两年前,小鹏开启了从广州到北京全程高速 NGP 辅助驾驶的远征挑战,最终以平均单车 NGP 行驶里程2930 公里、变道超车总次数6245 次的成绩收官。
两年后,小鹏再次发起 XNGP 全场景极限挑战——途经广州、深圳、惠州、杭州、嘉兴、最终抵达上海。
与此前不同的是,这一次小鹏的智能驾驶挑战不再限定高速场景,而是连续穿越六个城市,不分城区还是高速场景。
在这一次远征挑战上,汽车之心也参与了深圳-惠州地区的表现,比如面对智能驾驶地狱级难度的深圳区域,无论是密集车流的博弈,还是高架与地面道路的衔接,小鹏 XNGP 的表现非常流畅。
哪怕是进入无高精地图的惠州区域,LCC-L 不仅可以实现红灯停、绿灯行的体验,系统还可以根据车速、路口距离,判定是否能够在黄灯状态下快速通过路口。
简单来说,这是小鹏 XNGP 全场景辅助驾驶的第一阶段,最大的变化无疑是从过去高度依赖高精地图,到如今无图城市依然能够通过 LCC-L 作为降级后的能力补充,而这一版本也已经在 3 月底向 G9、P7i 的 Max 用户推送。
「下一个阶段(下半年),小鹏将在无高精地图覆盖的城市开放自动变道、超车、左右转的能力。」小鹏自动驾驶中心副总裁吴新宙透露道。
01、XNGP 第一阶段:有图行动自如,无图摸路直行
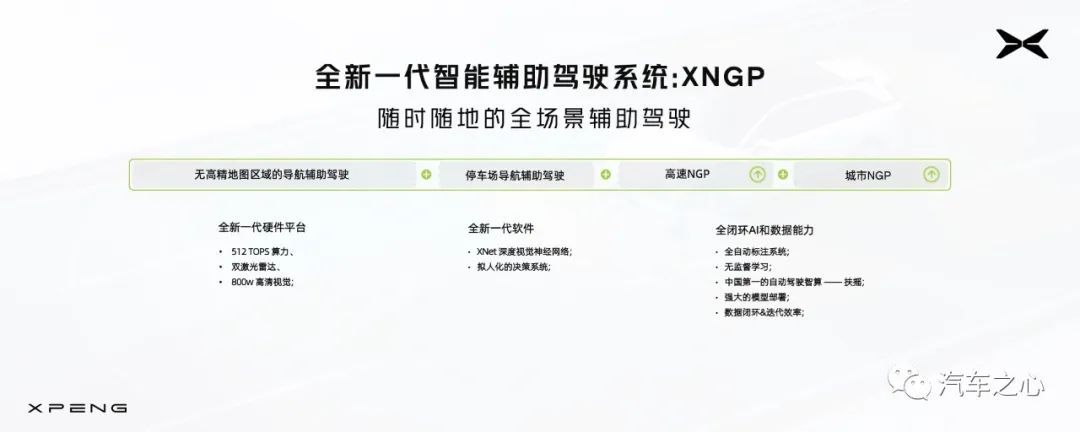
从功能定义来看,全场景的辅助驾驶能力是车企们竞争的重点,小鹏将其称之为 XNGP,即高速辅助驾驶+城市道路辅助驾驶+停车场导航辅助驾驶全场景点到点辅助驾驶功能。
从产品完成度来看,在跨越深圳、惠州两个城市长达 120 多公里的行驶过程中,无论是高速还是城区、无论是有图还是无图,小鹏 XNGP 都有飞跃质的提升。
先从有图区域开始说起。
「全程零接管」——这是小鹏 XNGP 在深圳城区长达 46 公里的智驾答卷。
正常的城区路段行驶,对于小鹏 XNGP 已经不是问题,面对施工区域、cut in 加塞变道、慢车绕行等情况,系统能够做出提前预警、灵活应对的表现。
比如以往遇到旁车强行加塞时,小鹏 P5 的反应是「见车就躲」,等到旁车加塞之后留有足够大的空间,系统才开始缓慢的继续前行,而这种过于谨慎的策略导致 CNGP 带来一定的安全风险。
相比之下,XNGP 只要监测到旁车有加塞意图,除了向左与旁车保持安全车距之外,系统还会主动发起变道,选择车流更少的车道继续行驶。
事实上,这也正符合人类司机的驾驶风格,在保障安全的情况下,更高效地完成通行。
进入高速路段之后,我们遇到了极具挑战性的场景——暴雨天气。
在暴雨天气下,雨水、前车拉起的水雾、地面积水都会极大程度影响辅助驾驶摄像头的感知识别,但小鹏 XNGP 不仅可以较为稳定地工作,并且上下匝道、变道依旧能够带来果断、顺畅的体验。2
除了暴雨路段,正常情况下的高速 NGP 已经表现出很高的成熟度,包含自动变道、上下匝道等功能,干净利落,丝毫没有拖泥带水,并没有因为安全在便捷和效率上有什么妥协。
而 XNGP 能够带来堪称「惊艳」的表现,离不开这套系统的代码重构,也就是高速 NGP 2.0 版。
