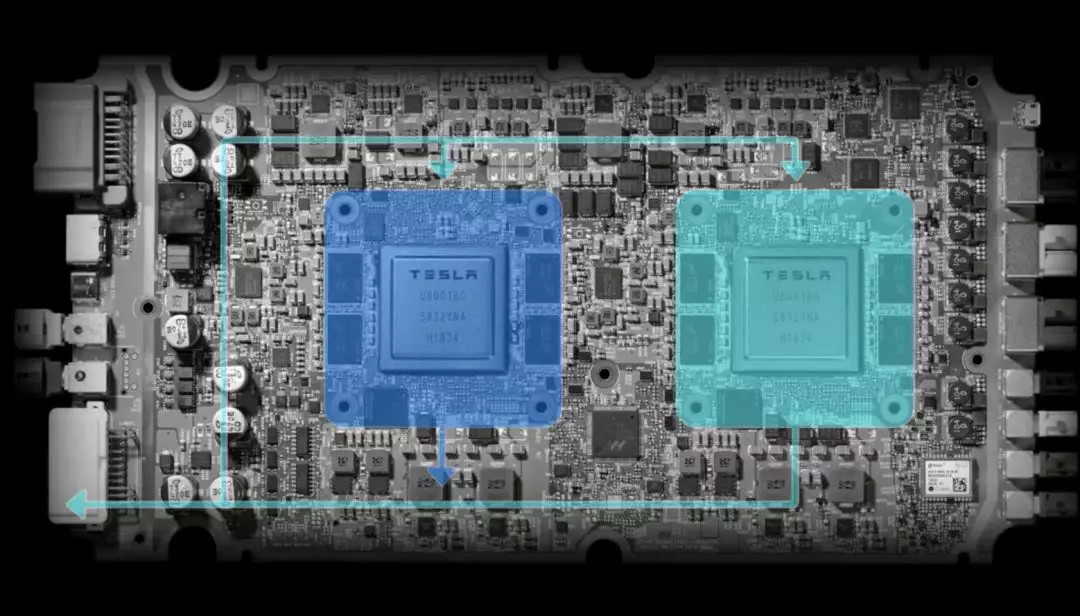
北京时间 4 月 23 日凌晨,特斯拉“自动驾驶日”活动在位于加州帕罗奥图的总部举行,马斯克终于亮出了自家的自动驾驶“核武器”——特斯拉“全自动驾驶计算机”(full self-driving computer,以下称 FSD 计算机),即之前所说的 Autopilot 硬件 3.0 正式亮相。
FSD 计算机的投入使用意味着特斯拉首度使用了自研车载 AI 芯片,目前这款芯片正安装进特斯拉生产线上的每一台电动车中。根据特斯拉官网信息,“完全自动驾驶能力”选装价格为 46300 元,但如果在交付后安装,价格则会上涨到 6.5 万元。
整个发布会时长长近 3 个小时,其中的技术信息量可算是特斯拉有史以来所有发布会中最大的一次,大量硬件、软件的重要进展被集中披露。
从发布会可看出,尽管近两年来行业内都在强调辅助驾驶系统的落地使用,马斯克今天依然保持了一贯的特立独行的作风,似乎眼中只有“全自动驾驶”这一目标,并表示明年将能实现 Robotaxi(自动驾驶出租车)。在追求自动驾驶的同时,马斯克还在发布会上多次贬低L idar,而后者正是目前实现高阶自动驾驶所必备的零部件。
自动驾驶芯片,马斯克说“我们最强”

在马斯克眼中,FSD 计算机已经足够支持“全自动驾驶”,未来车主仅需进行软件层面的更新就能让车辆达到自动驾驶的水平。
发布会上,特斯拉自动驾驶芯片负责人 Pete Bannon 重点介绍了特斯拉的自研自动驾驶芯片,他是特斯拉从苹果挖来的芯片设计师,曾参与 iPhone 5 A5 芯片以及多款 iPhone 芯片开发。不难看出,在这次设计中,这位曾经与 Jim Keller 搭档领导苹果芯片研发部门的顶尖芯片架构师,也将苹果软硬深度结合的风格逮到了特斯拉,可以说非常 Apple 了。
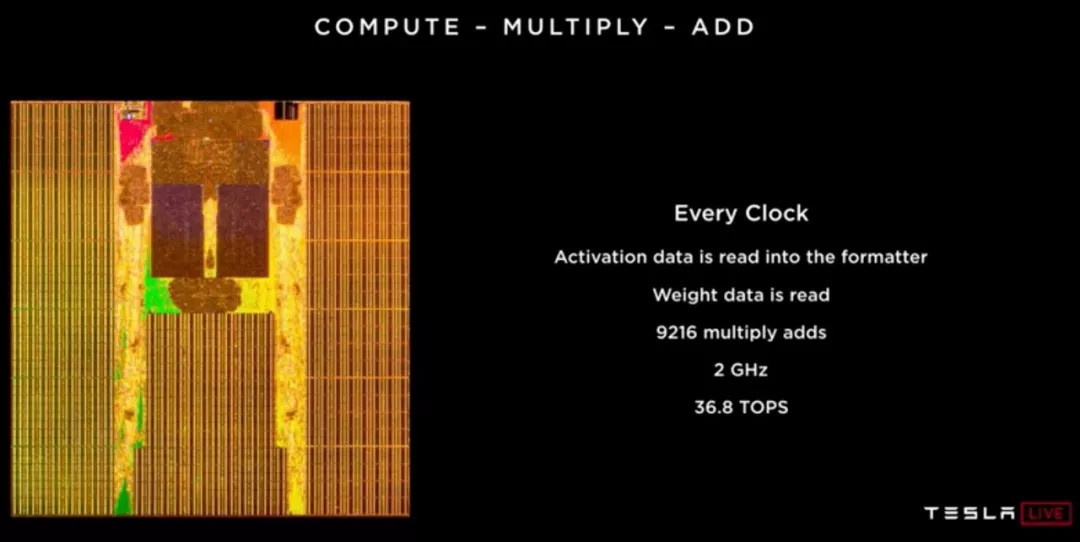
