整理 | 马一龙
编辑 | 德新

到 2022 年 6 月份,蔚来的用户使用 NIO Pilot 辅助驾驶行驶的累计里程已经达到了 4 亿 4000 多万公里,在其中使用领航辅助 NOP 的用户累计里程已经达到了 1 亿 6700 多万公里,这些数据的背后是蔚来辅助驾驶逐渐走向成熟。
蔚来自动驾驶技术的终极目标是能够提供给用户一个完全放松的点到点的自动驾驶体验—— NAD。
为实现 NAD,蔚来为这套系统配备了一套超强的传感器系统:Aquila 蔚来超感系统。

ET7 上共配备了 33 个高性能感知硬件,其中包括 1 个超远距高精度激光雷达,7 个 800 万像素高清摄像头、4 个 300 万像素高感光环视专用摄像头、1 个增强主驾感知、5 个毫米波雷达、12 个超声波传感器、2 个高精度定位单元和 V2X 车路协同感知单元,实现融合感知。
最核心的传感器就是激光雷达,来自 Innovusion 的 Falcon 半固态激光雷达:采用 1550nm 激光器,是已量产的探测距离最远的激光雷达,也世界上第一款已规模量产的 1550nm 激光雷达。
2022 年 7 月 5 日,Innovusion 实现了车规激光雷达 Falcon 第 10000 台的下线,预估装车量在 5000 台以上。
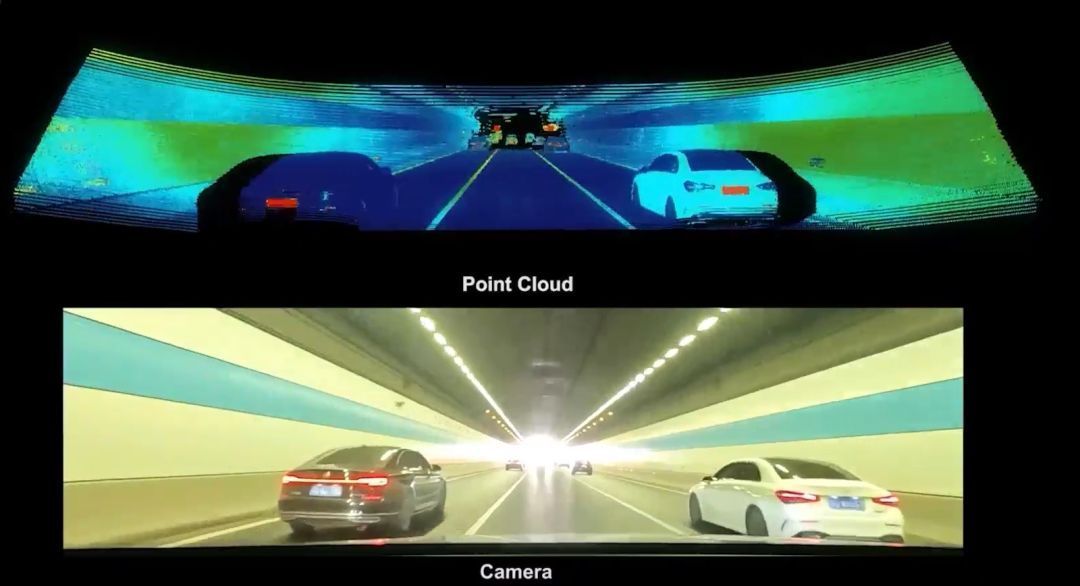
与传统摄像头为主传感器的系统相比,激光雷达在一些特殊场景感知上有优势。
