曾经广受推崇的特斯拉,正在走下神坛。因为该减速时突然加速、莫名其妙地急刹车、追尾、“撞墙”、死机、断轴等问题频发,一些被“伤透了心”的特斯拉老车主开始“粉转黑”......
种种对特斯拉的不满情绪,在车主论坛和微信群里汇集、交换、发散......
车主怒了
“特斯拉自动驾驶追尾了,希望能找专家分析一下原因。”此前,《建约车评》收到一位特斯拉用户T先生的留言。随后,《建约车评》对此展开了调查。
T先生向《建约车评》描述的事情经过是这样的:
事发前,我开着长租的特斯拉Model S -75D去某医院接人,当时,由于车辆开启了ACC(自适应巡航)功能,我就只用管方向盘,不用操心刹车和油门。
在一个十字路口,我手动打方向盘准备并入左转道,ACC设置的时速是70(公里),变道时速度降了下来。左转道正处于红灯状态,前面三辆车都停着等红灯,这时,特斯拉本该刹车停下来,可它非但没有减速,反而突然自动加速,结果就以60公里的时速撞上了前面的一辆观致,特斯拉与前车均被严重损坏。
事故导致前车尾部受损,定损1.3万;特斯拉多处受损,定损15万元。
“如果是人开车,肯定不会在前面有三辆车都在等红绿灯的情况下还踩油门啊,应该减速才对啊,没想到一开启自动驾驶模式就出错了!它突然加速,我自己再想踩刹车就来不及了(当时,特斯拉距前车仅30米)。”
“整个过程,我始终手没有离开过方向盘,结果还是出事了!”“自动驾驶,你不帮忙可以,但你不能添乱啊!”回想起这次事故,T先生非常愤怒。
事故频发
以特斯拉车主为目标用户的自媒体“爱特汇俱乐部”曾发起过一个话题,不知你的车是否也有这个问题(自动驾驶、无法识别静态障碍物等)?
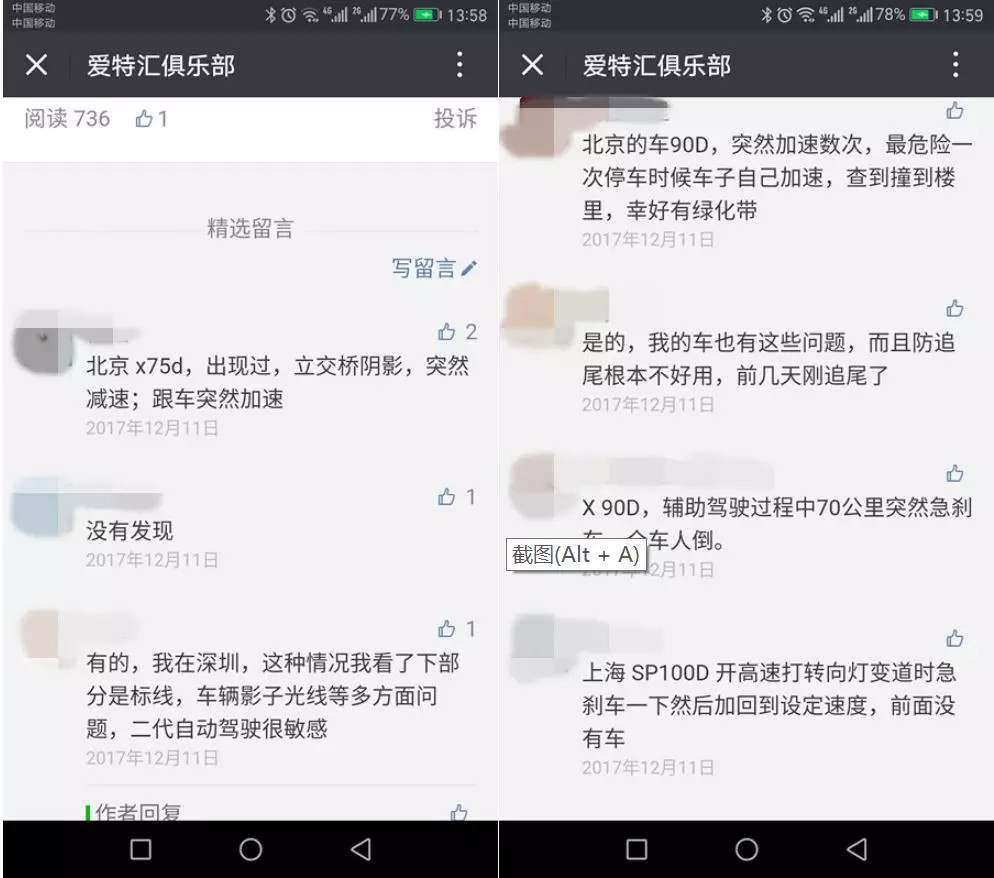
结果,不少用户反映,他们不仅遇到了这两个“常规问题”,而且还遇到了一些“冷僻问题”——
1.)Model X 90D(Autopilot 2.0):自动辅助驾驶,遇到一次弯道时突然加速,急刹车漂移,导致左前侧撞毁,维修两月,维修费十万(上海车主);
2.)Model X90D:突然加速数次,最危险的一次是停车时候车子自己加速,差点撞到楼房,幸好有绿化带(北京车主);
3.)Model S P100D:开高速打转向灯变道时急刹车一下然后加回到设定速度,前面没有车(上海车主);
4.)Model X 75D(Autopilot 2.0) :立交桥阴影,突然自动减速;跟车突然加速;
5.)ModelX 90D:辅助驾驶过程中在时速70公里下突然急刹车,全车人都倒了;
6.)Model S 75D:高架上前方无车辆时突然猛减速,左侧是轻轨站,有一辆轻轨开过去;
7.)防追尾根本不好用,前几天刚追尾。
关键词:突然加速、突然减速
T先生十分不解的是两个问题:为什么变道时会自动加速;为什么没有识别出前面的障碍物(正在等红灯的车辆)? 他找一位曾经在特斯拉做过销售的朋友咨询,对方的解释是:特斯拉使用的毫米波雷达,对静态障碍物的识别能力比较差。
随后,《建约车评》在百度输入”特斯拉追尾“及“静态障碍物“等关键词,发现了一个”神奇的现象“——除2016年1月在北京及2016年5月在美国那两起因”感知失灵“而致人死亡的重大事故外,可以查到的关于特斯拉自动驾驶模式的”负面新闻“,基本上都跟”静态障碍物“有关——
