标准和规范,对于任何行业的发展都有重要的意义。
促进协作、提高产品质量与一致性、降低成本与风险都是它能带来的好处。
在自动驾驶仿真内容的第二期,我们带来了自动驾驶仿真行业最重要的标准之一——OpenX系列标准。
该标准来自于ASAM(Association for Standardization of Automation and Measuring Systems),这是一个成立于1998年、来自于德国的组织。当年,德国的车卖得非常惨,许多企业砍掉了自己的研发部门,但这些人并没有脱离自己的主业,他们成立一个非盈利的标准化组织,就是ASAM。
现在ASAM标准已经是世界上最被广泛认可的汽车工业国际标准之一。

而OpenX系列标准则引领了自动驾驶场景仿真测试的发展,被全球大量工具商、研发团队以及整车厂所使用,为统一仿真场景格式奠定了基础。
那么,OpenX系列标准是如何助力自动驾驶仿真技术的?
1
—
搭建虚拟环境框架
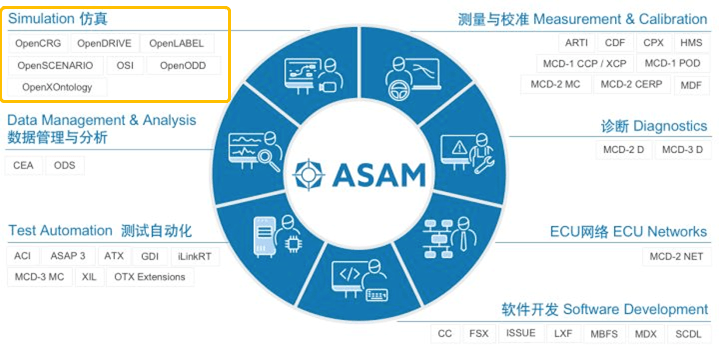
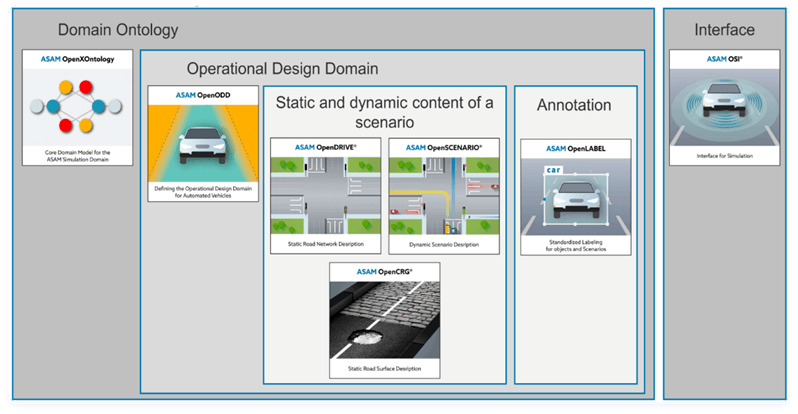
我们先来看OpenX中的X都有什么,下图就是整个OpenX体系全貌,中间的OpenDRIVE、OpenSCENARIO和OpenCRG是最早的OpenX三件套,虽然后面也有新的标准加入,但目前应用最广泛的还是OpenDRIVE和OpenSCENARIO。
在上一期的视频中,我们讲到自动驾驶仿真模块中有两个很重要的部分——静态场景模块和动态场景模块,OpenDRIVE和OpenSCENARIO就是这两个模块的对应标准。
OpenDRIVE是一种高精地图格式,2006年由德国VIRES公司发布,著名的交通场景仿真工具VTD就是这家公司开发的。2018年,OpenDRIVE的开发团队将维护工作转交给ASAM。
OpenDRIVE描述了驾驶仿真应用所需的静态道路交通网络,也就是我们常说的路网,并提供了标准交换格式说明文档。该标准的主要任务是对道路及道路上的物体进行描述。通俗地来讲,它规定了如何描述道路、车道、路口等路网中的静态元素。OpenDRIVE使用可扩展标记语言(XML)记录这些信息,并将它们存储在拓展名为xodr的文件中。这样的定义方法,使得机器可以顺利地识别并利用静态路网信息。
