新势力们搅浑汽车市场这潭水,也不全是坏事。
最起码,保守甚至躺平的传统车企们,也知道时不时地展望一下未来,放下身段去斩获一些关注热度了……
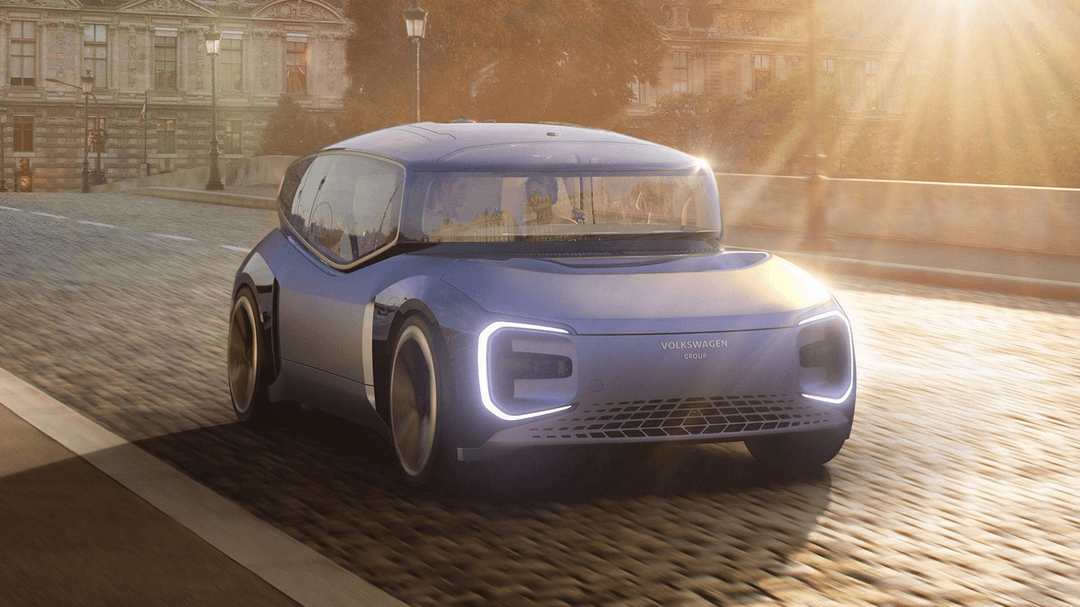
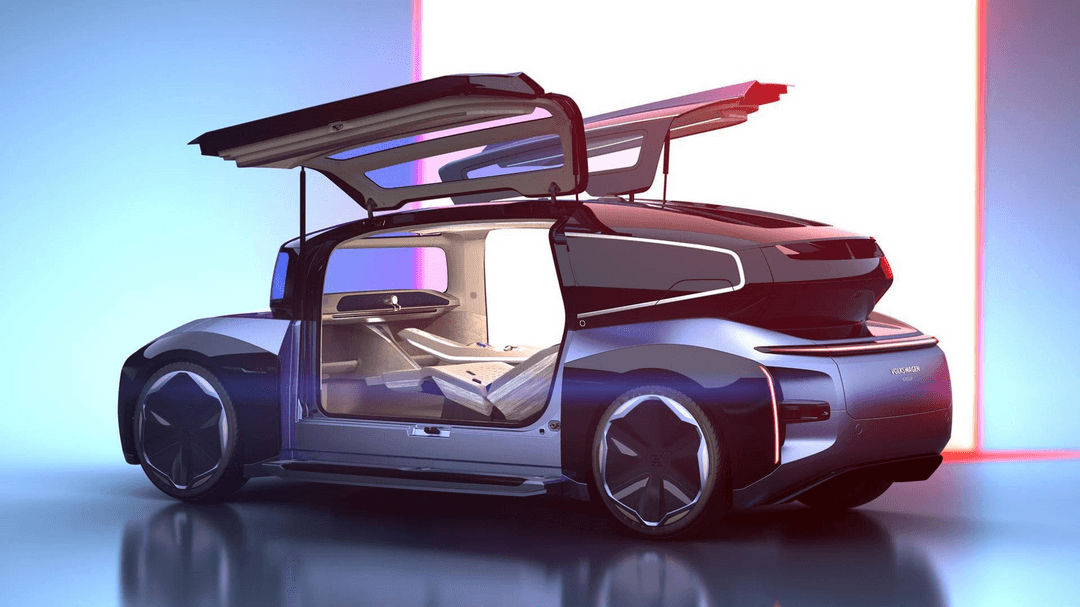
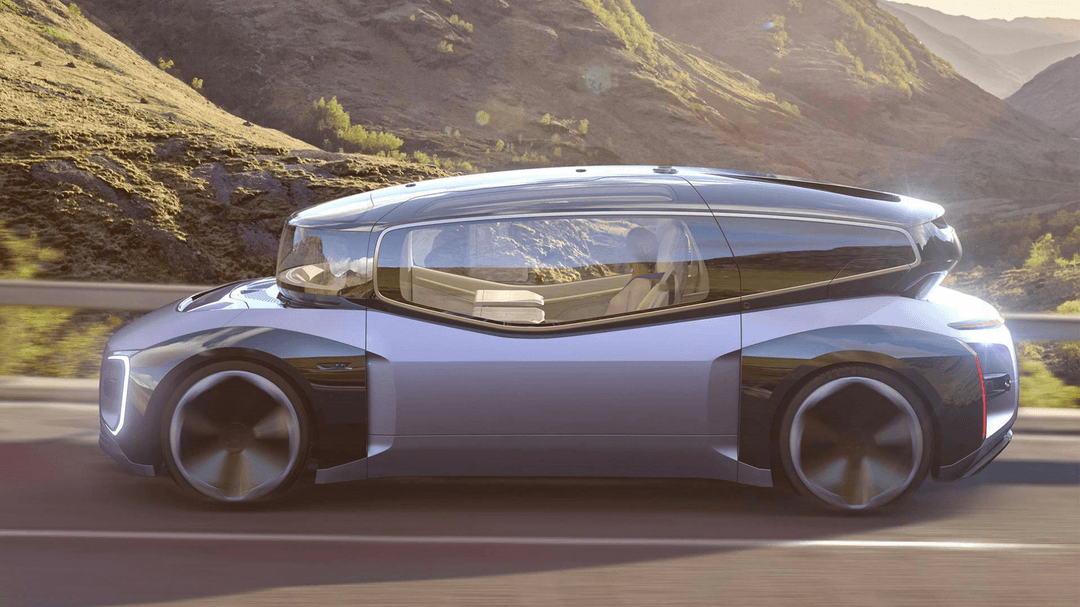