比如在隧道逆光场景下,激光雷达感知不惧高亮,不惧逆光,感知的动态范围很宽,点云效果很好。
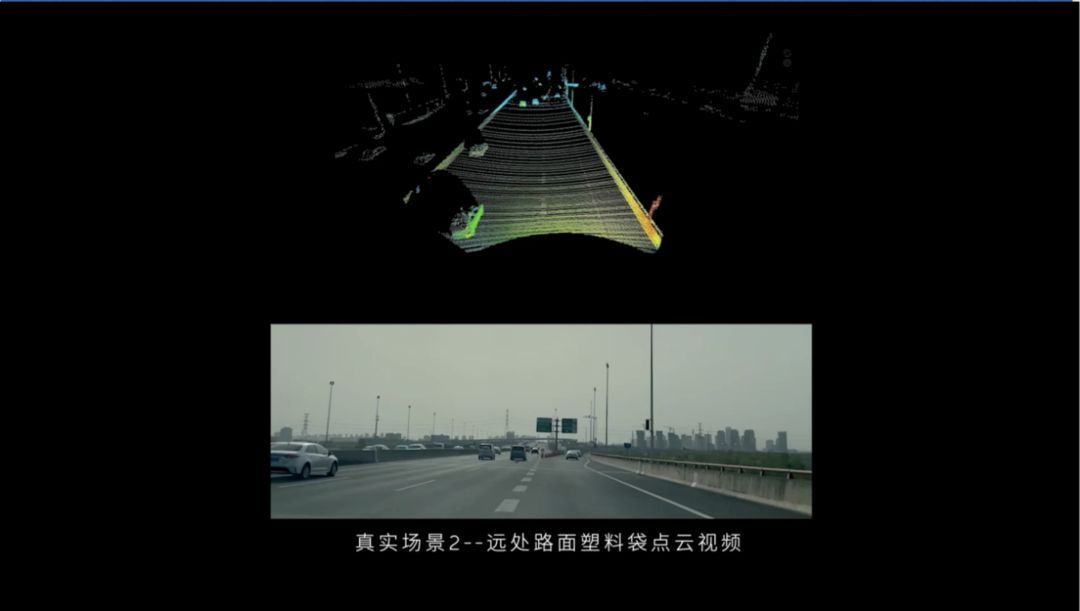
又比如对道路遗落物(如透明塑料袋)的检测,摄像头的感知效果不如激光雷达。
激光雷达具备 3D 检测能力,有深度信息,而摄像头感知是平面的,所以摄像头看不到透明塑料袋,而激光雷达可以。
在应对传感器被脏污的挑战时,摄像头受影响的程度更大,激光雷达则更小。
但这不意味着激光雷达不怕任何脏污。为了应对极端情况,蔚来也有自己的算法,用来判断脏污是否会影响激光雷达的感知效果,如果会,系统将告知用户使用激光雷达清洁套装对其进行清洁。

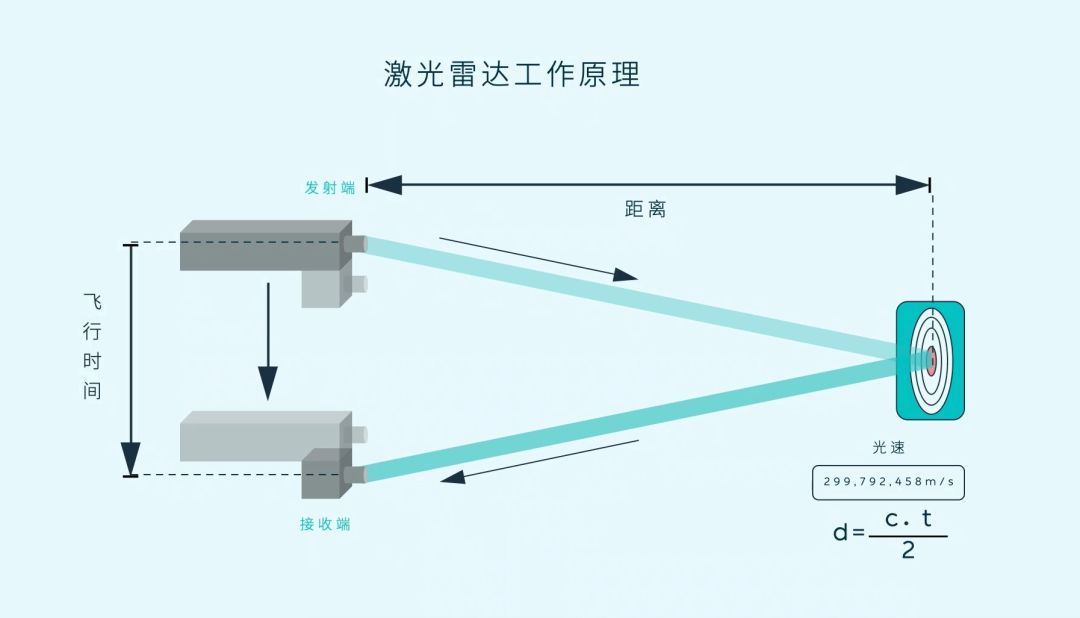
激光雷达基本上分为三部分:发射部分、接收部分、信号处理及点云生成部分。
激光雷达的发射端会持续的等间隔的发射激光束,这些激光束会去扫描正前方所需要的整个视野的区域,等间距的扫描,每一个点都会扫到。
这些光束发射到空间以后,如果在视野中的某一个点遇到了障碍物,光束就会被障碍物反射,反射到接收端,接收端收到反射回来的激光,它根据这束激光的发射时间和接收时间的时间差再乘以光速,就可以推断出来这个物体离得有多远,由于激光的工作波长非常稳定,所以测距精度是很高的。
蔚来坚定的走多传感器融合路线,也就是要坚定推动激光雷达上车。
