
今天著名特斯拉黑客 Green 在推特上分享了特斯拉新版本软件的功能介绍,时隔 3 个月,Autopilot 功能终于迎来了新的更新,看完版本介绍之后,我认为特斯拉向实现 Full Self-Driving Capability 又迈出了开创性的一步。

识别信号灯、停车标示并自动刹停
先来看这次更新的版本介绍。
原文过长,后台回复 Autopilot TACC 获得完整版本介绍
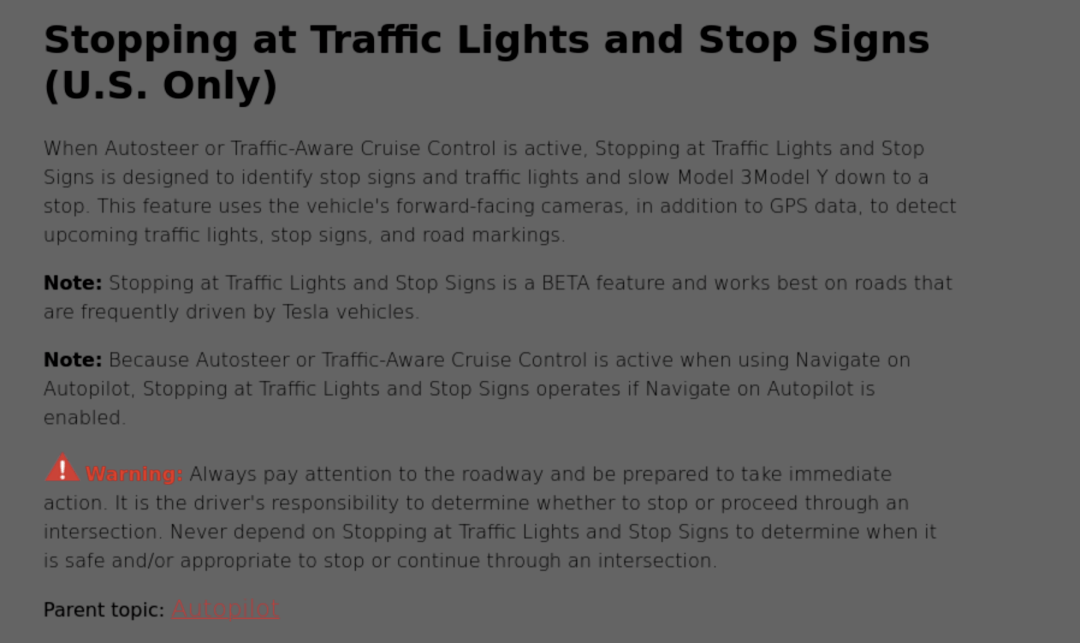
在新版本软件中,车辆在 Autopilot(下文简称 AP)状态下识别到「交通信号灯」、「停车标志」和「停车线」后,可以在停车线前自动刹停,并且在驾驶员给出确认信息后,车辆还可以自动通过十字路口。
这意味着 AP 已经可以主动通过一些没有车道线的直行路口了,注意我加黑的 3 个关键词,也就是说本次的软件更新进一步拓展了 AP 在市区路况下的工作能力,逐渐摆脱了对车道线的强依赖,这是实现 Full Self-Driving Capability 的重要一步。
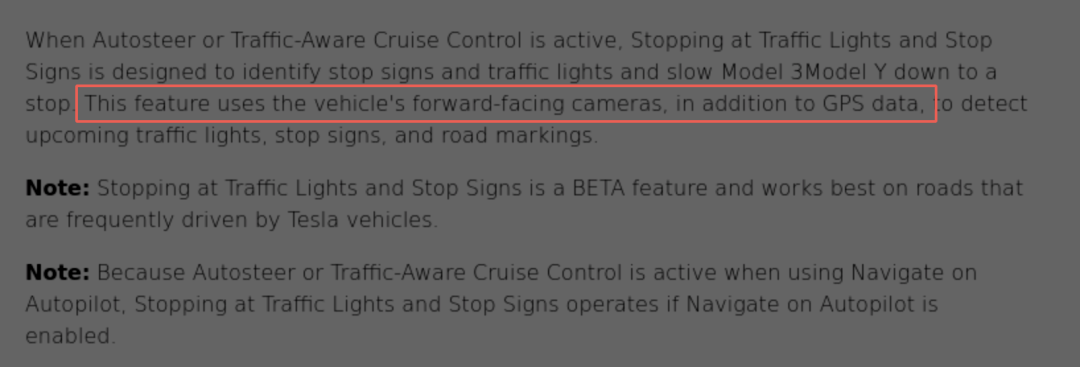
从以上几个场景来看,目前只能支持短时间摆脱了对车道线,特斯拉在版本介绍中明确表示,该功能并不仅仅基于前置摄像头的视觉感知识别,还会集合 GPS 地图数据。