1.)2016年11月,在温州发生了一次特斯拉事故,自动驾驶模式下的特斯拉Model S撞3个高速公路隔离水泥墩。对此,特斯拉4S店给出的解释是“对静态的障碍物无法识别”。
2.)2017年3月4日,在义乌,特斯拉Model X在自动驾驶模式下撞到了前面正停下来排队等红绿灯的货车。特斯拉车头严重变形,前轴也几乎报废。定损10万。(但特斯拉官方后来发布声明称,车辆在出事前并未开启自动驾驶模式。)
3.)2017年底,杭州也发生了一起特斯拉在自动驾驶状态下在高速上连撞6个石墩(修路,一段高速被用石墩围起,车未识别出来)的事情。未看到官方解释。
2017年12月23日下午,《建约车评》在北京姚家园中鑫之宝的特斯拉授权钣喷中心看见了至少4辆因追尾而前部严重受损的特斯拉Model S。这证明追尾对特斯拉来说确实很常见,而且,特斯拉是“后车”,是事故责任方。不过,并不确定,这些追尾是否都是在自动驾驶状态下发生的,以及在追尾时前车是处于行驶状态还是静止状态。

Model S的用户手册里面有一段话:“交通感知巡航控制系统可能不会为避让静止的车辆而刹车或减速,尤其是在这种情况下:你正在以超过每小时80公里的速度行驶,在你前面的汽车变道后,你面前突然出现一辆静止的车辆或物体。司机要始终注意前方的道路,随时准备好采取紧急纠正措施。完全依赖交通感知巡航控制系统可能会导致严重的伤亡事故发生。”
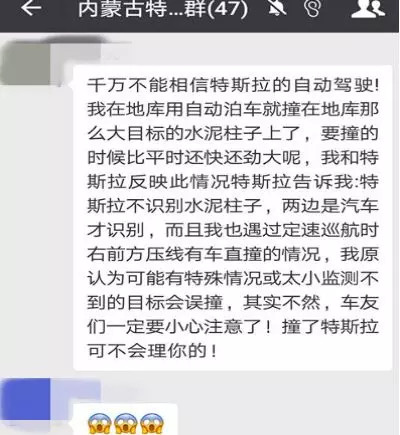
截图来自特斯拉内蒙古车主群
总体上,除去那两次著名的致命事故外,特斯拉因自动辅助驾驶系统失灵而发生的事故,主要集中在这三个点上:突然加速(导致追尾),无法识别静态障碍物(石墩,停止的车辆),突然减速(自动刹车)。
官方回应
特斯拉方面在查看后台运行数据后作出的解释是,车辆在追尾前的状态并不是“自动驾驶”,而是“TACC”——主动巡航,其它家公司叫ACC,特斯拉叫TACC。相比传统的ACC,TACC对路况的识别和判断能力更强。
TACC功能开启后,车辆可以根据前车速度改变而调整车速,如果检测到前车,并且速度慢于本车,TACC会控制电机扭矩,与前车维持一个利用时间换算的合适距离;当车辆监测到前方不存在障碍物后,会自动调整车辆到驾驶员预先设定的速度。
这一句话特别值得注意:TACC会自动调整车辆到驾驶员预先设定的速度。
据T先生的描述,事发前,他自己开启了TACC,并将时速设定为70(公里),只不过在变道时速度降低了(60以内)。那么,T先生之前多次不满的所谓“自动加速”,实际上就是指车辆在减速后从“60以内的某个值”加速至70这个过程,遗憾的是,加速尚未完成,只加到60时就追尾了。
假如没有发生追尾,车辆在按照TACC的规则加速至70后继续向前行驶,则T先生肯定会觉得“一切正常”,他压根儿就不会提出“自动加速”这个问题。实际上,这里的加速,并不是“自动加速”,而只是系统控制车辆加速至驾驶员原先“人为设定”的“目标速度”。
在准确的定义下,自动加速指的是在驾驶员未发出任何指令的情况下,车辆突然启动并加速。因此,在这起事故中,“自动加速”是个伪问题。
“源头级”的问题是,特斯拉没有识别出前面正在等红灯的车——如果识别出来了,或者前面压根儿就没有障碍物,则从“60以内的某个值”加速至70,就只是“TACC会维持驾驶员预先设定的速度”;只有当特斯拉没有识别出前面的车辆并发生事故的时候,“不该有”的“自动加速”这个误会才会产生。
