当时间从分秒的拨动,走向日月的轮转,生活在同一片土地上的我们,终究结束了2023年的旅程,进入新一轮的公转周期。
时间不会停息,事物的发展显然也不会长久停滞不前。波澜壮阔的一年里,处在新能源汽车领域的我们迎来了各种各样的新事物冲击:激光雷达、城区智驾、800V、互联生态……
新能源汽车的科技树发展是如此迅速,有时快到令人目不暇接,但好在今年余下的闲暇时光里,我们还能为大家对这棵树上的明珠——整车智能化的「内」与「外」,对应着智能座舱和智能驾驶两大领域,去做些小小的总结和展望工作。
(本文节选自新出行 2024 中国新能源车年志)
聊到智能座舱,不可避免地,我们要和大家聊一些有关智能座舱的年度的热点词汇。而在其中值得与大家畅聊一番的,我们认为是以下三个词汇:8295、AI、生态互联。对于智能座舱而言,更强大的硬件能力,无疑是驱动各家软件团队更快开发软件能力的良药;对于 8295 而言,我们应该做的,是先循序渐进地为大家简要介绍一下。
作为座舱芯片,初了解智能化的你,可以将高通推出的骁龙8295芯片当做车辆在智能座舱的“大脑”;作为骁龙 8155 的接任者,8295 给予车辆智能座舱团队的,是更强大的智能座舱大脑和更激烈的竞争。
关于接任,事实上是因为现有的 8155 座舱芯片,即将到达到了开发的边际——8155 这块芯片的价格是越来越便宜的,我们如今能在 10 万元左右的车型上就能看到 8155 活跃的身影。
而在越来越多的软件定义加持后,8155 也逐渐到了需要寻找接任者的时候:车内屏幕的增加,核心中控屏幕呈现的内容增多,尤其是 AI 能力,比如今年引起热议的 AI 大模型。
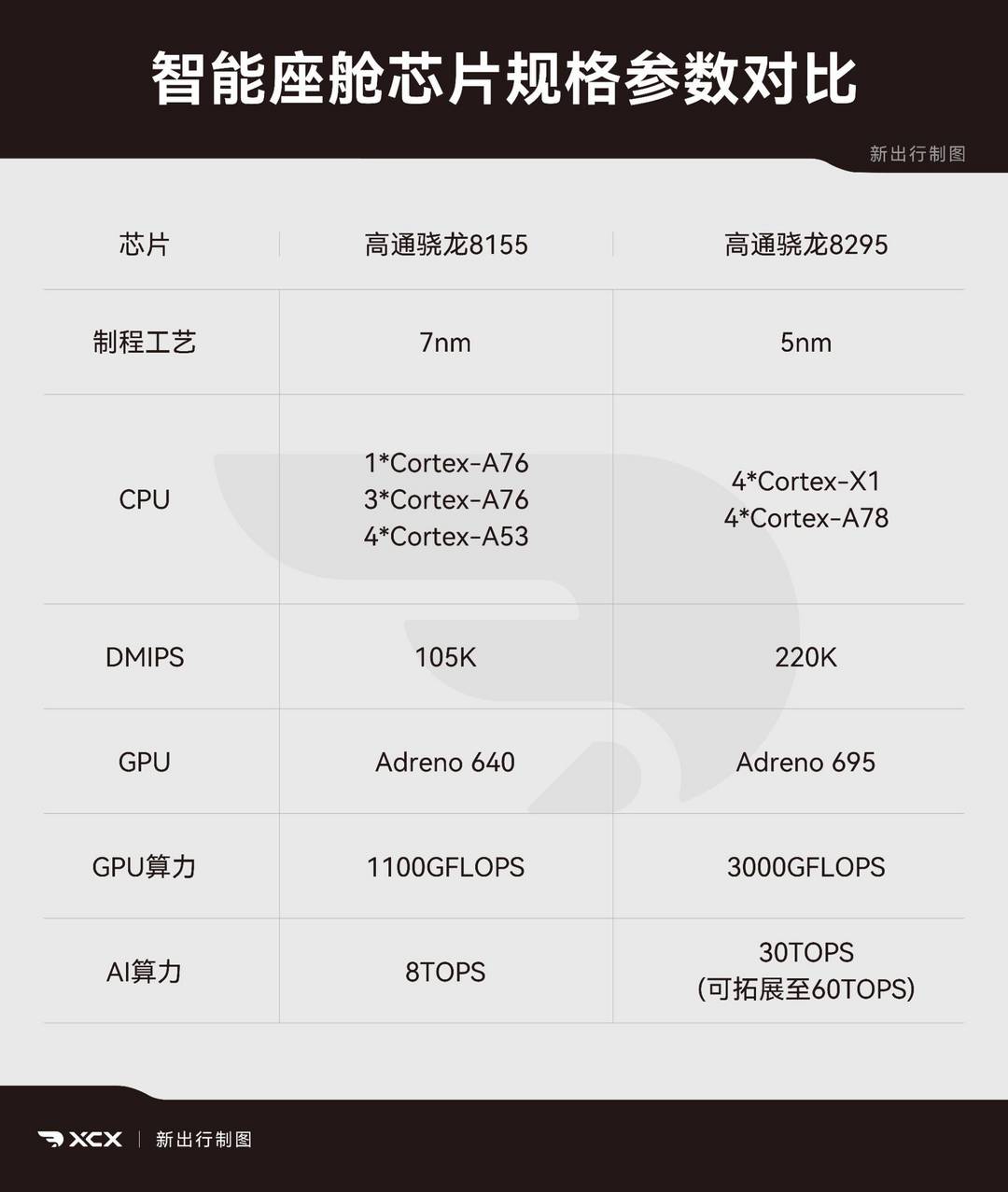
用直观的数值对比,现如今的 8155 芯片,普遍能查询的AI算力数据约在 8TOPS 上下,而 8295 芯片的 AI 算力在 30TOPS 甚至更高(如极越 01 上可拓展至 60TOPS );
而在 CPU 和 GPU 规格上,8295 虽然是 8155 的接任者,但从架构来看,8295 并不像 8155 般基于移动端的芯片改造而来,其核心规格更趋向于高通此前推出的桌面端芯片骁龙 8cx Gen3 ,性能相较 8155 而言有着成倍的提升。

伴随着更多内容的加入,智能座舱芯片势必要被吃掉更多的算力。因此为了内容更多而广的智能座舱生态,作为大脑的智能座舱芯片,升级换代成为了必然。
在 2024 年,8295 的使用与否,很大程度上决定了整车智能座舱的水平究竟如何。而对于消费者而言,衡量不同品牌,不同车型智能座舱的水平高低,配置表上的座舱芯片将会成为关键性因素——未来的 8395、8495(非官方代号)等更强算力的芯片出现后,也将重复 8295 代替 8155 的过程。
“车机就像是一个大 Pad(平板电脑)”,雷军在小米 SU7 的技术发布会上点明了这一点,智能座舱的发展,正如我们手中的平板电脑、手机等便携的智能终端,都会走向一致的发展路线。
