沉寂了快俩月后,特斯拉 CEO Elon Musk 满血复活了。上周,Elon 在 Twitter 上火力全开,干竞争对手;曝自家进度。不可控的 CEO 在可持续地作妖,目测特斯拉全球通讯团队又彻夜难眠了。
闲话不多说,一起来看看 Elon 都说了些什么。
9 月 4 日晚 9:00,保时捷全球首发了旗下首款纯电动轿跑 Taycan。早在 Taycan 发布一年前,保时捷北美 CEO Klaus Zellmer 就说过,超过一半的 Taycan 预订用户不是保时捷车主,其中排在第一位的是前特斯拉车主。
果然 Elon 坐不住了,在 Twitter 上大喊大叫:@保时捷,保时捷!Turbo 这个词的实际意思跟你想得不一样。
保时捷的 Turbo、Turbo S 这些命名方式主要是延续燃油车时代的逻辑,降低用户的学习成本,而 Elon 认为 Turbo 明明是「涡轮」的意思,电动车上哪有涡轮?
一个各说各有理的吐槽,又不影响用车,本应该过了。结果可能是因为人保时捷没理他,Elon 又缓缓打出一行字:Model S 下周纽北出征。
为啥要出征纽北呢?Taycan 发布前两个月,曾在德国著名的纽博格林北环赛道上刷了一次圈速,跑出了 7 分 42 秒的纽北四门电动车新纪录。Elon 要带着 Model S 去保时捷的主场打败 Taycan。

这条推一发,大家都笑了。为什么笑呢?这很明显是 Elon 跟保时捷置气的一时兴起,有网友评论说,说不定特斯拉赛道模式团队也是看到 Elon 的 Twitter 才知道,Model S 要出征纽北了。

谁能想到两天后,有人拍到了在通往纽北赛道的高速公路上拍到了一辆板车托着一台 Model S,重点来了,这台车装了四条米其林 PS CUP2 R 轮胎,米其林官方的介绍是「专为赛道使用设计,为高性能狂热者而生,同时可在公路使用的轮胎」。
好吧,特斯拉团队的执行力不得不服。我们也不知道这些人是什么时候行动的,赛道模式有没有 Ready。这家 4 万人规模的大公司,拎出任意一支团队都像 Elon 的四肢一样,随着他大脑的决策指哪打哪。
赛车手 Nico Rosberg 也参与进来,跟 Elon 说要没人帮你刷赛道的话电话摇人就行。这个 Nico 之前开过蔚来 ES8,也开过特斯拉 Model 3,但最重要的,他是 2016 年 F1 年度总冠军。
这下不去都不行了。外媒 Road&Track 看热闹不嫌事大,联系纽北赛道运营方确认此事,纽北很快回复:特斯拉没有向我们发送赛道记录请求,也没有租用赛道专用时段。纽北赛道在本赛季已经被完全预订,特斯拉在未来几天无法进行创记录圈速测试。
特斯拉发言人赶紧澄清:特斯拉已经向纽北租用了 Industry Pool,我们的请求已获纽北运营方确认和签约。
那就是说 Model S 出征纽北剧情反转咯?
这里的 Industry Pool,其实是纽北供车企和零部件供应商进行原型车测试和改进的场地,因为有大量的测试车和工作人员出入,所以这里是禁止刷圈速的。最多在交通条件允许的情况下开一开快车,但全程全速跑一圈儿是不被允许的。
Elon 带着车和人跑到纽北使劲儿造,到底会造出什么结果来呢,我们拭目以待。
看到 CEO 怼保时捷,用户心里都很不爽。因为从 2018 年 9 月 V9 推送算起,特斯拉 Autopilot 第十个版本 Autopilot V10 已经研发了整整一年。
一位车主开门见山:V10 啥时候推?Elon 顾左右而言他:看起来不错。智能召唤趋近于完美。免下车剧院模式、Caraoke & Cuphead(新增游戏)非常棒。也就是说,除了发布时间,一切进展顺利。
很明显,已经没用户愿意听他画饼了:距离早期用户计划大规模推送还要一周?Elon 这会老实了:正在合并代码分支,本周会推送一个 QA 级(质量保证,大规模推送前的最后一个版本)版本,希望一周后能大规模推送。
插科打诨结束了,让我们来认真的聊一聊 Autopilot 的进展。
为什么说 V10 备受瞩目呢,V8 在特斯拉自主研发软硬件的基础上完成 L2 级核心能力的构建,V9 推出了 Navigate on Autopilot,在 ADAS 地图支持的高速道路上,最新版本的 NoA 支持流畅的高速驶入/出,无需确认自行打灯变道。
虽然 V10 还没有发布,但从越来越多的更新了早期开发版本的用户测试图片来看,特斯拉正在尝试进行视觉感知方面的新突破。
首先是新模型的支持,目前 AP 支持识别行人、自行/摩托车、轿车、SUV、厢货车、公交/重型卡车等交通参与物/工具,在 V10 中,Ta 将支持识别皮卡,下面是证据。

