小鹏P5的城市辅助驾驶(CNGP)功能实际上已经开始小范围内体验了,从各种途径看到的反馈都很不错,前两天我们微信群里也聊了这个事,很多小伙伴对于城市辅助驾驶还是感到有很多保留,其实是非常正常的,有个小伙伴还具体在“用户上手难度”、“用户必要性”、“接管冗余”和“责任分担”上进行了讨论,那我们就在这几个维度上来聊聊。
1.用户上手难度。
实际上这个问题,并不仅仅是城市辅助驾驶,包括高速辅助驾驶,甚至是车道居中(LCC),自适应巡航(ACC)等功能上,都会有这样的问题。很多用户买了这些功能之后,甚至到把车卖掉都没有用过几次。其实,放大这个角度,还可以看到更多类似的情况,比如对待干衣机,对待扫拖机器人,对待洗碗机,对待各种新事物,可能都是一个比较保守的态度。

因为这些新事物普遍都有一个“不是通过一次试驾或者试用”就能够觉得这是有用的东西,而产生购买的意愿。
在现在这个情况下,实际上这些智能设备或者功能是需要一些了解和学习门槛的,这取决于一个人对待新事物的态度,类似于听到电动汽车,有的人说“这个很有意思,让我来了解一下”,有的人会说“哪里有地方充电,没电了停在路当中怎么办?”。这就是一个学习的门槛,所以,用户上手的难度并不因为城市辅助驾驶而产生,这是一个人对待新事物的态度而决定的。
而有兴趣去了解新事物的人,对待新技术比如城市辅助驾驶的能力,会是一个愉悦的过程,因为这是一个探求新知和了解未知世界的过程,既然是愉悦的过程,就不存在所谓需要多少公里的体验,才能上手的过程,尤其是当下的智能汽车的辅助驾驶,都处于不断的升级和优化过程中,你昨天的体验规则可能一次OTA之后就被改变,而不断的探索能力的便捷,本来就是辅助驾驶的乐趣所在。
在这个话题下,很多人认为,短途的城市出行,其实我自己开并不觉得累,我可以自己开。
这个观点我是完全认同的,尤其是当今城市通勤,大多数情况下,驾驶者都可以胜任自己开的情况。但是我们来看几个逻辑:
“100公里的高速出行,我可以自己开,不就一个小时的事情么……”
“泊车入位谁还不会了,我自己会泊车……”
“大屏操作很方便,我不需要使用语音……”
“洗了这么多年碗,哪里要什么洗碗机……”
“拖个地才要几分钟,为什么要用拖地机器人……”
……
然而现实是什么呢?
现实是当初大多数选了低配G3的用户后悔为什么不加两万上中配可以自动泊车+L2.5级辅助驾驶。
现实是当初选择XP2.5的P7用户后悔为什么不选择好玩的XP3.0而拥有NGP,VPA这些好玩又好用的功能,甚至质疑为什么就不能硬件升级呢?
现实是用了洗碗机和扫拖机器人的家庭,纷纷都表示不会洗碗和拖地了,真的非常好用,为什么不把省下来的时间追追剧呢?
……
因为当前阶段的智能最大的意义应该就是“降低简单重复劳动”,比如高速NGP实际上,就是在高速上减少了驾驶员“调整方向”和“调整油门刹车”这些简单重复劳动。而实际上在城市路面上,这样的情况只会更多,而城市辅助驾驶恰好可以在很大程度上缓解这一问题。
至于类似“如果需要我高度集中精力随时接管,感觉还不如我自己开更累”的观点很多这样的话题,其实在高速辅助驾驶(NGP),甚至是车道居中(LCC),自适应巡航(ACC)等功能上都有这样的问题,而正如在上个观点中所说的一样,实际上只要通过一段时间的使用,掌握了能力边界之后就会很好的应用这一功能。
3、接管冗余
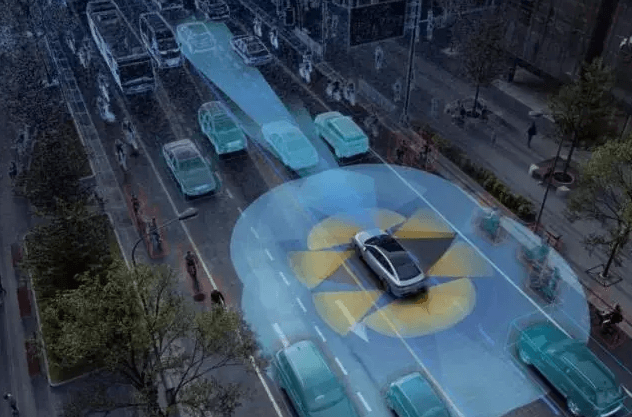
城市场景下的接管冗余似乎看起来很紧急,其实仔细分析高速场景下的情况,警告场景并不是会很早给出的,比如在大曲率弯道的情况下,只有当车辆触碰弯道边线的时候,车辆才会给出“接手警告”,而这个场景下其实已经非常紧急了,因为边线和防护带只有1-2秒钟的安全冗余了。