之后,再通过与OpenCRG结合使用,就可以将非常详细的路面描述,比如是沥青路还是鹅卵石路添加至路网描述当中,使得路面形貌更精细化,可以对车辆进行更好的动力学仿真。
对于整个自动驾驶仿真过程,OpenDRIVE非常重要,典型的仿真流程大概分为仿真前的数据准备,仿真中的执行以及仿真后的评价三个阶段。前期OpenDRIVE需要支撑后续OpenSCENARIO的编辑和运行,同时,无论是仿真运行过程中的事件判定还有事后评价,都需要基于OpenDrive地图评价体系来支撑。
OpenDRIVE中描述的路网可以是人工生成或来自于真实世界的。
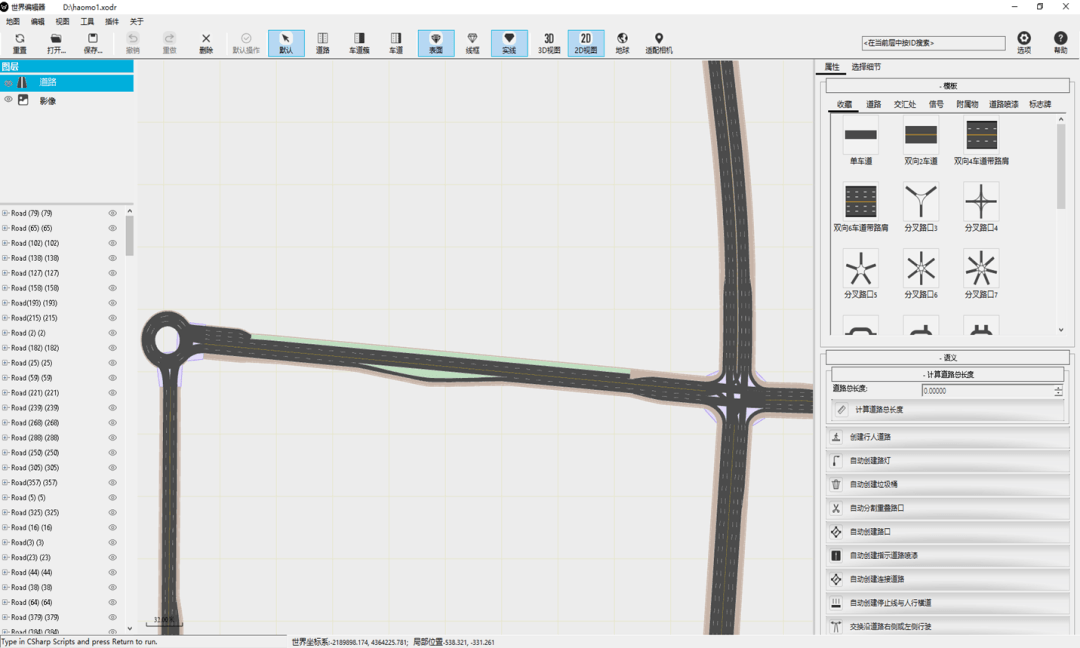
前者可以通过OpenDrive编辑器进行操作,例如51sim的WorldEditor以及类似软件。
另外也可以使用高精地图厂商的OpenDrive文件进行导入。
但这一过程中对仿真企业也会有不少挑战,首先是合规性问题,其次,相较于量产高精地图服务,为仿真运行提供OpenDrive支撑这个生意对图商来说ROI比较低,参与意愿当然也比较低。除此之外,仿真系统运行和算法运行所需地图数据同源,但格式差异大,全链路打通工作量大,不同图商的OpenDrive标准不太统一等,都是仿真企业会遇到的问题。
可以说,仿真企业对OpenDrive是既爱又恨,“爱”是因为格式定义做得非常全面,但在实际的仿真运行中,很多地方可能只需要散点地图,并不需要到OpenDrive那么高的要求,所以不少仿真企业正在把弱化对OpenDrive的依赖作为下一步的关键工作。
2
—
让虚拟世界动起来
在搭建好了静态场景后,我们需要让这个虚拟世界动起来,有参与者、有行为、有运动轨迹,这就涉及到了动态场景构建,这主要就是围绕OpenSCENARIO展开的。
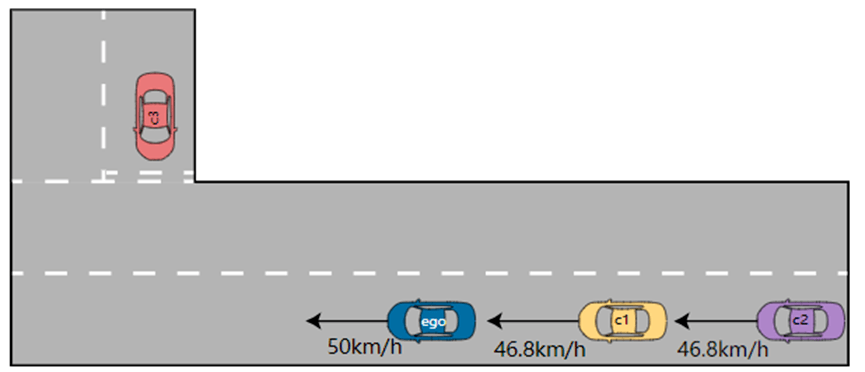
下图就是一个靠左行车国家的动态场景例子,蓝车是测试车辆, c1 和 c2 两辆是会对蓝车产生影响的车辆,c3则在路口等待右转。接下来设计的动作是当蓝车接近路口时,c1 和 c2 开始超车。c3 紧接着开始右转,从而迫使 c1 和 c2 进行紧急刹车。
OpenSCENARIO就像一个编剧,通过描述交通流、行为模式和各种事件来创造出复杂的驾驶场景,为自动驾驶汽车提供真实世界中的各种模拟环境。