而基于当下的时间线展望未来,在智能座舱的定义上,各个车企都将会从差异化逐渐转为趋同的方向,就像 iPhone 这么多年的演变一样。
进入车内,用户感知并与智能座舱交互的介质,在 95% 的时间里是中控的大屏,而以地图/ 3D 车控/壁纸为桌面叠加固定式底部 dock 栏的设计,已经是绝大多数采用 16:9,或趋近这个屏幕比例区间的屏幕所使用。
屏幕比例的趋势变革,意味着智能座舱团队会将更多的精力聚焦于横屏交互,而对于竖屏的规划预期必然会逐步降低。比如已经在 NT3.0 平台重明确将中控屏幕变为横屏的蔚来,和同样改变中控屏幕方向为横屏的哪吒 L 。两家一贯以竖屏为基础建立座舱交互的企都已纷纷做出改变。
另一方面,观影,音乐,游戏等娱乐功能被逐步添加进智能座舱的生态系统当中,这正是智车能手机当初的发展路线,同样也是推动屏幕横置的幕后推手。而智能座舱的生态有了参照物,跨越的速度只会更快。
AI 算力的提升,不仅仅是带来更多的新功能,我们日常所接触到的语音助手、车内人脸识别等同样会通过 AI 算力的提升而同步提升。
在 AI 大模型与更强的AI算力加持下的车内语音助手,无疑会走向更加拟人化的道路。AI 算力的提升不仅可以帮助语音助手减少识别语音上的误判导致的错误和无序回答,从而更好的理解用户话语中表达的实际语意,同时在免唤醒层面上也会有着更好的表现。
而在 AI 大模型上车后,用户与车内语音助手方面会有更多不止于车辆的互动,车内的语音助手能够接收除了车辆以外的指令,根据现实世界中的内容生成合适的回答。
对于新兴事物而言,我们要做的便是保持冷静,用审视的眼光进行欢迎。AI 大模型固然让智能座舱有了接触现实世界并进行反馈的能力,但在其中涉及到的法规问题、大模型训练能力(其中又涉及到计算量和模型数据等问题)、端云数据脱敏等…… AI 可以是贾维斯,也可以是奥创,这取决于车企在不断变化的政策环境下对于 AI 的态度。
在互联生态方面,我们最为熟知的便是车手,也就是中控车机与手机之间的互联——在之前,我们听过最多的是来自苹果的 CarPlay 和百度的 CarLife 。对于苹果用户来说,CarPlay 如同手机的延展,无论在操作逻辑和应用流转上,中控屏仿佛变成又一台 iPhone 。
但这一切的基础上,在于苹果的生态封闭性。这里所指的封闭并不是一个贬义词,事实上正是因为苹果的封闭生态,让苹果有着更多管理的权限,从源头上遏制一些不良应用和代码对于生态内设备的影响,保证设备与设备之间的体验一致性——这是互联生态中最为关键的。
在 2023 年,我们也能看到越来越多这种类封闭式的互联生态方向,比如华为所带来的 HarmonyOS 、魅族的 Flyme Auto 与小米的澎湃 OS。
它们三者的相同点在于都是由手机厂商提供的方案,对于手机厂商而言,做一套智能座舱的系统完全不用像车企一样从零开始——无论是华为、小米还是魅族,在智能座舱上的内容都是基于其自有生态的衍生产物,手机与车机之间的无缝流转,对于他们来说只是微小的一份工作。它们真正需要投入大量精力的,是思索如何将现有生态里的内容和设备一步一步填满智能座舱。