此外,特斯拉Model S的用户手册特别强调,TACC“主要用于干燥、笔直的道路情况,例如高速和快速路。不能用于城区道路。”而T先生驾驶的特斯拉,正好是在城区道路里出的事故。站在特斯拉官方的角度,“我已经有言在先了,你没有按规范操作,所以,你出了事,我是不承担责任的。”
但T先生也很委屈啊。“你如果自能动检测出这里是国道、城区道路,不适合自动驾驶,就应该禁止我使用这个功能。而不是一边强调这种路况下不能用,另一方面又不阻止我启用。”
专家解读
针对调查中遇到的问题,《建约车评》还请教了清华大学计算机系教授邓志东、360车联网安全实验室主任刘健皓、地平线创始人余凯、主线科技创始人张天雷、Innovusion创始人鲍君威及禾赛科技创始人李一帆等多位业内专家,得出的结论如下:
1.静态障碍物无法识别
对车主及“用户手册”里面提到的特斯拉经常无法识别静态障碍物的问题,余凯、李一帆等业内人士的解释是,毫米波雷达是基于多普勒效应(当发射源与接收体之间存在相对运动时,接收体接收的发射源发射信息的频率与发射源发射信息频率不相同),如果没有相对速度,检测是比较难的。
但邓志东教授的解释则与此不同。“所谓静态障碍物只是相对于路面是静止的,相对于后面的自动驾驶汽车,它仍然是相对运动的。不管使用摄像头、激光雷达还是毫米波雷达,任何传感器的测量都有噪声,更何况自动驾驶汽车本身还存在着导航误差。靠这些去实时估计前方障碍物的速度是否为零或是否静止,实际是不可能完全准确的。“
邓志东认为,与人类驾驶员、激光雷达相比,毫米波雷达的测量噪声最大,对运动参数的估计最不准确。“由于动、静态障碍物判断不准确,当运动参数估计出现较大误差时,就很有可能触发非正常的‘在该减速时突然加速’现象。障碍物检测与运动参数估计算法目前还不成熟。”
李一帆、鲍君威和张天雷均认为,如果加上激光雷达,“探测失灵”的概率将会大幅度下降。
根据李一帆的解释,雷达/激光雷达的探测能力受波长影响很大,波长太长的话,探测性能就会受到制约。通常,激光雷达的波长是nm级,而毫米波雷达的波长则是mm级。
鲍君威说,根据他们做的多次试验,“可以确定的是用激光雷达,尤其是Innovusion图像级的激光雷达Hi Def,静态动态我们都能探测到障碍物在那,即使不能认出具体是什么东西,但也知道它在那,不会让车撞上去。”
张天雷认为,特斯拉要从L2过渡到L4,激光雷达是必不可少的。“在L4的整体架构下,高精地图、多传感器融合、智能决策等等模块结合在一起,就会避免很多这些问题。”
事实上,特斯拉应该也早已意识到了这个问题。尽管马斯克曾经口口声声说不会用激光雷达,但在2016年5月份的那次致命事故后不久,特斯拉就被爆出正在“偷偷摸摸地”在自己的车上装上Velodyne激光雷达搞测试呢。也有可能,用激光雷达测速,早在事故发生前就开始而已,只是当时没被发现而已。
还有一个不太引入注目的消息是,马斯克于2014年参与了固态激光雷达公司Quanergy的天使轮融资。不要以为这只是“财务型投资”。据 Quanergy 公司中国区负责人在一次论坛上透露,Elon Musk 本人经常会到访 Quanergy 位于美国硅谷的总部,并和他们一起聊自动驾驶未来的发展。
可以断定,马斯克就是在等机会,一旦固态激光雷达技术成熟并且价格也可承受,特斯拉应该就会采用。
2.无法识别石墩