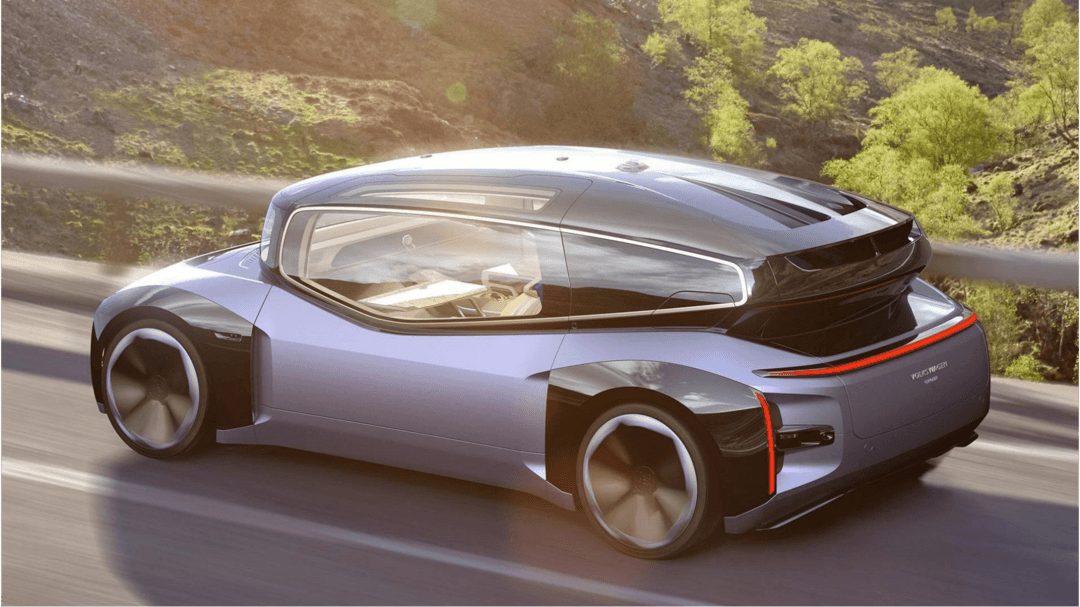
就比如,在智能化技术上已经保守相当一段长时间的大众,近日发布了一组GEN.TRAVEL的官图。
零排放、零压力的出行方式是其主打的展望卖点,L5级别的辅助驾驶和电驱动是技术核心。
那么,大众想象的这种未来产品究竟还离我们多远?
