近日,微博上多名大V用户发文,称极氪车机出现BUG,在倒车的时候因为影像或雷达的延迟,导致撞车的。
更有甚者,因为车机的BUG,导致了3次撞车事故的发生。
而极氪官方的工作人员也在7月4日进行了回应,称车机BUG是小概率事件,技术人员已经意识到问题并且着手解决,也将与于月开始推送新的OTA升级。
这件事情,虽然导致的损失并不大,也就是一些轻微的车损,但是在微博上却闹得沸沸扬扬,不少数码大V和财经大V也纷纷转发微博……
在我看来,这样一起“车机BUG导致撞车”事件,也并没有大家想象得这么简单。
第一问:极氪的车机,真的有BUG吗?
通过事件亲历者的陈述,以及极氪品牌官方的回应,我们可以基本上可以确定,部分极氪车型的确存在车机系统的BUG,比如超声波雷达无法感应、倒车影像存在延迟的情况。
至于导致这种BUG的原因,我也咨询了相关的汽修从业者。
他们表示,出现这种情况的原因比较多,排查起来也比较复杂。
智能车机上出现这个问题比较常见的原因是系统卡顿,可以理解成车机系统无法迅速处理倒车摄像头和雷达的信号,在显示端出现了延迟。
一定程度上而言,通过算法逻辑的优化,可以在软件层面进行解决。
而另外可能的原因,就是硬件出现了问题。
比如信号传输线路出现了虚接、接触不良的现象,从而导致雷达、摄像头失效的问题。
在目前,极氪官方并未公布BUG的出现原因。
但是从“OTA升级”等字眼来看,大概率是系统的卡顿,消费者只有等待OTA升级,并且观察是否还会出现问题。
第二问:这种BUG在智能时代是否会成为常态?
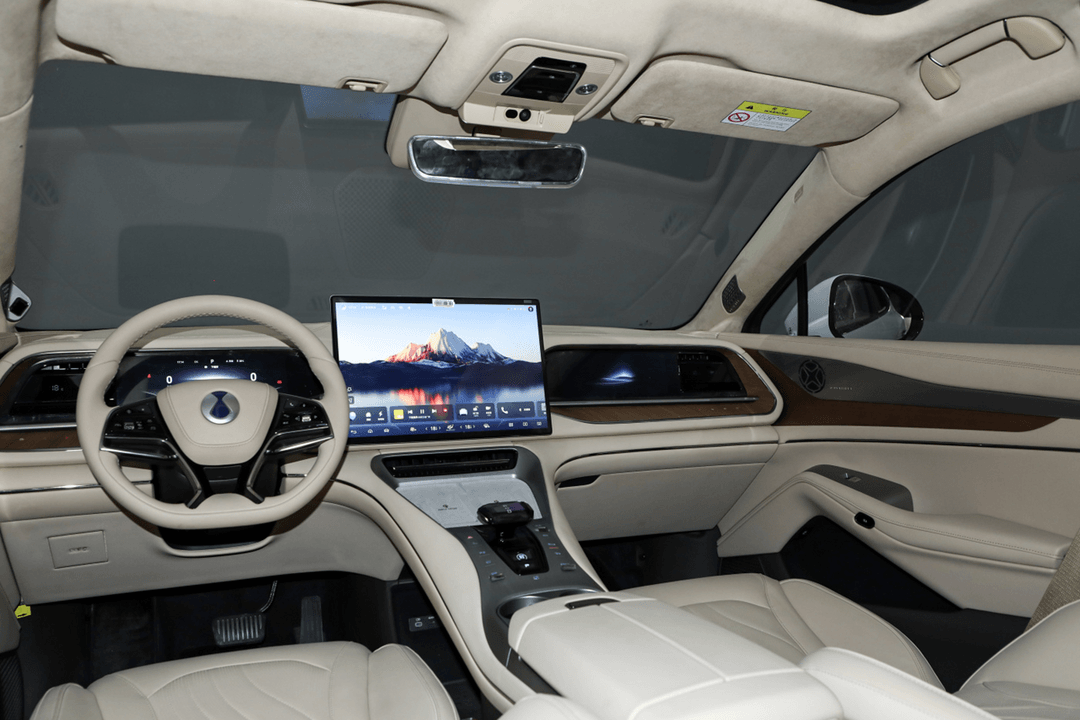
在目前,很多智能车型布满了传感器,540°全景影像和车辆周围的超声波雷达,能够实时反映车辆低速行驶时周围的状态。
而众多的感知元件,也要求车机系统有着更高效的处理能力。
如果算力达不到要求或者系统软件算法比较落后的话,就容易出现影像卡顿延迟、雷达失效等情况的发生。
所以从根本上来说,如果车辆车机系统的计算软硬件系统无法达到需求的话,极氪发生的BUG也可能出现在其他车型上。
因此,这也对车企在车机系统的开发工作中,提出了更高的要求。
第三问:影像延迟只有极氪有吗?