至于石墩无法被识别出来,就不仅仅是因为它“静止”了,而且,还因为数据库里没有这个模型。
360车联网安全实验室主任刘健皓说:“首先要明确静态障碍物是什么,毫米波雷达对不同的障碍物的感知能力是存在差异的。检测汽车比较容易,但对石墩、锥桶这种形状不规则的障碍物,即便检测到了,由于算法的数据库中没有对应的模型,也无法显示在HMI(人机交互界面)中。“
刘健皓认为,做自动驾驶算法的多是高校和研究机构的专家,真正来自产业界的人很少。这些高校里的人虽然能做出很优秀的算法,但由于对具体的驾驶场景了解不够,导致在实际环境下的“障碍物数据库”还不够丰富。
对无法识别石墩、石柱子这种问题,刘健皓给出的对策是:完善模型数据库,改进算法。
实际上,数据库里没有石墩子的模型,这可能是“不了解中国国情”的车企才会遇到的问题。出事车辆Model S上用的处理器是Mobileye的EyeQ 3,但EyeQ3的模型训练多主要针对欧美路况,所以对于中国的道路检测准确度会下降也是正常。
相比之下,地平线、小鹏汽车等公司都强调,自动驾驶的算法设计“特别针对中国的道路场景”。在中国的道路上,石墩是很常见的,我们可以预测,待地平线的芯片应用在量产车上时、待小鹏汽车批量上路时,石墩检测将不再成为一个问题。
3.自动刹车
关于自动刹车,刘健皓和邓志东都认为,系统并不会无缘无故地自动刹车,肯定是传感器把它“看到”的什么东西误读为障碍物了。业界将这种现象称为“误检”。所有的自动刹车,都是由“误检”引起的。
为了对特斯拉的自动驾驶安全系统进行研究,刘健皓的团队曾经在2016年“黑进”其系统,干扰传感器的工作。当时,他们远程蔽掉一个超声波传感器,导致车上的其余11个超声波传感器也停止工作。
结果,前面明明没有车,但传感器却检测到有一辆车,强制车辆停下,急刹车;或者,在倒车时,明明后面没人,但传感器检测到后面有人,让倒车无法进行。这就是发生了“误判”。
通过这项研究,360汽车安全团队给特斯拉提交漏洞,证明了其传感器不可靠,这就有了后来的Autopilot 2.0版——计算平台从EyeQ 3改为PX 2,摄像头也由1个前置摄像头改成8个环视摄像头。
当然,即便是没有黑客入侵,误检的问题也会经常出现——被探测物体的材质特殊、形状不规则,或者是传感器的“噪声”等原因所致。
特斯拉(中国)官网上在2016年9月发的一篇文章中说,任何凹型的金属表面不仅仅会反光,更会将反射信号放大数倍,进而导致误检。“比如,一个丢弃在公路上的易拉罐,如果凹状瓶底朝向车头,就会被显示成为一个大型的危险障碍物”。
邓志东举例说,“比如,高速行驶的时候,在上下桥梁处偶尔会因路面出现的“噪声”等造成误检,以为前方出现了“障碍物”,于是就开始自主刹车。这种错误,毫米波雷达相对会更经常出现。”
与误检现象相对应的另一个问题是漏检。将漏检做到0,是自动驾驶汽车上路时所必须满足的基本指标;但同时还要将误检做到0,就相当于障碍物检测100%可靠,这是不太可能实现的。
偶尔刹刹车,虽然会让人感到不舒服,但也不至于有灾难性后果——因此,无人车就遵循“宁可枉杀千人,不可使一人漏网”的策略,可以允许误检,但决不能漏检。
误检的危害性:1.会出现一些莫名其妙的急刹车,影响乘坐体验;2.自动驾驶汽车由于误检自动刹车,如果后面是人类驾驶的汽车,而且没有及时刹住车,则前面的自动驾驶汽车便可能被追尾。
如何降低误检率?
