam达成了战略发展协议。
正如Chronocam首席执行官所指,英特尔、英伟达(Nvidia)等GPU/CPU巨擘仍在试着找出更准确、更快速处理大量数据的最佳方式。然而,Chronocam专注的是为机器应用简化和量身打造的成像数据采集。事件导向的传感器目标在于显著减少数据负载,使车辆几乎可以做出实时决策。
定位
让汽车具有“自我意识”的第一步是建构地图,并实时匹配至车辆在预先制作的地图上看到的内容。然后,车辆可以对其位置进行三角测量和定位。Magney强调:“车子必须确切知道要去哪里,才能发展出‘情境感知’。”
换句话说,如果希望高度自动化的车辆能准确定位,就需要使用光达。Magney指出,它们需要一个具有定位功能的基本地图。
不过,还有其他方法可以做到这一点。例如Nvidia DriveWorks SDK可实现基于图像的定位。DriveWorks工具库包括地图定位、HD地图接口以及自我运动(egomotion)等。
实时动态定位(RTK)是另一种选择,Magney补充说。RTK可增强来自全球导航卫星系统(如GPS、GLONASS、Galileo和北斗)的位置数据精确度。Magney说:“在一般情况下可能运气不错,但在城市地区,由于RTK需要高度依赖卫星,可能无法有效发挥作用。”
同时,英特尔/Mobileye正推广其用于定位的道路体验管理(REM)技术。Mobileye希望利用基于摄像头的ADAS系统普遍性,发挥群体力量实时建立并维护一个精确的环境地图。
新创公司在定位方面也有发挥的空间。据悉,DeepMap正致力于L4/L5级自动驾驶汽车解决HD地图建构和定位,以及大数据管理方面的挑战。Magney指出,DeepMap使用摄像头图像和光达数据,有效地改善了目前的数字地图。他补充说,该公司计划推出的是一项服务,而不只是一款产品。
传感器融合
随着自动驾驶汽车收集到所有的传感数据,最重要的就是传感器融合的质量。传感器融合的结果决定了自动驾驶汽车的决策和行为,也即安全问题。
自动驾驶汽车无法仅靠一个传感器实现安全驾驶,因此必须进行传感器融合。但Magney补充说:“因为你必须同步所有的传感器信号,所以融合是很困难的。”
至于是融合“对象”数据还是“原始”数据,业界对此的争论才刚刚开始,目前还没有明确的答案。
相较于对象数据,由于原始数据不会在转换过程中发生遗失,大数的AI拥护者较支持这种数据融合途径,Magney表示。但他补充说,与原始数据融合有关的问题包括:“你将需要大量的处理;你还需要有GB级的网络,才能将这些信号传送到整个车辆中。”
新创公司DeepScale开发了一种感知技术,能采集原始数据,而非对象数据,而且可以在嵌入式处理器上加速传感器融合。DeepScale现正利用其深度神经网络(DNN)从头开始做起——所使用的原始数据不仅来自图像传感器,还包括雷达和光达。
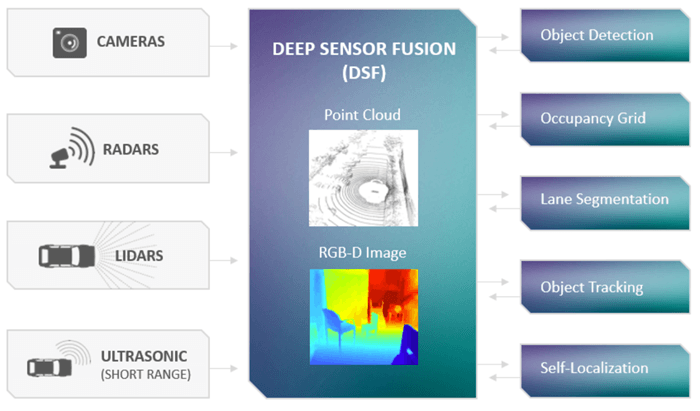
DeepScale开发可用于早期传感器融合的深度神经网络(来源:DeepSacle)
来源:盖世汽车
本文地址:https://www.d1ev.com/news/jishu/64498
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号