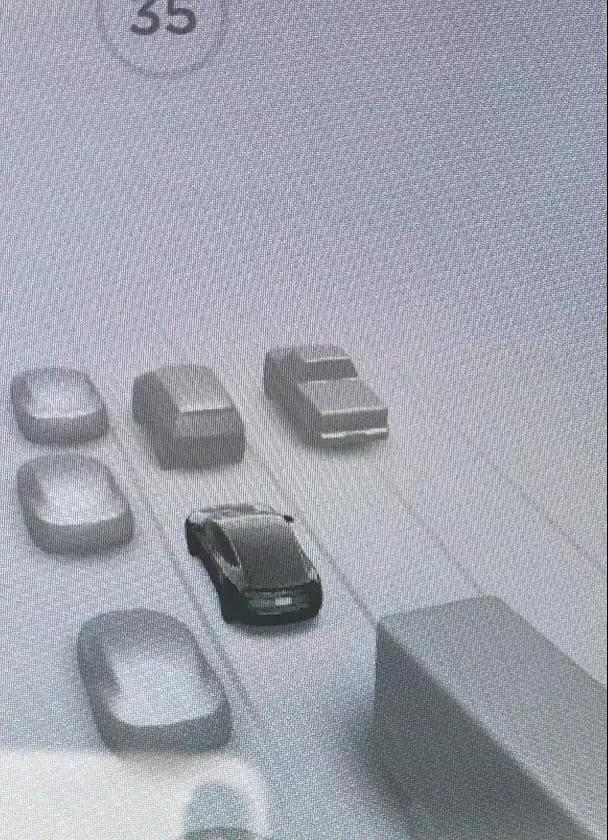
你可能会问,多识别一个皮卡有什么好吹的。
整个特斯拉 AP Vision 组,所做的工作就是通过现有的算力分析全车 8 颗摄像头传回的图像数据,从图像的深度信息中甄别出哪些是干扰物体(比如树叶、绳子、塑料袋等不影响行驶的物体),哪些是交通参与物(比如皮卡)。
每多支持识别一种交通工具,AP 对现实世界的理解就会变得更准确。皮卡是 V10 版本中发现的第一个新模型,是否还支持了别的新车型,还要等到正式发布再看。
关于 AP 的第二个问题,是 V10 在 HW 2.5 (Hardware)和 3.0 车型上的区别。先来看看下面两张图。

中间隔着至少一米宽的路岛,最新版本的 AP 依然识别出了对向车道的 4 辆车。

在大型交叉路口,除了右后、左边和左前方位的三辆车,AP 准确地识别出了正前方正在转向的轿车和校车,并在屏幕上给出了转向角度。

这张虽然模糊但不妨碍说明问题。在最新版本的 AP 中,整个环境显示信息支持 360度移动,这是移动后的图像。从蓝色引导线可以看出,最左侧的这辆车实际上位于 Model 3 的左前方,而剩下的 5 辆车,尤其是远处的四辆车,全部是通过后置摄像头来识别的。
可以确定的是,这些车辆已经全部搭载了 HW 3.0 硬件。
对于对向车道上中长距离车辆的识别,意味着特斯拉已经将前置三目摄像头全部启用;而对后方大量车辆的识别,意味着后置摄像头也已经处于全分辨率工作状态。
这与 HW 2.5 硬件驱动下的 AP 表现是截然不同的。由于驱动特斯拉 HW 2.5 的计算平台英伟达 Drive PX2 的限制(视频端口只支持 6 路视频的实时感知),特斯拉不得不阉割了前置三目中的长距摄像头和鱼眼摄像头,仅启用了左右两侧的 4 颗和前置的主摄像头、后视摄像头。
即便如此,由于算力不足,只有前置主摄像头支持实现了全分辨率输出,剩下的 5 颗摄像头全部降低分辨率输出。在这样的前提下,想要实现上图中对侧前方、后方大量车辆的识别是非常之难的。
更大的可能,是 AP 在 HW3.0 充沛的算力支持下,已经全面开放了 8 颗摄像头全分辨率感知的支持。
2019 年下半年以来,大众和特斯拉对 Autopilot 的认知进一步割裂。在很多特斯拉车主看来,FSD(自动驾驶能力)遥遥无期,选装 FSD 选装包是完全不必要的。
另一方面,特斯拉开始在销售层面与消费者进行微妙的博弈。
3 月 1 日,特斯拉重新划分了 Autopilot 的功能范畴,将基础的 L2 级功能作为标配;将包括 NoA 和智能召唤在内的所有功能都划入 FSD 选装包。
4 月 22 日,特斯拉召开投资者会议,发布了硬件的最后一道关卡 FSD 芯片。
就在 AP 功能重新划分后,FSD 芯片发布前,Elon 突然在 Twitter 上说 FSD 价格将会大幅增长,这所有人都感到一头雾水。
在那之后,Elon 进一步说明了定价逻辑:FSD 选装包价格将与技术进展进行强绑定,每新增一个功能推送,FSD 价格就会上涨 1000 美元。
Elon 相信用户最终会选装 FSD 选装包。
因为即便不是功能形态不是 FSD,HW3.0 驱动的 AP 仍然拥有更强的计算能力、更丰富的感知细节,Ta 对安全性和便利性的提升并不是非要 FSD 功能落地才能体现出来的。
比如说,以 NoA 功能为例,目前版本的 NoA 在执行自动辅助变道有时会犹豫不绝,因为在你打好转向灯后,系统有可能无法明辨侧后的道路情况。但如果是 HW3.0 驱动的 AP,对周边环境会有更准确的理解,在包括自动辅助变道在内的很多场景下都会有更高效率且安全的表现。
更强的感知和决策能力会体现在系统运作的方方面面,随着时间的推移,选装 FSD 选装包的用户和未选装的用户的系统边界能力会分化出越来越明显的差异。
所有的差异,从 HW3.0+V10 开始。
来源:第一电动网
作者:42号车库
本文地址:https://www.d1ev.com/kol/98918
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!








 京公网安备
11010502033163号
京公网安备
11010502033163号