特斯拉官网那篇文章中提到的做法是——拥有更为详细的点云数据。为了获取更详细的点云数据,特斯拉采取了以下几招:
1.)在2016年9月将Autopilot的软件系统升级到8.0版,对现有硬件进一步挖掘,让雷达可以探测到的周边物体(数量)达到以前的六倍,并且有能力在每一个物体上获得更多细节信息。
2.)整合每隔0.1秒获取的雷达快照,汇编成为现实场景的"3D"影像。(通常)通过单一影像帧,很难知道物体是移动的,静止的,或者只是反光造成的虚像;而通过比较包含车辆速度、预期轨迹信息的连续影像帧,则可以分辨前方物体是否是真实的,同时预估发生碰撞的概率。
3.)通过机器学习功能标定出那些容易误导传感器(雷达)的场景,将其添加进“白名单”。
邓志东给出的两条建议是:
1.)建立数据库 把容易出现误检的场景列举出来形成白名单,以后直接“放行”。这条跟特斯拉目前的做法是一样的。
2.)多传感器融合 误检的问题,采用单一传感器是不可能彻底消除的。但采用噪声水平更低的激光雷达和摄像头进行多传感器融合,误检率会降低。
更多的“不靠谱”
除那两次致命事故及上面提到的问题外,特斯拉还有其他很多的不靠谱——
1.能探测到前面几辆车?
特斯拉(中国)官方在2016年9月那篇文章提到的Autopilot升级,“将一种新型雷达作为主传感器”,当时的说法是新雷达系统能够追踪到前面2辆汽车的行驶状况;而参与了Autopilot从1.0升级到2.0的刘健皓说,Autopilot可识别前面的5辆车。但《建约车评》在亲自体验后发现,这两种说法都有待商榷。
笔者乘坐的是一辆搭载了Drive PX 2的Model X, 当时,明明前面有3辆车,但人机交互界面上显示出来的却只有1辆!