而相对华为/小米/魅族这类本身有着系统级生态概念的手机厂商布局车手互联,在 2023 年还出现了与这三位选手完全相反的例子——蔚来。作为汽车厂商,蔚来并未选择吉利与魅族般构建合作,而是选择自建生态,推出了 NIO Phone 作为蔚来用户与蔚来汽车之间联系的介质。
可能很多人都在嘲笑蔚来造手机的天马行空,但实际上对于生态建设而言,来自同一厂商提供的生态内容才能真正保证用户的体验——曾经横行一时的 CarPlay,现如今有越来越多的汽车厂商选择抛弃苹果,转而拥向与车机系统同源的安卓。其中有数据敏感的问题,也有 CarPlay 需要占据的车控接口问题,授权费用的问题……
总体而言,在可预见的未来里,CarPlay 的最好归宿,是在苹果汽车上;而互联生态会随着各家车企掌握更底层的接口,如自研芯片,自研操作系统等,走向更加封闭,也更加广阔的生态域当中。
用一个比较天马行空的比喻,在车辆智驾系统的眼中,城市就像是一团被调皮的猫咪扰乱的毛线球,而城市与城市之间相连的高速,则是不同毛线球之间的的拉扯纠缠。智驾系统要做的,便是一点一滴理清几十上百颗混乱的毛线球。
听到这想必大家便能大致理解,为何现在已经到了各家车企纷纷进军城区智驾的阶段——相较城区,推进难度要低许多的高速路段已经是一片坦途。拥有高速智驾能力的车型逐渐出现在十几万元的家用车上,如吉利银河 L7 和深蓝 S7,它们都有着低成本便能实现高速智驾的能力。
但在城区智驾上,一切都变得不一样了。面对更加复杂的道路情况,车企需要投入的人力和资源,会随着城区推进的速度和难度而成倍增加。最重要的,是消费者已经尝到了智驾初步成熟运用后的甜头。
城区智驾落地的意义,不仅仅在于给予用户的使用与体验,对于整体的智驾系统而言,都会随着城区开城而得到提升——随着开城数量的逐步增多,用于大模型训练的数据量也会成倍增加;智驾系统在城区的行车能力,伴随更多数据训练从而不断优化,而城区的各种复杂路况处理能力又能反哺车辆的高速智驾、基础的车道保持、泊车等能力提升。

而如何处理与应用,令接收数据到能力提升成为正循环,正取决于车企对于智驾领域的投入时间先后,投入人力与资源而决定,城区智驾的门槛也在由不断的数据训练和能力优化中高高叠起。
像小鹏、问界、蔚来、理想等大力投入并已经开始向用户大批量推送城区的先行者,在 2024 年会随着更多用户所带来的能力积累,从而相对其他品牌更快扩大优势和强化竞争力。
基于结果论,在大部分人的视角中,正是因为车企宣扬的无图化能力,城区智驾的开城速度才会大大加快。而关于无图和有图,“图”是什么,我们可以先好好聊聊。
我们通常在智驾领域所谈及的无图化,去掉的图是指高精地图,此时迎来第一个思考:我们为什么要去掉高精地图?高精地图的存在与否对于智驾系统有怎样的影响产生?