解决这种问题的方法其实还是上面说到的能力边界的学习,当你在城市路面驾驶一定多的场景下,你会了解到哪些场景是城市辅助驾驶所能应对的,而哪些场景是不能的。比如,10公里以下的车辆贴边插入系统可以及时预警,又比如外卖小哥在侧前方距离一旦小余多少的情况下,车辆可能会无法来及反馈,当这样的场景发生的时候,可能驾驶员需要准备把脚放在制动踏板上做好准备。
而人机共驾技术和模拟辅助技术或将会是改善这一体验的核心技术之一,通过人机共驾来让人驾驶和系统驾驶中无缝衔接,而避免更多的启动和停止辅助驾驶的重复操作。至于模拟辅助技术,将帮助驾驶员更好的了解到车辆的感知环境和下一步行动的方向,从而增强驾驶员的信心。
4、责任分担
毫无疑问,在当前的技术和法规上,驾驶员对车辆的状态承担全责,因为辅助驾驶的定义就在于是一项辅助功能,现在的逻辑就在于比如你骑自行车被链条擦伤了腿,很难认定是自行车保护装置不合理而追责,更多会认为你没有合理使用自行车,辅助驾驶也是一样。
但这个问题的解决方案并不在于要把安全性提升到100%安全,即便是高精度的民航客机,100%安全性也是不存在的,要解决这个问题的通道在于保险,通过保险公司对高阶辅助驾驶场景下的责任承保,来解决小概率的长尾场景,是目前看来推动自动驾驶的主要途径。
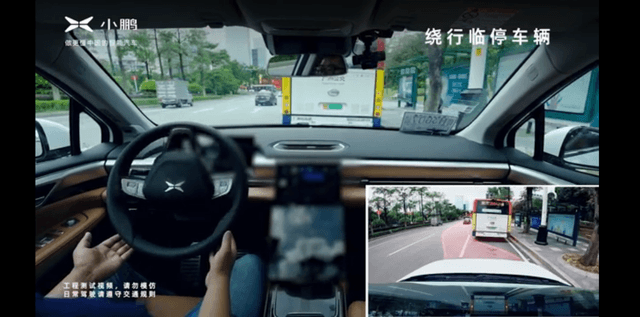
5、关于小鹏的城市NGP
在全球率先量产城市辅助驾驶技术—这应该是小鹏这一段时间追求的目标,是的,赶在FSD之前实现量产交付,确实是一个非常有吸引力的目标。
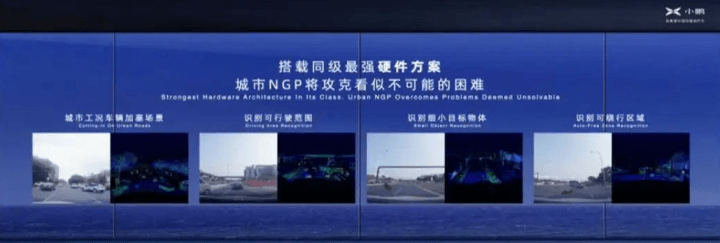
从目前个人了解到的情况来看,小鹏的城市NGP以及激光雷达加持的多项辅助驾驶功能表现应该是非常可以,在大多数的场景下可以完成既定的辅助驾驶目标,而且达到可以接受的用户体验。
不过,作为消费者,尤其是针对P5的激光雷达车主,我还是聊一点个人的观点,城市辅助驾驶功能非常值得期待,但是还是建议控制预期,主要原因(个人瞎猜,不代表任何官方立场,大家看过一笑了之):
(1)体验城市集中在广州,这是小鹏平时开展辅助驾驶训练的大本营所在地,相信会是经过超多轮优化和改进后的结果,尤其是针对地方情况的长尾场景, 相信做了很多的优化和调整,到了其他城市未必有如此细节的调整,达到广州那么惊艳的效果。
(2)受到疫情的影响,城市辅助驾驶需要的城市辅助驾驶地图的采集、测试和审批的节奏大大放缓,在这种不可抗力的影响下,城市辅助驾驶的完整能力(注意是完整能力)可以在多少城市上线,可能需要一个过程。
(3)P5车型的CNGP功能并不是去年1024上展示的全场景辅助驾驶能力,P5的城市辅助驾驶能力大概率无法覆盖各个城市的所有道路,而是大部分主次干道,所以,依靠P5在大多数城市是无法实现点到点的全场景辅助驾驶能力。
所以,P5作为20W左右的车型,可以首发城市辅助驾驶,并拥有在大多数场景下比肩极狐HI版本(40+)的辅助驾驶能力,感觉再次印证了P5上市时候我个人的建议【高阶辅助驾驶的性价比天花板】,在目前的范围内P5的智驾能力在30W以内几乎无人可及,即便到40W这个价位,短时间内还没看到对手的身影。
来源:第一电动网
作者:大包子狸
本文地址:https://www.d1ev.com/kol/175487
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!








 京公网安备
11010502033163号
京公网安备
11010502033163号