2.车辆检测到异常,自动关闭了很多功能,车主无能为力
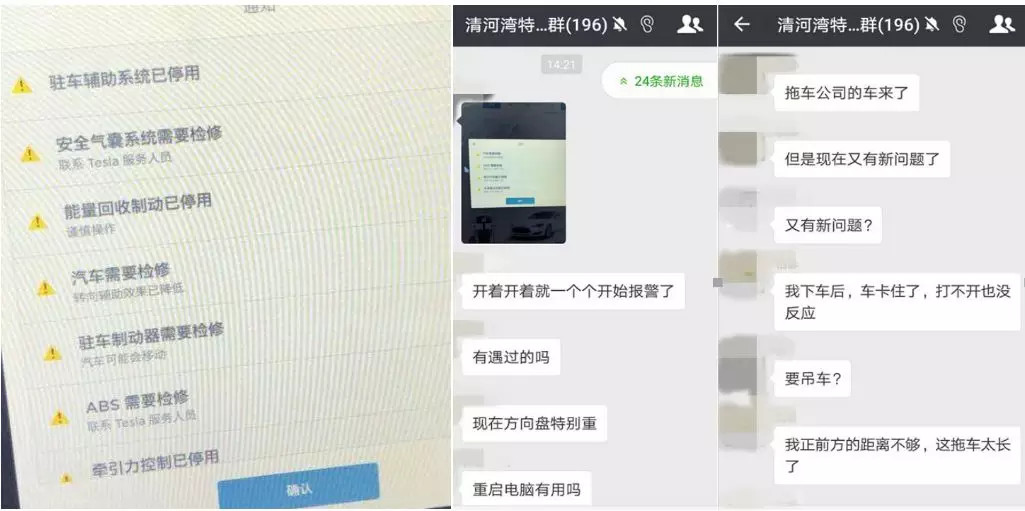
3. “无法开机”“黑屏”

注意群名称和群人数,这3张截图来自3个不同的车主微信群
4.没法开门(与自动驾驶功能无关)
注意群名称和群人数,这2张截图来自2个不同的车主微信群
5.断轴(与自动驾驶无关)


该图来自汽车之家/Model X论坛
维修至少2个月,保养得排队20天
问题频发只是一方面,让诸多车主难以忍受的是,在遇到问题后,特斯拉的服务也很难让他们满意。如有车主在汽车之家上Model X论坛里面反应的,车在断轴之后他,他一直跟特斯拉方面耗了4个月,内容还是没有得到解决。
T先生向《建约车评》反映,他在2017年春节期间开特斯拉出了事故,修了四五个月。“修完之后我又挑出了10个毛病。然后,检查还有问题,又补修两个月,百万元级的车啊,你提供的这叫什么服务?”
T先生交给特斯拉钣喷中心(姚家园店)维修的车辆,最快也要到2-3个月后才能拿到;要做保养的话,预约排队也得等10-20天。保养得等十几天这个说法,也在微信群里得到了印证。
北京周边的一些城市也有人买了特斯拉,但特斯拉并没有在这里设服务中心,因此,车主只能把车开到北京做保养。有一次,一车主大清早就从河北开到特斯拉北京亦庄店,但直到晚上才轮到他。“难道开100万元的车的人,时间就不值钱吗?”
不过,当《建约车评》以“特斯拉 服务 时间”为关键词去检索时,却搜出了这样一则老新闻:2014年12月,时任特斯拉全球副总裁、中国区总裁吴碧瑄特别强调:“我们可以事先把客户需要的配件或其他的准备好,客户一来,我们马上就可以换。因为我们大部分零件也是要换的,因为它是电子设备,没有太多维修的概念,95%的美国客户都是当天就可以把车开回去了,所以它维修的时间会非常短。”
现在,终于打脸了。
特斯拉方面提供给《建约车评》的一份资料《快速 便捷 革命性,特斯拉领先的服务模式》里面也明确写着“车主在前往服务中心的路上,特斯拉便可以初步判断车辆问题所在,帮助用户节省等待的时间。”但遗憾的是,实际的维修和保养,并没有做到“帮助用户节省等待的时间”。
《建约车评》在向一位特斯拉前销售经理咨询后了解到,特斯拉维修周期长的关键原因是,很多核心零配件都没有备货,需要从美国进口。
当《建约车评》向特斯拉方面追问为什么保养得这么长时间时,受特斯拉委托的第三方公关公司人员的回应却是:“特斯拉没有传统意义上的车辆保养,速度都很快。所以,我们的这个用户说的保养指的是什么呢?”在听到这个问题后,T先生则暴怒:“这是一个很弱智的问题,你问她2万公里一次的算什么?” (特斯拉官方提供的资料里面有一句“建议每年或每 20,000公里进行一次全面的检查和保养,以保证您的车辆始终符合最佳性能标准”。)
一位资深特斯拉发烧友分析说,保养需要排队的时间长,与特斯拉的服务中心数量太少有关。
目前,特斯拉在北京有亦庄和来广营2个服务中心,5个钣喷中心,但钣喷中心只做维修,不做保养,因此,跟保养有关的,就这2个服务中心。要判断2个服务中心是不是太少,得结合车辆的保有量来看。
特斯拉在北京及卫星城(因为周边城市的车可能也需要开到北京做保养)的保有量是多少?这个问题,特斯拉官方拒绝回答,他们说特斯拉只公布全球销量。《建约车评》根据可查到的资料做了个粗略的估计——
第一电动网在2017年5月份做了一统计,说“自2014年入华以来,特斯拉共累计向中国客户交付了2.12万辆车。从地域分布上看,特斯拉29%的销量流向了北京,24%销量流向了上海,19%的销量流向了广东。“推断可知,截止今年4月份,特斯拉在北京和上海的保有量分别为约6150辆和约5090辆。