高精地图自有三种特性,需要采图商具备资质、具备高精度、具备高频的更新率。当这三个属性单纯放在智能驾驶功能上,无疑非常好用。但产生去高精地图的智驾路线,并不是高精地图本身的问题。
我们需要知道的是,高精地图并不是快消品,它首先是一块地图,地图的性质便决定了其应该根据不同时期的道路变化,需要有不间断的周期性更新。所以当图商采集制作完成高精地图后,交付给车企仅是一个开端,而不是随着交易完成的产品周期结束——
无图化智驾路线的产生,并不全由图商-车企-用户三者之间环环紧扣的矛盾关系引起,有很大一部分原因在于大算力智驾芯片的运用,BEV 大模型网络和大计算平台的发展。
BEV 算法本质上并不是全新的技术,原理也不复杂。但在结合 Transformer 将传感器所收集到的现实世界图像信息特征化,此时车辆便脱离了以往代码直接规控车辆行驶的阶段,BEV+Transformer 可以为智驾系统构建出更趋近真实世界的 3D 空间网络。
而在 BEV+Transformer 的概念提出后,智驾系统在去高精地图上有了初步的思考和准备,此时道路地图的信息生成问题得到解决后,车企需要做的,是算法的优化,不同传感器之间的融合感知、如何更好的分配芯片算力等。
我们虽然有了更优秀的算法路线,但并不意味着无图化在任何时刻都是正确的“尚方宝剑”。事实上面对高速路段,在多数情况下并不会出现城区那般时常因为修路/改道/施工等发生的道路变化,也不用像城区般需要高更新频率。因此对于高速而言,高精地图又可以重新回到智驾系统的视野当中。
伴随着各家车企纷纷在城区脱离高精地图,利用无图化的强大泛化能力进行更快速的智驾开城操作时,新的思考接踵而至——无图化的边界在哪?
实际上无图化的能力边界触达,取决于其能否完整覆盖驾驶者从起点到终点的路线,保持全程无需驾驶者接管,也就是我们熟悉的又一个词汇——点到点。
所有智驾系统的核心目标,都是让用户实现点到点的智驾通行。在这其中包含有城市道路、高速道路、乡间小路、地图无法触达的内部道路等等,而无图化,给了现阶段智驾系统实现覆盖点到点通行的一种可能性。
去掉激光雷达与去高精地图,这两条路线在某些方面是相同的,其中并不是因为激光雷达/高精地图本身的问题。目前,摘掉激光雷达,带来与智驾头部梯队相同能力并量产落地的车企,目前只有极越和特斯拉(美国)两家。