去年7月,OpenScenario 2.0版本正式发布,相比之前的1.X版本,最大的差别就是增加了对抽象场景的描述。
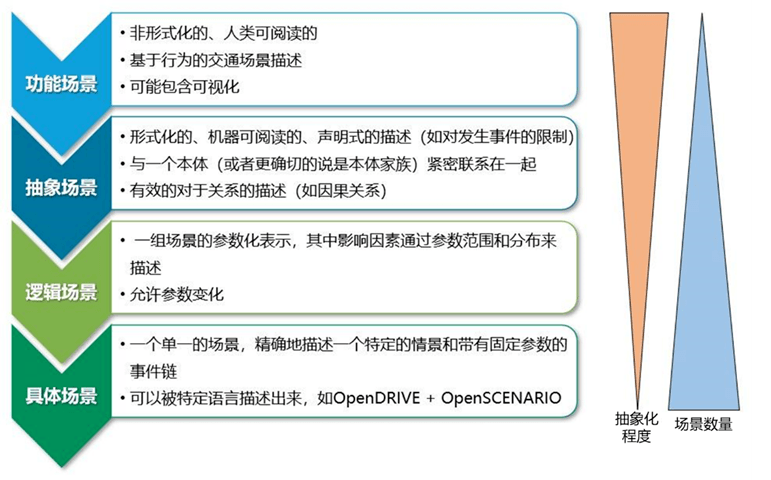
此前,场景三层抽象分级,即功能场景、逻辑场景、具体场景是行业通用的场景分级标准。但在当前的驾驶场景工程应用,尤其是在仿真工程应用中渐渐显露出它的局限性。因此之后专家就在三层分级模型的基础上,新增了抽象场景这一层级。
下图展示了场景四层抽象分级模型及其之间的关系,从上至下,抽象化程度逐渐降低,但场景数量逐渐增加。
那么,什么是抽象场景?举个例子。
现实中,我们说下个路口左转,这个信息对于司机来说是一个具体动作描述,但对于机器,这就是一个抽象场景。
因为,我们没有告诉它具体左转的轨迹、左转的速度,没有告诉它是超越前车再左转,还是老实排队等左转,对于机器,虽然左转这个目标是明确的,但实现的过程却有成百上千种不同的排列组合。
这就是OpenScenario 2.0的进化,抽象层次更高,对于一些泛化和覆盖性测试有更好的适用空间,不过目前使用更多的还是OpenScenario 1.X版本。
但无论哪种版本,能写出高效、灵活的OpenScenario场景才是关键,嵌入GPT的能力到场景编辑器中,也成为了仿真企业的一个新方向。
3
—
统一的力量
可以说,整个OpenX对自动驾驶仿真行业具有重要意义,它提供了统一的规范和标准,定义了场景、道路和车辆等关键信息的标准格式,为自动驾驶仿真提供了一致的描述方式。让不同的仿真工具和系统能够互相兼容和交互、共享和传递场景信息,实现更高效的开发、测试流程以及更准确可靠的仿真结果。
此外,OpenX系列标准还涉及到数据标注、操作设计域和感知接口等方面。它们提供了标准化的工具和定义,帮助开发人员进行数据标注、确定操作场景范围,并实现感知数据的传输和交互。
这些标准不仅仅是指导作用,更具有工程化价值,对于自动驾驶系统的训练、测试和评估非常重要,可以提高系统的智能性和适应性,让我们能够更好地推动自动驾驶技术的发展。
来源:第一电动网
作者:智车星球
本文地址:https://www.d1ev.com/kol/205075
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!








 京公网安备
11010502033163号
京公网安备
11010502033163号