2017年前1-9季度,特斯拉在中国卖了1.36万辆,如果粗略估计4-12月份的销量也与此相当的话(在此期间,Model 3尚未开始交付),截止2017年12月,特斯拉在中国的总保有量应该在2.98万辆左右。其中,京沪大约分别为8640辆、7150辆。粗略估算,平均每3000-4300辆车共享一个服务中心。
我们从市场调查公司Dass-Auto拿到了ABB(奥迪、宝马、奔驰)三个豪华品牌在京沪两个城市的保有量,再结合它们在两个城市的4S店的数量,做出以下表格。

比较后发现,以现有的车辆保有量来说,特斯拉的官方服务中心并不能算“太少”。
有一种说法是,ABB的车辆可以到第三方公司的门店里去做保养,对官方4S店起到了分流作用;而特斯拉的车辆则只能到它的官方服务中心做保养,因此,才显得拥挤。 这个说法是可以成立的,但它对“保养排队时间长”这个问题有多大的影响,就不得而知了。
针对用户吐槽的保养问题,特斯拉计划接下将移动服务Mobile Service带到中国,直接“上门”车主家中或办公室进行必要的维修。此外,如特斯拉车辆是因产品自身问题在特斯拉服务中心进行维修,特斯拉还会为用户提供Model S/Model X作为代步用车。想法不错,至于在执行中会不会打折扣,就不好说了。
死忠粉反水
在这次调查中,我们还发现,不少用户对特斯拉正在“粉转黑”。
1. 咱有了XX,谁还稀罕它啊?
如前文提到的T先生,曾经狂热迷恋过特斯拉,三个月前,他在跟《建约车评》聊起开特斯拉的体验时还很兴奋,但在这次追尾事件发生后,他则吐槽:“你还自动加速,你咋不自动起飞呢?!”“连最基本的安全和服务都提供不了,还整天在吹高大上。“
T先生说:传统车企还是很谨慎。奥迪A4,那个破定速巡航,操作起来特别复杂,启动时就30脉,想定到100脉,你得自己去调。体验这么差,就是希望你尽量少用——这个功能有风险,不好用,你只要知道有这么个功能就行了。出了事,奥迪当然有一万种办法把自己的责任撇清,但作为负责任的企业来说,不会放任。“相比之下,特斯拉实在太激进了,就是为了积累数据。可是,你让车主拿命来帮你跑数据吗?”
”出了事,我们这种小车主,去找特斯拉的客服,人家根本就懒得搭理我们。也该收拾收拾它了,咱们已经有XX了,谁还稀罕它特斯拉啊?““特斯拉积累的负面已经足够多了,如果处理不好,足够将它埋葬。”
T先生预定了某国产高端品牌不久前发布的SUV,他的这种心理,就跟当年华为的高端机出来之后,不少果粉开始倒戈差不多。
2. 光环放大了优点,掩盖了缺点
某上市公司创始人,早在2014年特斯拉刚进中国的时候就买了一辆,他是特斯拉的种子用户,但他最近在接受《建约车评》也对特斯拉做了猛烈抨击:
1. )特斯拉其实很差,产品质量极差、售后服务极差,用户购买它,只不过是在当时还没有更好的选择而已。
2. )跟锤子手机一样,特斯拉早期用户的声音被放大了几十倍,使外界的所有判断都非常不准确。光环放大了优点,掩盖了缺点,却留下了可能无法弥补的隐患。
3. )Model X的隔音撑死几十万的水平,所有的密封条都在开裂,售后告诉你没事,但就是修不了。
4. )Autopilot 2.0一年时间没有做任何升级,到今天还远远不如EyeQ 3,却收了用户9万元。
3.前员工也“黑“它
一位后来跳槽至某新兴造车公司的前特斯拉销售经理(他自己也是特斯拉车主)说:“Tesla的售后管理很垃圾,我在Tesla做销售的时候,一天到晚被人投诉售后的事情。我们的同事也很无奈,换一个电机,要超过2个月——没有零部件。“
“ 零部件备货周期是不是有问题?同一批次的产品大规模出问题,难道不应该在中国市场上备一些电机的零部件吗?”