小鹏智能驾驶驾驶工程师透露,高速 NGP 2.0 将会继续解决长尾问题,包括变道能力、上/下匝道能力、通行效率等方面。
最后再来看看 XNGP 无图的表现。
在不依赖高精地图的情况下,小鹏 XNGP 目前主要实现的是LCC-L(道路居中辅助增强版),能够带来红绿灯识别、启停,以及无车道线的绕行等场景。
简单来说,你也可以理解为这是无图状态下的 CNGP 初始版本。
除了自动变道、超车、左右转的场景之外,无论是视觉还是细节体验,LCC-L 都能够做到与 CNGP 一致的水平。
比如对于 SR 可视化界面,面对完全没有高精地图的道路信息,LCC-L 已经能够渲染得相当精细,包括曲率、虚实线、斑马线、停止车道线、车辆、行人等交通元素都能够以 3D 模型清晰呈现。
总而言之,通过深圳-惠州这一段行程体验,我们已经能够体验到从起点停车位到终点停车位的全场景辅助驾驶,包括停车位泊出,到城市道路、高速/快速路,再到城市、最终泊入车位的全场景打通。
这就是小鹏 XNGP 第一阶段的能力,最大的亮点无疑是「无图化」的表现。
工程师透露,目前高精地图只是覆盖了主要的城市主干道、次干道和部分支路,比如广州地区的 CNGP 高精地图覆盖率只有7 成左右,加上部分临时施工改道的情况,这些以往需要「及时接管」的场景,都可以通过支持无图的 LCC-L 作为补充。
至于下一个阶段的期待,你也可以想象这是无图状态下的 CNGP 进阶版本——实现变道、超车、左右转能力。
02、丢掉「导盲拐杖」,小鹏开始自己走路
丢掉高精地图,正成为头部公司的共识。
按照业内的说法,现阶段车辆的自动化能力,不足以让其像人类一样自由地在道路上行动,而激光雷达和高精地图——前者用于增强自动驾驶的感知能力,后者用于提高自动驾驶的规划能力。
通过这两个传感器,原本可以帮助车企快速地实现高阶智能驾驶功能,但面对地图鲜度、审核周期长等因素,关于去高精地图的议题不断被行业提及。
于是行业开始走上一条「重感知,轻地图」的技术路线,包括小鹏 XNGP、华为 ADS2.0、元戎启行 Driver 3.0、轻舟智航、大疆新一代智能驾驶方案,都是基于 BEV 感知+Transformer 模型,实现端到端的城市 NOA 导航辅助驾驶。
2022 年,小鹏汽车便明确提出,2023 年基于 XNet 深度学习算法的 XNGP 将不再依赖高精地图,并且此后在公开场合何小鹏多次重申这一去高精地图化的辅助驾驶方案。
简单理解,BEV(视觉为中心的鸟瞰图)是一种以视觉为中心的感知算法,也称作「上帝视角」,相当于把多个视角的摄像头图像,统一通过公共的特征提取器,投影到同一个 BEV 空间里面。
以 BEV+Transformer 为技术架构的智能驾驶方案,通过视觉感知为中心,激光雷达等摄像头之外的硬件起辅助,将摄像头和其他硬件采集的数据统一到一个空间进行融合,再通过 Transformer 模型大量处理数据,比如真实车道线识别、判断可行驶空间等。
通过 BEV 的辅助作用,小鹏让 XNGP 驶上了「快车道」。
今年下半年,小鹏将在国内数十个城市开放无图 XNGP 。