蔚来智能硬件副总裁白剑表示:靠着摄像头来做自动驾驶,将摄像头和人眼相提并论,其实是存在误区的。
人眼和摄像头比:
人眼有很多神奇的功能,第一个就是人的眼睛和大脑可以瞬间获得深度信息,也就是 3D 信息。比如公共汽车上的人像广告,人的眼睛看前方,很清晰的就可以知道前方是一幅画还是一个真人;摄像头会识别成人,造成车辆误刹车,即使现在一些双目甚至三目的摄像头技术能够提供部分深度信息,但是距离越远就越不精确,而且在近距离情况下也做不到人眼这么好。
人眼的焦距是随时可变的,它的聚焦功能是非常强大的,需要的时候可以看全景,也可以瞬间聚焦到感兴趣的地方,而摄像头则要逊色很多。
只靠着摄像头传感器和视觉技术去做辅助驾驶或者自动驾驶,有点像小学六年级的学生和一个大学生同场竞技一样不公平。
激光雷达可提供深度信息,摄像头可提供非常丰富的二维信息,这两个结合就可以实现媲美人眼的效果,实现跟人眼相当的能力水平。
基于此,蔚来坚定地走多传感器融合路线。
ET7 上的这颗激光雷达拥有目前业界最远的探测距离:500 米(不加任何定语情况下)。
激光器用的是 1550nm 型号,支持大功率的发射,才让其探测距离能达到这么高的水平。
水平视角 120 度,看得广,基本上现在上车的主激光雷达都是这个水平(比如理想 L9 上搭载的禾赛 AT128 型激光雷达)。
这颗激光雷达的定睛凝视 ROI 达到了 0.06 度乘以 0.06 度的分辨率,据称是目前业界最好的。