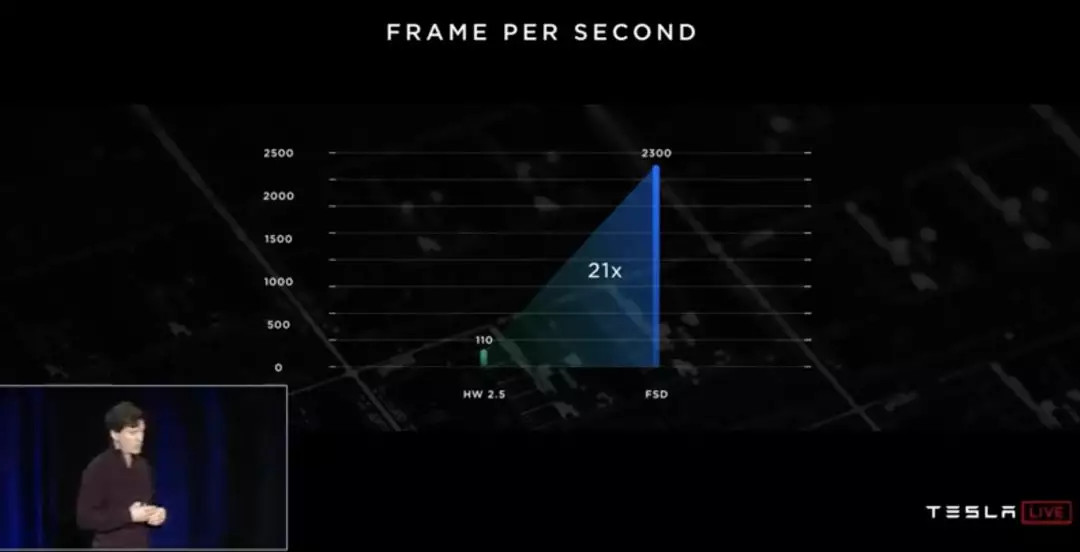
今天发布的自研芯片于一年半前设计完成。从公布的一系列的参数来看,无疑是相当强大的一款硬件:144TOPS(完胜竞争对手目前最先进技术 21TOPS 的表现)另一个亮点是,这款新品新的神经网络加速器(NNA)达到令人难以置信的 2100FPS,将由三星代工生产。在不影响车辆能耗和续航的前提下,FSD 能将安全性和自动化水平提升到新的等级。总体来看,这款 14nm 芯片的设计非常针对神经网络,团队对此进行了架构优化以降低耗能和成本,尤其针对处理大量的图像和视频。

Bannon 介绍道,最新芯片上的神经网络处理器能够处理 8 个摄像头同时工作产生的每秒 2100 帧的图像输入,相当于每秒 25 亿像素,表现是之前 2.5 版本的 21 倍左右。
马斯克透露,在过去的一个月时间里,特斯拉陆续放弃了英伟达提供的图像处理解决方案。马斯克表示,特斯拉的芯片是世界上最好的芯片,而且远超其他竞争对手。与此同时,特斯拉也已经将下一代芯片的工作进行了一半,马斯克表示下一代芯片可能比现有的好上 3 倍,有望在两年内推出。不过,马斯克并未准备在这次活动透露更多下一代芯片的信息。
 图丨有意思的是,就在发布会结束不久,英伟达表示,特斯拉这次硬件上和英伟达的对比并不准确,主要体现在 FDS 144TOPS 与 Xavier21TOPS 的表现上
图丨有意思的是,就在发布会结束不久,英伟达表示,特斯拉这次硬件上和英伟达的对比并不准确,主要体现在 FDS 144TOPS 与 Xavier21TOPS 的表现上
特斯拉坚定地选择计算机视觉
团队取得的这些成绩,也让这位 CEO 再度发出豪言:“任何使用激光雷达的自动驾驶公司注定失败(doomed)”。
而在软件算法的部分,特斯拉人工智能和自动驾驶视觉总监 Andrej Karpathy 罕见登场。这位李飞飞的高徒在斯坦福 AI 实验室攻读博士期间就已声名远扬,后加入 Open AI,特斯拉正是看中他在计算机视觉领域内的深厚技术积累,才将其任命为人工智能部门主管。