至于为什么还不能实现所有地区开放?——这或许与工程量有关。
吴新宙表示,中国的道路地区差异太大,不管现在已经完成动态还是静态的数据收集,想要实现功能落地至少还要半年的周期。
「每一个城市之间会存在5-10% 的差异度,比如上海的待行区比其他的城市多,但随着开放城市的增多,这种差异度会慢慢趋同。」吴新宙补充道。
举个例子,小鹏研发团队用了 9 个月的时间,开放 G9 在广州地区的城市 NGP 功能,随后不到 7 个月的时间相继开放了深圳、上海两个地区。
基于已经实现全流程闭环的 AI 和数据能力体系,XNet 可以快速实现在不同城市之间的拓展。
据了解,目前 XNet 对静态环境的输出完成了几何部分,比如识别一百米以上的地面、护栏、红绿灯、建筑等静态物体的长宽高和相对位置,但对语义理解还在提升中,包括斑马线减速、道路箭头左转、特殊车辆避让等场景。
从数据上来看,自去年 10 月 24 日以来,小鹏内部软件迭代超过300 个版本、人机交互优化超过200 次,每天积累的仿真数据超过144 万公里。
吴新宙透露,城市 NGP 的代码量是原来高速 NGP 的 6 倍,同样的场景,高速 NGP 2.0 比原来代码量多了500%。
「小鹏内部有一个非常坚定的目标,就是要把高速 NGP 2.0 做成一个非常接近 L4 的体验,这个过程会分四步走,第一步就是做到不磨蹭、不降级、不卡死、不打扰、零接管。
目前我还没有看到 XNet 的上限,还没看到我们解决不了的问题,我们非常有信心把视觉网络做到和高精地图一样。」吴新宙表示。
03、下一个赛点:AI 一定比人类司机更会开车
从场景需求来看,城市导航辅助驾驶已经成为下一阶段竞赛的入场券。
李想曾表示,2024 年有没有城市领航辅助驾驶,就像 20-30 层的楼房有没有电梯的差别,将影响用户选购中高端车的购买决策。
如果回看高速导航辅助,这项功能从过去三年间从无到有,甚至是逐渐得到用户的认可,成为智能化的标签之一,而外界也开始期待城区导航辅助能否成为新的标签。
对大步快走的小鹏而言,大规模解锁更多的城市只是时间问题。
「智能汽车下一个阶段,体验和成本是一个平衡难题,但这也是小鹏的优势」,小鹏自动驾驶产品高级总监刘毅林总结道。
一方面,小鹏强化「智能」标签:今年下半年,城市辅助驾驶 XNGP 功能覆盖全国数十个城市道路,效果会比大洋彼岸的友商特斯拉更出色。
另一方面,小鹏开始强调供应链效率,严控供应链成本:2024 年自动驾驶 BOM 成本将下降一半,实现软硬件捆绑销售转变为硬件标配。
由此可见,小鹏已经描绘出单一场景打通串联形成全场景智能驾驶的雏形了。「2024-2025 年,AI 一定比人类司机更会开车」,而这,将成为小鹏下一个非常重要的「赛点」。
来源:第一电动网
作者:汽车之心
本文地址:https://www.d1ev.com/kol/199274
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!













 京公网安备
11010502033163号
京公网安备
11010502033163号