也就是说虽然短时间摆脱了对车道线的依赖,但是 GPS 地图数据的依赖逐渐提高。
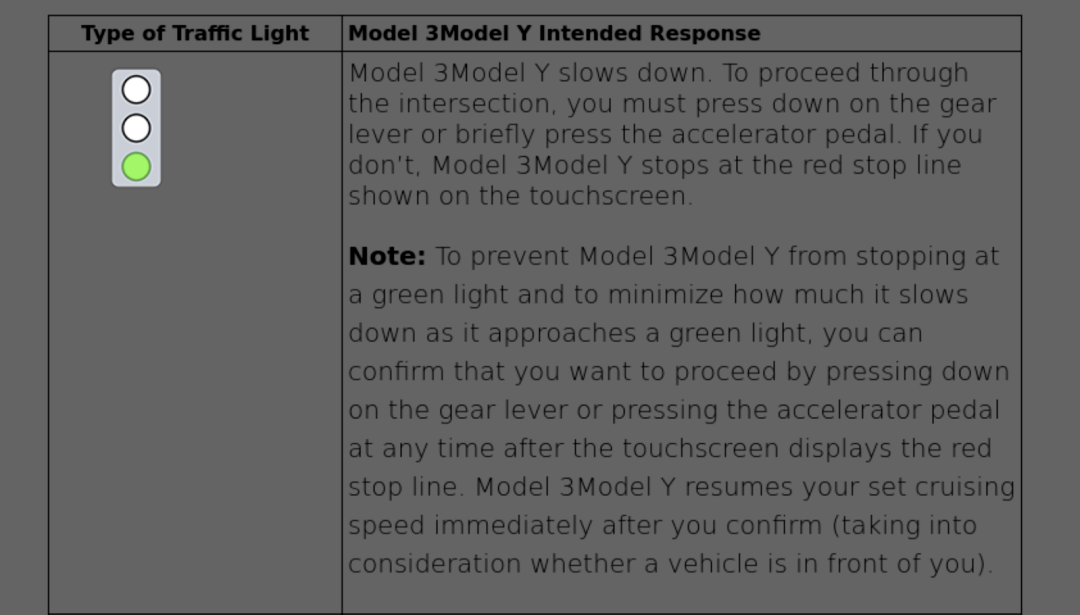
另外还有几个细节是,车机屏幕上会提前显示出识别到的红绿灯和停车线,即使在绿灯情况下,车辆的第一决策仍然是减速,驾驶者需要通过「拨换挡杆」或者「轻点加速踏板」两个方式,恢复巡航,车辆才会自动通过红绿灯路口。
在黄灯或者绿灯闪烁的情况下,如果车辆还未驶过停车线,系统则会自动刹停,如果车辆驶过了停车线,则会正常通过。
在红灯情况下,车辆会自动刹停,但是同样需要驾驶者通过「拨换挡杆」或者「轻点加速踏板」两个方式,恢复巡航。
这里的逻辑与目前高速路段中 NoA 状态下的变道策略完全相同,车辆自动做出变道的决策,但是需要驾驶者给出确认信号,车辆才会执行。
就像一个在学过马路的 3 岁的小朋友一样,到了路口不管红灯还是绿灯,先减速,再问爸妈可以过吗?爸妈说可以,然后再过。
今天早上我们在微博上发布了这则信息之后,也有网友提出了质疑,例如:「经历过北京春节满街红灯笼的洗礼吗?」
(画面大家可以脑补一下)
这就是特斯拉仅靠视觉识别判断红绿灯需要克服的一个重要问题,如何提高识别的正确率?