综合以上的技术参数,激光雷达需要看得远、看得清以及看得稳,才能真正上车使用。
所谓看得远:
ET7 上这颗激光雷达在 10% 反射率下的探测距离可以做到 250 米。
根据激光雷达发射激光束碰到障碍物反射回来的基本工作原理,这里要引入一个概念:反射率。
障碍物的反射有一个指标叫反射率:100 分的能量打到障碍物上,如果有 10 分能反射回来,反射率为 10%,如果有 90 分能反射回来,反射率为 90%。高速公路上的标牌、指示牌反射率相当高,偏暗、偏黑的衣服或者油漆、车漆,反射率多半比较低,只有 10%。10% 的反射率在自然界是非常非常少见的,绝大多数物体的反射率都是比 10% 高。
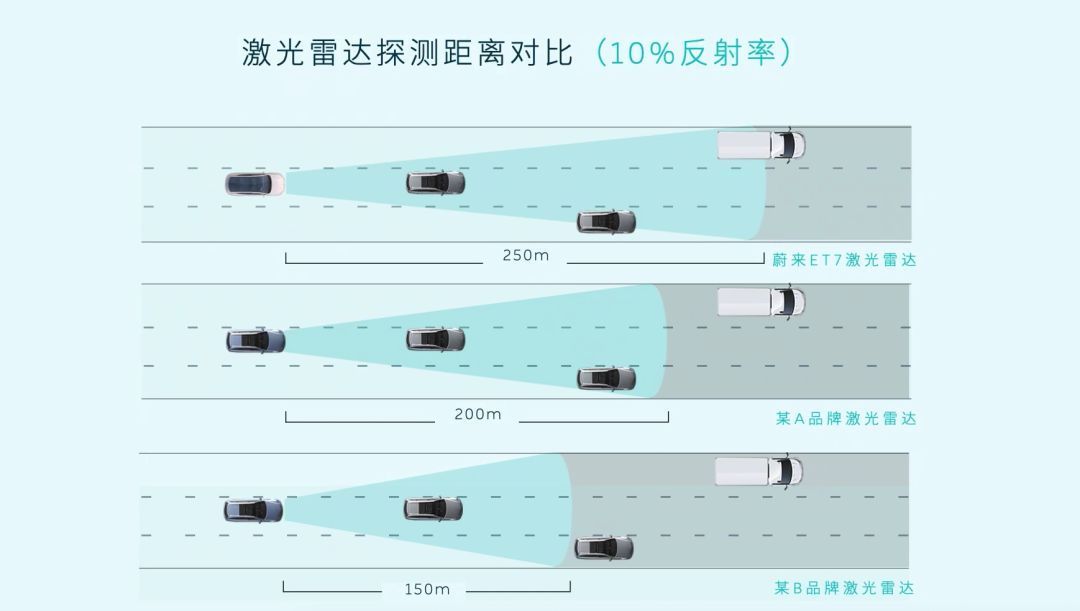
在 10% 的反射率条件下,其他的激光雷达有的探测 200 米,有的探测 150 米。蔚来 ET7 上的这颗可以做到 250 米。
所谓看得清:
其实就是指分辨率高。
激光雷达输出的东西跟摄像头有点像,是一帧帧的图像,只不过激光雷达的图像每个点都带有深度信息,是 3D 图像。
要识别一个物体,那么这个物体需要用很多像素点去表征,相同大小的物体,能够表征的点数越多,分辨率就越高,这个物体就被描绘得更加细致,自然就很清楚。就像手机屏幕分辨率越高,同样一张图就能看到更细腻、更清楚的细节。
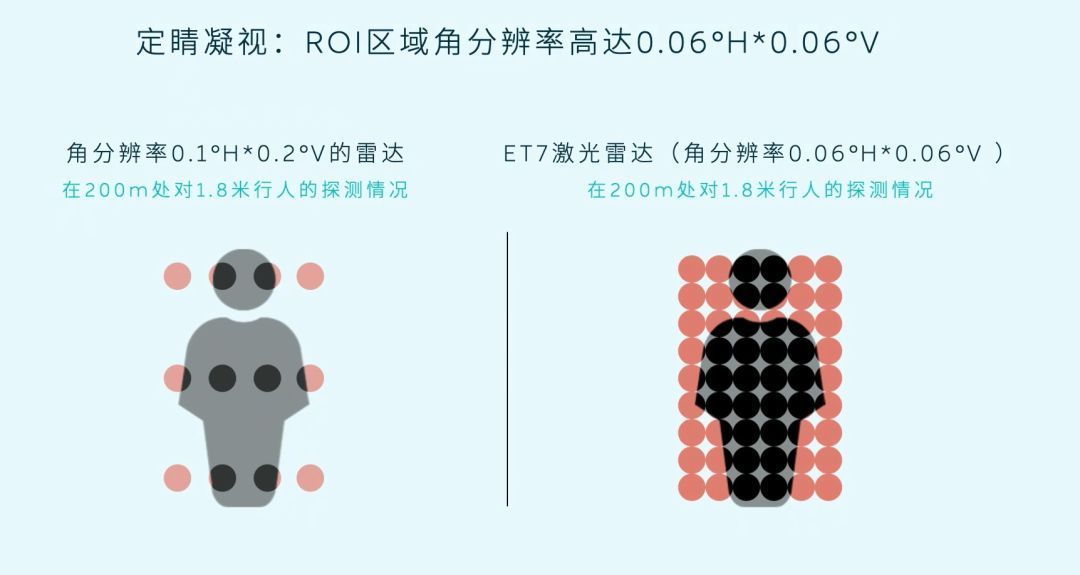