事实上,去激光雷达只是目前智能驾驶发展的分叉路线,激光雷达并不会因此被淘汰掉。就如同车企在城区选择重感知,轻地图的路线,在高速又纷纷以高精地图为主的情况。虽然有很多车企在尝试摘掉头顶上的那块凸起,但也有厂商坚定着使用激光雷达进行融合感知。
既然不是激光雷达本身的问题,那去掉激光雷达的目的在哪?在年末的 NIO Day 专访上,蔚来的智驾团队给出了一部分答案:成本。
在去掉激光雷达后,智驾技术路线上同样也随之发生变化。极越在硬件方面只是摘掉了激光雷达,但仍有保留部分毫米波和超声波雷达;特斯拉则是激进地选择了去掉所有的雷达,选择只以摄像头进行感知的纯视觉路线。
在 BEV+transformer 为车辆还原现实世界的基础上,特斯拉在2022年提出了有关自动驾驶车辆的一种基于视觉能力的全新算法——Occupancy Networks,直译为占用网络。
这套算法的目的在于解决在 3D 空间网络中所识别到的异型障碍物,原理则是通过“堆方盒子”的概念,也就是将现实世界中的物体用 3D 像素方块堆叠还原,从而表达出检测的物体。
占用网络就像一个可以无限伸展的魔方,只需要知道前方是否有方块堆叠阻挡智驾系统规划的行车路线,不在乎它所检测的对象是什么,也不需要像以往矩形框识别标注般依赖训练。
就目前各家车企的智驾技术路线来看,基本上都选择走向 BEV+transformer + 占用网络的结合方向。而在方向趋同的情况下,在未来,不同车企之间的智能驾驶将有可能从体验、交互、商业模式上会为用户带来明显差异化的内容——
最后,无论是用雷达做融合感知还是纯视觉,在现阶段而言,两者终究只是略带争议的并行路线。未来最终决定该如何走,不由车企选择,而是由用户体验和安全性来决定。
在智能驾驶芯片的选择上,目前头部梯队的选择基本都由英伟达包圆,各家或基于单颗 Orin 、双 Orin 、甚至有如蔚来般财大气粗的四 Orin 作为基础去推进智驾落地。而就目前的城区智驾落地情况来看,拥有城区智驾能力的车型,其无一例外都采用了大算力芯片的方案,算力区间在 400-1000TOPS 不等。
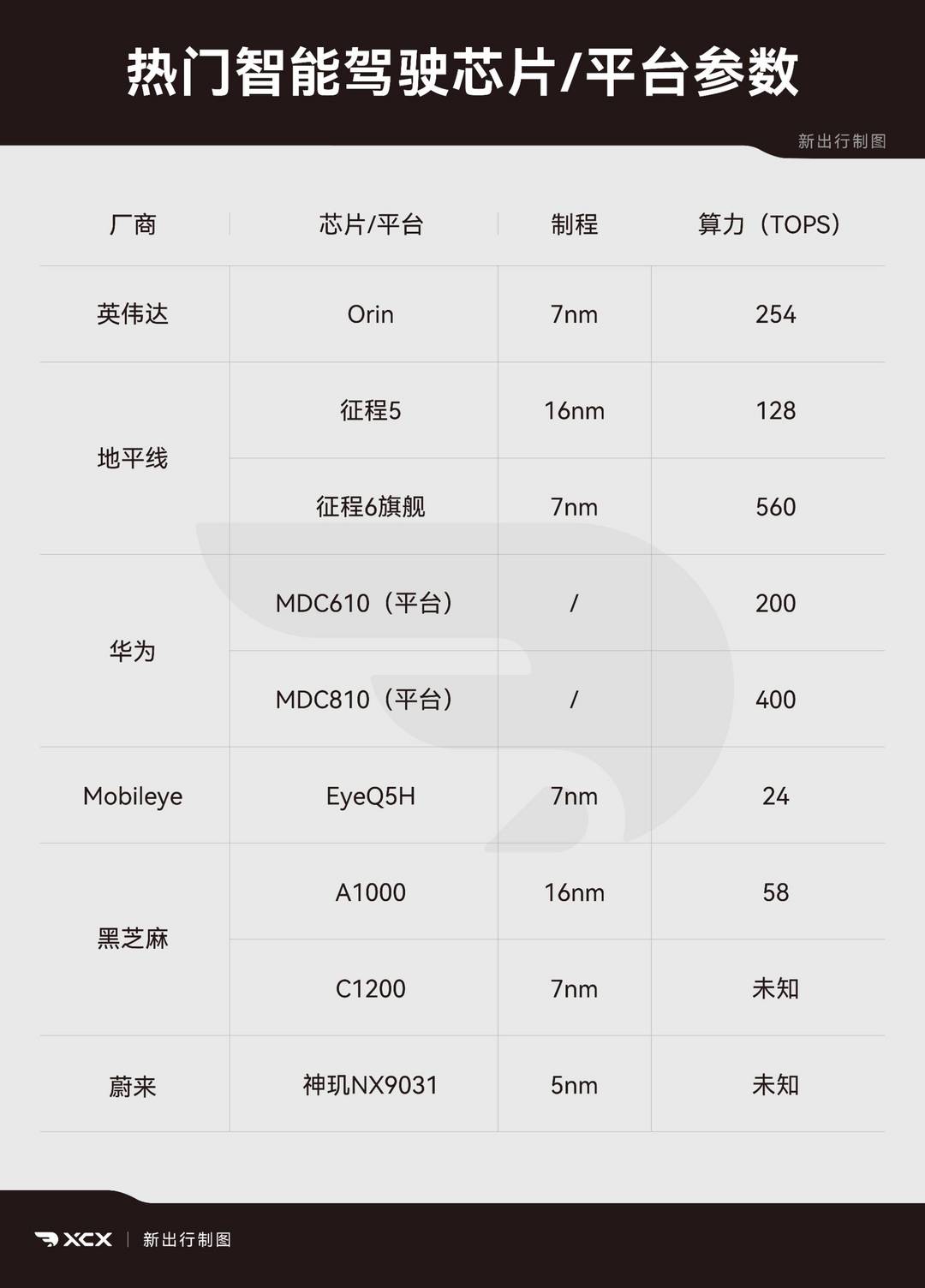
而在 2023 年的热门芯片上,我们也能发现趋势——中低算力的芯片通常出没于高速智驾的情况,如理想 Pro 方案上搭载的地平线征程 5、极氪 001 所搭载的 Mobileye EyeQ5H、领克 08 上的黑芝麻 A1000、商汤绝影等等;而同样有着城区行车能力的问界,背后则是华为提供的MDC平台,和 Orin 一样,都有着换算超过 200TOPS 以上的算力。