技术上,又需要工程师们做出哪些突破呢?
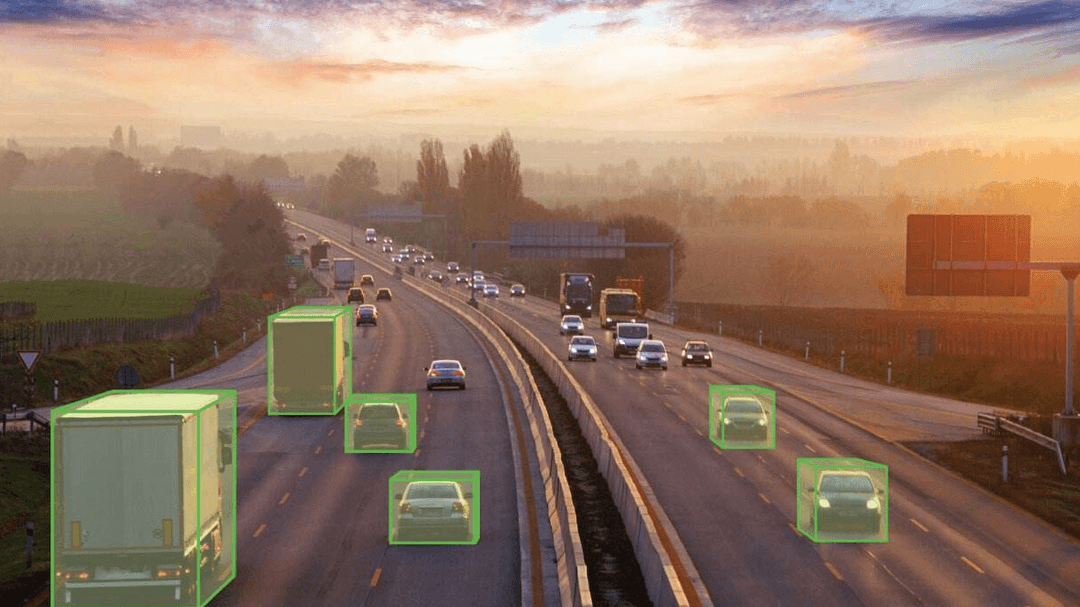
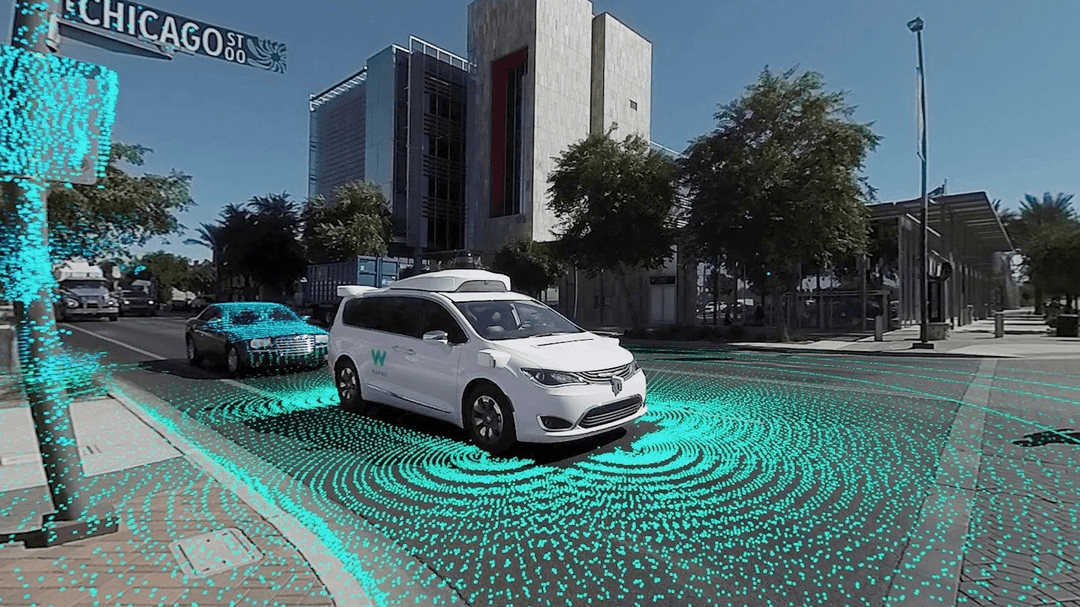
感知,是第一道坎
与真实的人学驾驶证需要视力体检一样,如何最大程度地感知环境,仍然是不少车企头痛的关键问题,尽管当下各种雷达和摄像头等已经在汽车上普及。
这种感知并非简单地判断一些相当明显的环境,对全工况下的环境判断才是工程师们关注的重点。
比如,在大雨场景行驶中,以摄像头为主的视觉方案已经开始概率失效,毫米波雷达成了很好的补充。
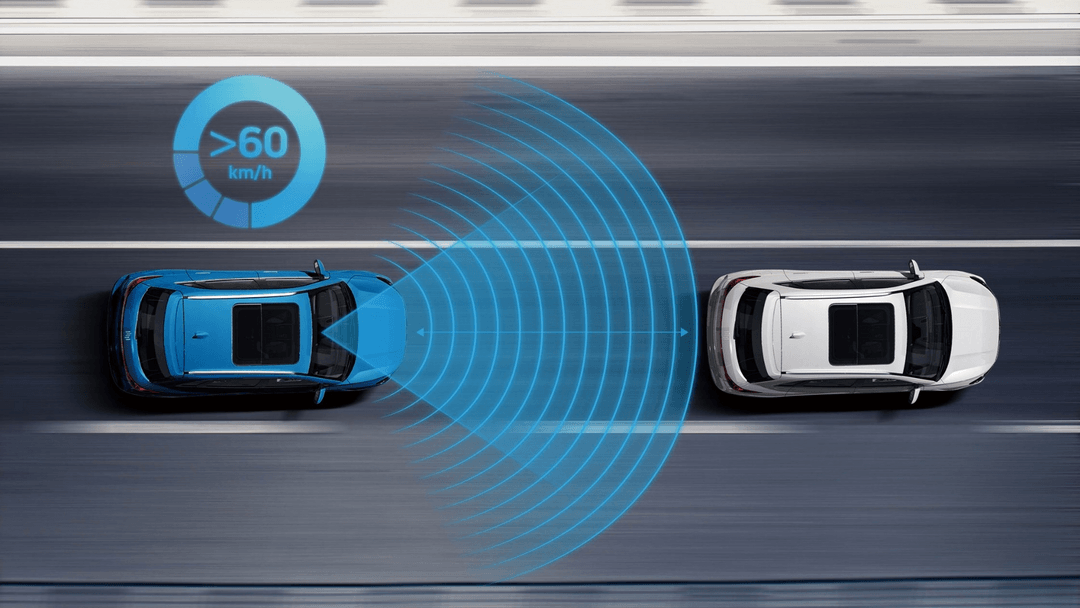
又比如,在需要快速做出避障及紧急制动的场景下,激光雷达的优势又尽显,传感器的迭代,显然是进无止境的过程。
其次,在接收到如雷达、摄像头、GPS、陀螺仪等多种传感器信息之后,丰富度是有了,但考虑到有着上限的处理器,如何融合一样是个不小的坎,毕竟直接无视某一传感器上报的信息显然太过不合理,对安全也是不小的挑战。