”等无可等的用户往往只好把气都撒在售后身上,售后就是两头受气,觉得干着没劲,所以就辞职,特斯拉已经换了N个售后负责人了。“
倘若马斯克知道他的前员工是这样黑特斯拉的,一定会”震怒“。但发脾气无济于事。比发脾气更重要的,是把这些吐槽当成有价值的建议,然后,提供真正让用户“爱得起来”的产品和服务。
保命建议
很多自动驾驶产业的从业者都有一个使命感——降低事故率,减少车祸给人类带来的悲剧。从美国国家交通安全管理局的调查来看,有自动辅助驾驶功能的汽车,事故率要低于平均水平。
特斯拉作为第一家在量产车上使用L2级自动驾驶辅助功能的汽车制造商,为降低事故率、提高驾驶安全水平做出了重大贡献。因此,它能成为诸多新兴造车公司学习的标杆。但问题在于,它的做法太激进了。
一方面,在技术层面尚有很多致命的bug未得到解决,另一方面,特斯拉为了积累数据而急匆匆地把尚不成熟的半自动驾驶功能安装到了量产车上。这样,不出事才怪呢。
我们在调查中发现的这些问题,特斯拉方面肯定也早已经从用户投诉中了解到了,事实上,它手上的bug名单肯定比本文列举的要庞大得多。特斯拉只有努力尽快解决掉这些问题,才有机会挽回老车主们的心。
此外,特斯拉也没有认真地去做用户教育,让用户百分之百地理解自动辅助驾驶功能的“正确打开方式”。
特斯拉发生过很多大大小小的事故,固然与技术尚不完美有关,但更主要的原因则是,普通驾驶员对自动驾驶的原理不了解,过于相信被销售人员夸大的自动驾驶功能、过于依赖自动驾驶系统。
特斯拉的《用户手册》里面有很多注意事项,只是,用户可能没认真看,或者,看完就忘了,结果,本该避免的事故却发生了。比如,在国道上、在人多的城市道路上开启自动驾驶模式, 事故发生后,他们可能不会对照用户手册去看“如果我操作正确,事故是否可以避免”,而是先把特斯拉批判一番。当他们去找特斯拉算账的时候,特斯拉会翻开用户手册说:你看清楚,我可是有言在先的哦。
用户当然可以指责说特斯拉的“有言在先”只是为了规避责任,可是,你遵守它的使用手册规范操作,降低事故发生的概率,要比在事故发生后去纠结于“怪谁”更有意义。
对用户来说,仔细阅读特斯拉《用户手册》,并不是书生气的“较真”,而是开特斯拉必须具备的一项“理论素养”。不仅是特斯拉,以后,当其他品牌的半自动驾驶汽车出来了,车主都需要加强理论素养,理论素养到位了,才不至于因为盲目迷信尚不完美的自动驾驶功能而导致事故的发生。
刘健皓向自动驾驶汽车用户提出了以下几大关键注意事项:
1.启用辅助驾驶时,实现一定要注意在路面上的情况。
2.在强光、逆光行驶下要注意控制方向盘和车速。
3.辅助驾驶自动转弯时,转角大于45°角时需要控制方向盘。
4.高速行驶进行车道保持功能要控制与前车车距,脚要放在刹车上。
5.跟车转弯时双手放在方向盘上,防止汽车窜出。
6.进出主辅路时,需要控制方向盘,辅助驾驶可能无法判断障碍物。
7.高速自动驾驶时必须进入正式车道。
8.高速变道时,注意前后方车辆车距。
9.要在道路条件良好的情况下启用自动驾驶系统。
10.选择合适的车辆锁定开启功能,不要跟公交车,大卡车。
来源:第一电动网
作者:建约车评
本文地址:https://www.d1ev.com/kol/61057
本文由第一电动网大牛说作者撰写,他们为本文的真实性和中立性负责,观点仅代表个人,不代表第一电动网。本文版权归原创作者和第一电动网(www.d1ev.com)所有,如需转载需得到双方授权,同时务必注明来源和作者。
欢迎加入第一电动网大牛说作者,注册会员登录后即可在线投稿,请在会员资料留下QQ、手机、邮箱等联系方式,便于我们在第一时间与您沟通稿件,如有问题请发送邮件至 content@d1ev.com。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!








 京公网安备
11010502033163号
京公网安备
11010502033163号