这位 AI 大牛在特斯拉的主要工作是训练 FSD 以及神经网络信息处理。Andrej Karpathy 的现场演讲展示了早期将神经网络部署在真实世界中训练的重要性,比如说,特斯拉的每一位司机其实都参与到了神经网络的训练中,每一个新手都将为特斯拉的自动驾驶系统喂入新的数据。而且,Karpathy 认为,在神经网络的训练中,和数据的规模相比,数据的质量更加重要,特斯拉的原始数据集也可能是全球最有价值的,因为特斯拉拥有全球范围的车队,可以提供各种环境、天气条件的数据,还会收集车辆的异常道路表现数据。在数据的标注上,特斯拉也正在尝试自动化标注的方向。
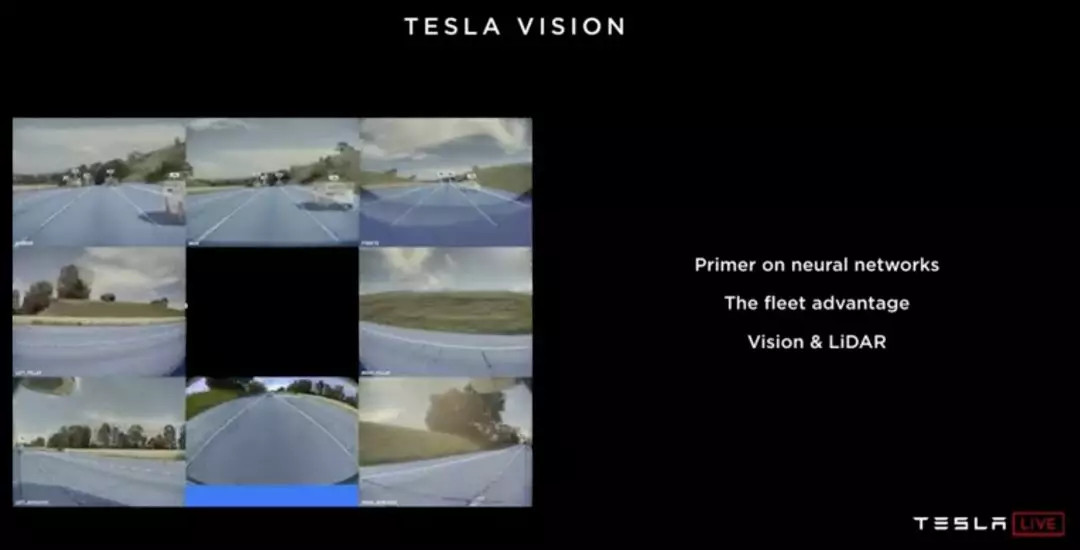
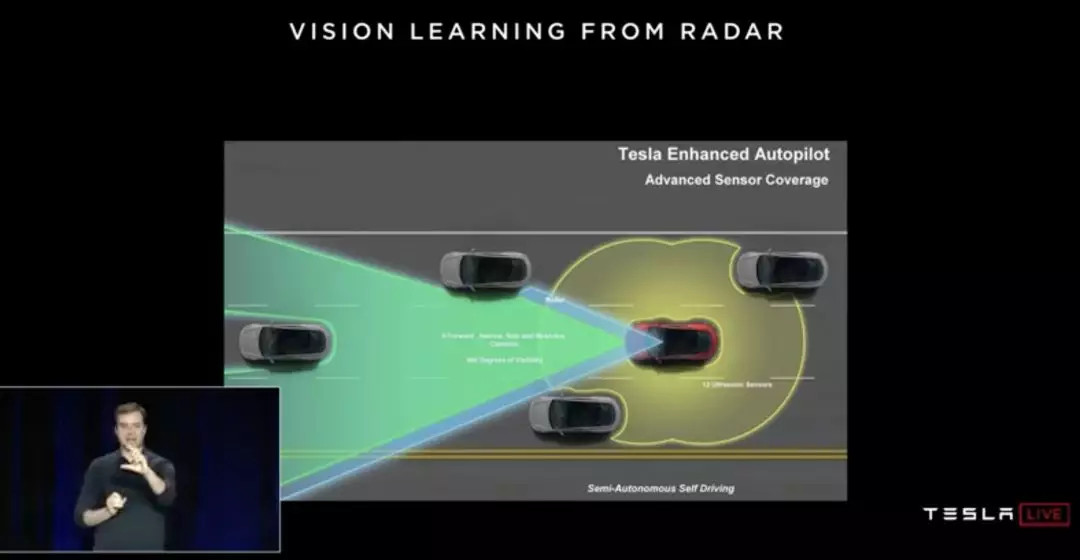
Andrej 强调特斯拉非常依赖视觉传感器,特斯拉的 AI 软件能够处理来自视觉传感器收集到的车道线、交通、行人等信息,将这些信号与已知的物体进行匹配再最终作出决策。
他同样对比了激光雷达(Lidar)方案和计算机视觉方案的优劣,而且显然也和马斯克一样是计算机视觉派:“某种意义上,Lidar 是一个捷径。它回避了对自动驾驶非常重要的视觉识别基本问题,给人一种虚假的技术进步了的感觉”。他表示,和 Lidar 相比,特斯拉更加依赖计算机视觉,并将收到的视觉信息进行 3D 渲染,涵盖视频输入到深度感知。
也就是说,特斯拉认为,摄像头+数据+神经网络,足以挑战 Lidar。如此认定计算机视觉嫌弃 Lidar,这种选择现阶段这在业内也非常罕见,绝大多数业者还是采用 Lidar 的方案或者 Lidar+计算机视觉,因为目前的纯计算机视觉方案在安全性的保障上仍有一定风险。
特斯拉 Robotaxi,等 2020 年了
