日前有外媒报道称,麻省理工学院正在开发一项新的成像技术,该技术能在雾中识别30-50米范围内的障碍物,以为自动驾驶系统提供参考,实现在雾中可以正常行驶。

近日来,自动驾驶汽车事故频发,而首例自动驾驶车辆导致行人死亡的案例发生后,可见虽然目前大多数的自动驾驶车辆使用的系统是基于雷达和高清摄像头组成的道路信息采集系统搭建,但并不能保证在任何时候给车辆提供周围环境的准确信息。特别是依摄像头为主要参考信息的自动驾驶系统,虽然能够比较准确的识别路标等信息,但在雾中它们就会变得毫无用处。
据了解,麻省理工学院的研究人员正在开发一项具有在雾中分辨障碍物能力的新技术,该技术可以提高自动驾驶系统在雾中的路况信息采集能力。研究负责人Guy Satat对这项新技术进行了一项实验,在实验中他们将一个特殊的摄像头置于充满浓重人造雾的空间内,使用特殊的技术解析57厘米(1.8英尺)范围内的物体图像,得到了较为清晰的影像。
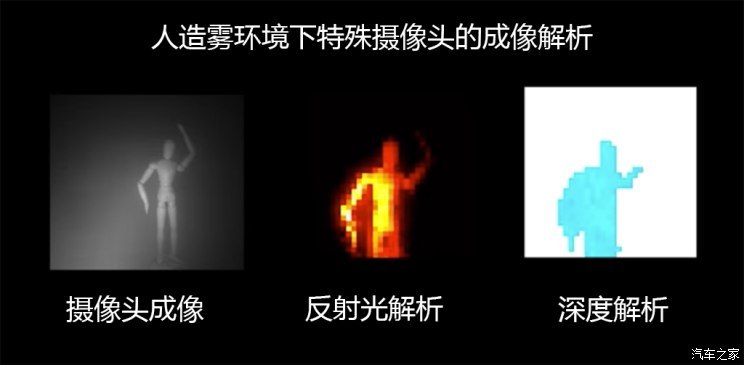
由于室内产生的雾比通常在道路上遇到的雾要密集得多,因此实验所得到的成像范围相当于摄像头在30至50米(98至164英尺)之间的可见度。“虽然这个在雾中识别成像系统很挑战,但我们认为将其开发完成有极大的意义,”根据麻省理工学院的Guy Satat说,“我们正在密集的进行各种条件下的实验,模拟动态和视感逼真的雾,甚至是更浓密、能见度更低的雾,以完善该系统能适应更恶劣的工作环境。”该研究项目目前仍处于初期阶段。该团队计划在5月份的计算摄影国际会议上介绍他们的新发明。(消息来源:autoevolution;编译/汽车之家 许博)
来源:汽车之家
作者:许博
本文地址:https://www.d1ev.com/news/jishu/66345
以上内容转载自汽车之家,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号