在 2019 年底,特斯拉推出全自动驾驶可视化界面预览,意味着车辆已经可以识别红绿灯、停车标示了,但是还不能判断红绿灯给出的信息到底是什么意思。
千奇百怪的红绿灯造型,千奇百怪的执行逻辑,尤其是一些复杂的大型路口,对于路痴们来说,见了都得懵半天,更不要说啥都不懂的机器了。
为了教会机器如何判断红绿灯,特斯拉的方法是,通过「自监督学习」。简单来说就是,系统看到了现在是红灯,虽然系统不知道是什么意思,但是系统通过驾驶者刹车的操作可以判断出,红灯需要停车。
以特斯拉目前的水平显然做不到 100% 的识别正确率,为了保证安全,每次执行自己的决策之前都会找驾驶者确认一遍,但每个确认的过程都是学习的过程。
这也是特斯拉无法完全放手让系统自行通过路口的核心原因。
对于特斯拉来说,越多人使用意味着可以积累越多数据,但是对于驾驶者来说,AP 状态下每次通过路口都需要增加一个「确认」的操作,很大程度降低了用户体验,尤其是绿灯场景下,每一辆开着 AP,但没有及时确认的特斯拉都会是路口的一个大型路障。
今天下午,我两位特斯拉车主介绍了新版本软件的工作逻辑之后,得到了两个评价。
其中一位认为特斯拉作为第一个实现「自动」通过十字路口的车型,给了所有车型一个很好的示范,很大程度简化了「自动」通过路口的流程,面对复杂的红绿灯路口,只需要通过「轻踩加速踏板」即可完成决策。
另一位则认为,我原来开着 AP 可以直接过红绿灯,现在反而更麻烦了。
如果你问我这种牺牲短时间的用户体验来获得一个快速成长的取舍值得吗?
值得,为了获得科技带来的开创性体验,我愿意牺牲短暂的体验,我也期待在特斯拉完成了「量变」积累之后,使用体验的「质变」。
下一个挑战
这次的功能说明虽然很长,但是「警告」占了多半篇幅,看了两遍之后,我弱弱地在群里问了一句:「特斯拉这个应该还不能实现自动转弯吧?」
得到的答复是:「在通过路口时只能直行。」
而我期待的是,新版本软件更新之后车辆可以根据设定的导航,自行通过简单的十字路口或 T 型路口。
这也是特斯拉实现城市道路 NoA 的下一个重要挑战,而在我看来,在十字路口实现左转或者右转,难度系数相比直行提升了不止一个数量级。
不如让我们拆解下,完成自动转弯需要那些支持。
车辆得获得转弯的指令
这一点并不难,只要在车机上设置好导航即可。
探测目标方向是否有其他参与者
从特斯拉感知硬件的布局来看,系统更擅长探测正前方及正后方的道路参与者,但是转弯,尤其是在直角弯道以及掉头的路况下,意味着车辆需要探测车身左右两侧的道路参与者,显然在感知范围层面来看,已经给系统提出了更高的难度。
判断其他道路参与者的意图
在十字路口,路权最高的是直行的车辆,其次是左转,最后是右转。
在通过直行的红绿灯路口时,只要你确保你没有违反信号灯的指令,并且不撞上前方车辆,即可保证「无责」,但是在左转 or 右转的情况下,系统需要判断多个方向的道路参与者的意图,并及时做出判断。
执行决策-完成转弯
所以通过开放道路的红绿灯路口并不只是会看红绿灯那么简单。相比目前的 L2 辅助驾驶,「直行」通过红绿灯路口只是在之前的基础上做了一些加法,而「转弯」则是乘法。
写在最后:
作为一个自动驾驶拥簇者,在特斯拉推出智能召唤之后,我已经很久没有如此期待一个新版本软件的到来了。身边支持 L2 辅助驾驶的车型越来越多,但能够带来新鲜感的却寥寥无几,所有人都在做特斯拉的跟随者,而我们周围需要的是更多的「开创者」,特斯拉是为数不多可以保持持续「开创」能力的车企。
来源:42号车库
本文地址:https://www.d1ev.com/carnews/xinche/112573
以上内容转载自42号车库,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号