算法和平台,很关键
L5自动驾驶的第二点,就是算法。
这点不用过多解释。
在当前,汽车产品已经喊出了软件定义汽车的口号,在接收到关键信息之后如何保证安全和误报率的情况下做决断一样需要很多算法工程师“秃头”,一定程度上,这点也是当前算法工程师动辄百万年薪的因素之一。
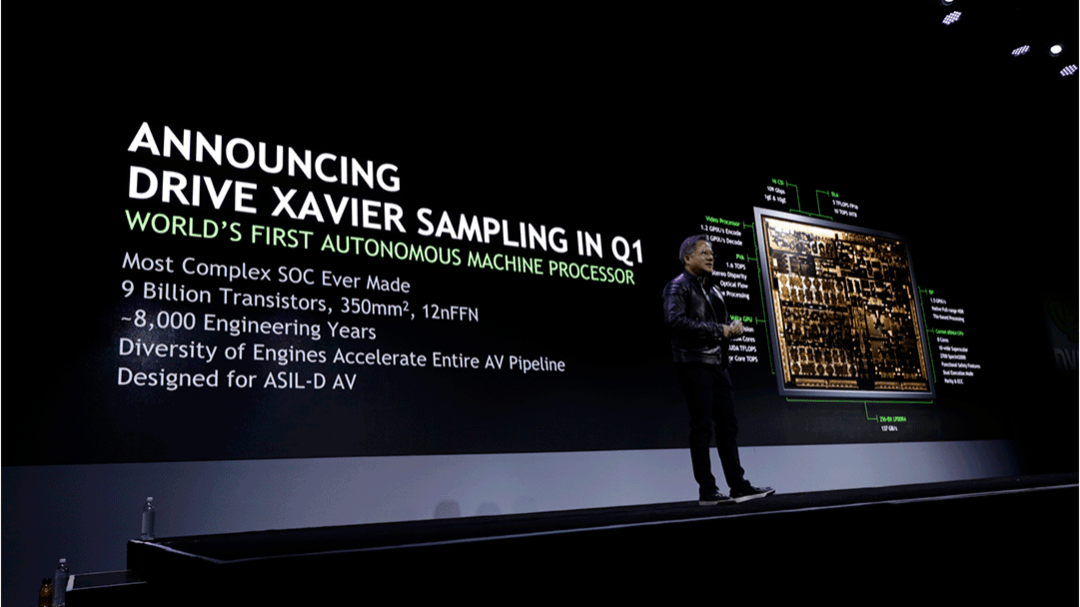
另外,算法完成之后,如何在处理器上让这些代码跑起来同样是OEM头痛的重点。
无论是英伟达的计算平台,还是国内的地平线,算力一直是自动驾驶的瓶颈。
为了无限增大场景覆盖度,代码可以有很多行,但不管是神经网络还是其他的智能算法,总是要有算力来支撑,这些理解起来并不难。
带头吃螃蟹?是要有胆量的
最后,即便是算法开发完成,硬件平台也在成本的支撑下达到门槛,感知系统也通过堆料做到了豪华。
但是否敢放到市场,也是极其考验胆量的,不光是对车企,对政府来说也是一样。
当前自动驾驶大多数卡在L2级别的关键是,在辅助驾驶过程中出了事故责任人在驾驶员,L3则是辅助驾驶系统开始承担部分责任,在L4就已经是辅助驾驶系统承担全部责任。
也就是说,一旦L4或者L5级别的智能驾驶产品遇到相当特殊的场景而发生事故之后,车企需要对所有损失买单,这对任何一个品牌来说都是堪称存亡的挑战,有这种底气的OEM显然相当有限。
同时,敢于改变这种判罚标准的政府智库,想要改变的压力也是相当庞大的。
结束语
作为汽车行业的一员,对于大众GEN.TRAVEL畅想的“未来”,显然我们对其成为现实是持正向态度的。但其最终落地的时间点,可能要比我们想象的长得多,一方面是技术的开发,一方面是利益和责任的权衡,何时能达到所有的完美?可能要到5年或10年之后,才能有答案。
来源:第一电动网
作者:二师兄玩车
本文地址:https://www.d1ev.com/kol/186061
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!









 京公网安备
11010502033163号
京公网安备
11010502033163号