除了非常硬核的技术展示外,最值得期待的信息,恐怕就是特斯拉 Robotaxi 时间表的披露了。
马斯克提到特斯拉网络(Tesla Network)及汽车共享服务,在共享出行服务不足的地方,特斯拉的车主就可以提供服务,例如他们推出 Model 3 Taxi 方案以及 Robotaxi,让拥有 Model 3 的公司或车主来执行 Robotaxi 服务,汽车成本低于 3.8 万美元,以及汽车寿命保证行驶 100 万英里等。

马斯克表示,“非常有信心”在明年推出 Robotaxi 计划,但不是所有地区,因为要考量监管因素。任何客户都可以将他们的汽车加入特斯拉网络(也可以移除),他形容这像是优步和 Airbnb 混合的一种模式。特斯拉也会推出自己的打车应用程序,并且从共乘服务的收入拿取 25%-30%。
再回顾整个发布会,大量硬件、软件重要进展的首次大规模披露,是特斯拉自动驾驶相关团队在过去 3 年成果的集体展示,也在向外界最大程度地展示了特斯拉发展自动驾驶的实力和诚意。当然,马斯克在会上立下的 FLAG 还需要大量的事实证明,毕竟,自动驾驶这个全行业公认的难题当然不是马斯克说解决就能解决的,再说,马斯克的跳票行为也早已不止一次两次了。
最后,联系刚刚在上海发生自燃事件以及 24 日第一季财报发布的这个时间点,特斯拉这次主要面向投资人的自动驾驶展示,附加价值也不言而喻了。
附:特斯拉的自研芯片与全自动驾驶之路
在早期的 Autopilot1.0 时代,特斯拉采用了当时在辅助驾驶市场倍受欢迎的 Mobileye EyeQ3 的自动驾驶芯片,而后者在当时的一大特点便是芯片+深度学习算法的软硬一体化的方案。这一方案当时受到了众多车企欢迎,但却与特斯拉想要不断升级迭代的理念不合。
2016 年 1 月,被称为芯片设计大神的 Jim Keller,加入特斯拉出任 Autopilot 总裁。随后,曾与 Jim Keller 在苹果共过事的顶尖芯片研发人才 Peter Bannon 也加入特斯拉,后续多位芯片架构师的加入,让特斯拉自研芯片几乎成为一个公开的秘密。