固然大算力芯片可以做到一力降十会的效果,但对于中低端车型而言,想要实现等效的智驾能力,去使用大算力芯片,在成本考量上显然是不划算的事情,此时新的需求便应运而生。
如何解决中低价位车型的智驾能力?由于城区智驾的门槛所在,耕耘中低端车型的品牌在短时间内显然无法解决城区方面的内容,但相对容易的高速路段,泊车辅助等功能,实现起来容易许多。
如同英伟达这种类似山姆超市按箱卖的商业思维,显然不适配中低端价位的智驾模式。智驾上车中低端车型,唯有两点:便宜与快。中低端车型面对的大多为价格敏感型用户,在定价策略上显然不能效仿使用大算力芯片的车型。
而在一个成熟集团式车企的产品线上,中低端产品的布局永远布置地密密麻麻,车企内部的智驾团队在现阶段不可能针对每一款车型进行重新标定和训练,这便需要芯片供应商提供不同价格,不同算力的芯片平台供车企选择,加速车企在中低端产品的智能化转型。
对于使用大算力芯片的智驾车型而言,同样也面临着两个问题:一是规划化后的降本,二是新一轮的需求定义。英伟达和华为等芯片平台供应商,终究只是供应成品,进入城区智驾领域,不同车企会对芯片有着差异化的需求——此时便自然衍生出车企自研芯片的路线。
自研芯片本质上打破了车企与供应商之间的供需关系,车企通过自研芯片,可以掌控更底层的接口,将当下的需求梳理后,对芯片在架构和设计指标上进行优化和取舍,从而达成降本增效的目的。
因此,当车企在初期的智驾开垦结束,对于不同价位段的产品,芯片供应商们便会相对应地涌现出中低算力的芯片平台和打包方案;而又因为城区智驾的门槛存在,在目前没有供应商方案能进行完整的城区行车时,车企仍会继续采用自研方案进行城区推进;当城区推进到一定数量级后,针对差异化需求,自研芯片的道路便自然而然展开。
我们在 2023 年目睹了小鹏的智驾风暴,目睹了蔚来的千站达成,目睹了问界的黑马奇迹,目睹了理想的销量冲击……在智能化的领域,2024 年还会有着更多新朋友加入,更多老朋友的焕新。这其中无数的碰撞及竞争,想必在多年以后会催生出更多的光辉与美谈,希望那时我们还能在此与大家一同分享。
来源:第一电动网
作者:新出行
本文地址:https://www.d1ev.com/carnews/pingce/219267
以上内容转载自新出行,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号