从这一次的微博事件来看,吐槽极氪车机BUG的多为数码博主。
其实,这些博主可能并不知道,倒车影像延迟,一直以来都是一个老大难问题。
我们公司的一个新同事最初拿驾照的时候,也过度依赖倒车影像。
也曾因为通过大屏幕观察后方环境来倒车而出现过因为速度快、延迟高导致的撞车事故。
后来才知道,汽车的倒车影像和雷达,最大的指标是满足复杂环境下的稳定性需求。比如要求在高温和极低温环境下,它们都能正常使用。
但是,因为信号传输、车机系统解码等过程存在一定的时间差,所以无可避免地会在屏幕上出现延迟。影像的延迟,普遍在0.1秒到0.5秒左右。
当然,如果是医用的影像设备比如飞利浦、蔡司等品牌的医用可视操作系统,它们的影像延迟就能缩小到毫秒级别。
至于这“车规级设备”和“医用设备”之间的成本差异,那可就大得离谱了。
所以,倒车影像有延迟这样的问题,大可不必过度解读。
是个车,就一定有发生这样问题的可能性。
第四问:过度依赖倒车影像行不行?
在目前,新能源汽车为了保证续航,需要更大的电池。而更大的电池,也让车辆越来越大、越来越宽,很多车动不动就是2米的宽度。
于是不少新手,在开车的时候因为车辆宽大、视线盲区比较大,都很依赖于车辆的全景影像和雷达。
但实际上,这种过度依赖影像雷达的驾驶方式,存在一定的危险性。
我曾经在开车时也遇到过这样的问题,自己的某款中型SUV,在倒车时也偶尔会出现影像延迟、卡顿的问题。此时更好的方案,还是通过车辆内外的3组后视镜来解决。
所以大家在开车的时候,还是要掌握车辆的空间感,并且通过后视镜来判断车辆周围的环境。
毕竟,传统的后视镜永远是最可靠的影响,而且无论如何也不会出现摄像头存在的延迟。
所以,车辆的倒车影像和雷达,只是给驾驶者提供一个参考。
比如在倒车的时候,可以用它来初步观察一下盲区内是否有障碍物,至于在倒车的过程中,还是要参考后视镜的实际影像。
第五问:新手该如何选车?
在燃油时代,新手往往喜欢选择高尔夫、福克斯或者POLO这样的小车。
这种小车体型小盲区小,即便是新手也能轻松穿越狭窄区域和停车;而雷克萨斯LS、宝马7系这样的大车,基本上都是老司机的专属,因为它们体型大、盲区大,开起来不够方便。
而现在的新能源车,都是越来越大、越来越宽,这也让很多新手少了一定的选择空间。
从车企的角度来说,各大企业也需要想办法打造出灵活、易于驾驶的精品小车;而对于新手消费者来说,大家也可以先从小车开始入门,在后期慢慢过渡到大车。
这样的车型过渡思路,也是老司机和驾校教练们比较认可的方式。
因为大多数开车的新手,对空间的把握都不是很好,如果贸然开大车的话,不仅影响道路的通行效率,而且也容易出现剐蹭等问题。
结束语
最后再重申一下我的观点:极氪出现车机BUG,固然是一个问题,这需要车企去着手优化、快速解决;但同时,对于消费者、驾驶员来说,大家在开车的时候,其实也不应该过度依赖于现代化的科技,比如影响雷达等等。在目前,汽车智能驾驶仍然处于探索阶段,大家需要新技术作为辅助,同时也需要自身的驾驶技术过硬来作为保障。
唯有这样,才能最完整地发挥出汽车智能新技术的先进性,同时兼顾道路环境的安全性。
来源:第一电动网
作者:二师兄玩车
本文地址:https://www.d1ev.com/kol/206039
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

















 京公网安备
11010502033163号
京公网安备
11010502033163号