对于此前的芯片供应商英伟达,马斯克表示 Drive PX 2 不错,但算力还无法满足特斯拉想要的全自动驾驶的需要,加之功耗较高,特斯拉需要自己进行芯片研发。
值得一提的是,2018 年 Q3 财报电话会上的,人工智能与自动驾驶视觉部门主管 Andrej Karpathy 提到,他们已经为 Autopilot 开发了更大的数神经网络,但当时的硬件还无法提供足够的芯片计算资源,可见当时已是“万事俱备,只欠芯片”。
一直以来,尤其是在关键部位上,特斯拉都倾向于“能自己动手就不向别人采购”的做法,掌握自主权。如特斯拉早在 2004 年就让锂电池专家、现任特斯拉 CTO JB Straubel 组建了电池团队,早早的布局和在电化学上的高投入让特斯拉的动力电池技术有着明显的优势。
在自动驾驶方面,特斯拉自己动手进行软件开发,尽管向供应商采购了摄像头、毫米波雷达和超声波雷达等硬件,但特斯拉不要供应商提供的配套算法,让众多软硬件一体供应商变成纯硬件供应商。
在关键的计算平台上,特斯拉选择了英伟达的 Drive PX2,而在这之上同样运行着特斯拉自己开发的神经网络。
特斯拉对软件、硬件两方面的绝对把控,让其能够推动技术不断迭代。有更好的传感器就上更好的传感器,旧有的芯片算力不够,替换上自研的算力更强的芯片;软件的更新能够及时通过 OTA 升级,实现功能完善和开拓新的功能。软件硬件两条腿交替向前走,推动整体功能平稳提升。
现在,随着自研芯片的到位,特斯拉最终在这一核心零部件上将主动权牢牢抓在自己手中。
来源:DeepTech深科技
本文地址:https://www.d1ev.com/news/qiye/90229
以上内容转载自DeepTech深科技,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号