200 米处 1.8 米高的一个行人,左边这款激光雷达(角分辨率 0.1 度乘以 0.2 度)有 12 个点去照在他身上,去描述这个物体。
ET7 上的这款激光雷达是 0.06 度乘以 0.06 度的角分辨率,同样是 200 米处 1.8 米高的行人,可以看到横向有 6 个,竖向有 9 个,有 54 个点,这个分辨率比左边这款激光雷达有将近四五倍的提升。这就是所谓的看得更清楚。
这款激光雷达还有个「定睛凝视」的功能。
通俗理解就是当我们想看一个物体看得很清楚的时候,我们可以盯着看、凝视它,背后的原理就是把人眼的感光像素都聚焦到一个小的范围内。
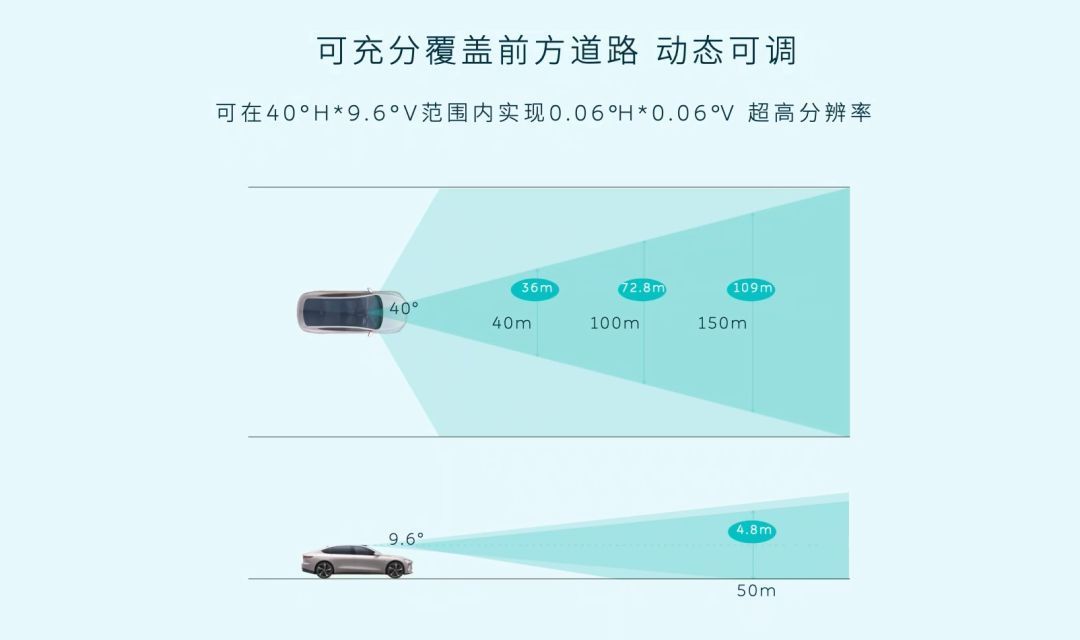
具体到参数上,这个「定睛凝视」的特性,ET7 上的这颗激光雷达在 40 度的水平、9.6 度的垂直范围内,可以实现 0.06 度乘以 0.06 度的超高分辨率。
在整个 120 度的水平视场里,这款激光雷达会对所有的物体进行扫描和 3D 建模,输出 3D 点云图像。其中在水平的 40 度的区域会有更高的分辨率进行扫描,垂直方向上也是一样的。
所谓看得稳:
关于激光雷达的看得准如何评估,这里要引入一个概念 POD,探测概率。
一束激光打到障碍物上然后反射回来,不是每一个点都能够被准确的接收。这和激光雷达接收端的灵敏度,整个系统的稳定度都有关系。比如说十万个点打出去扫描障碍物,只有九万个点回来,这就是 90% 的探测概率(POD)。
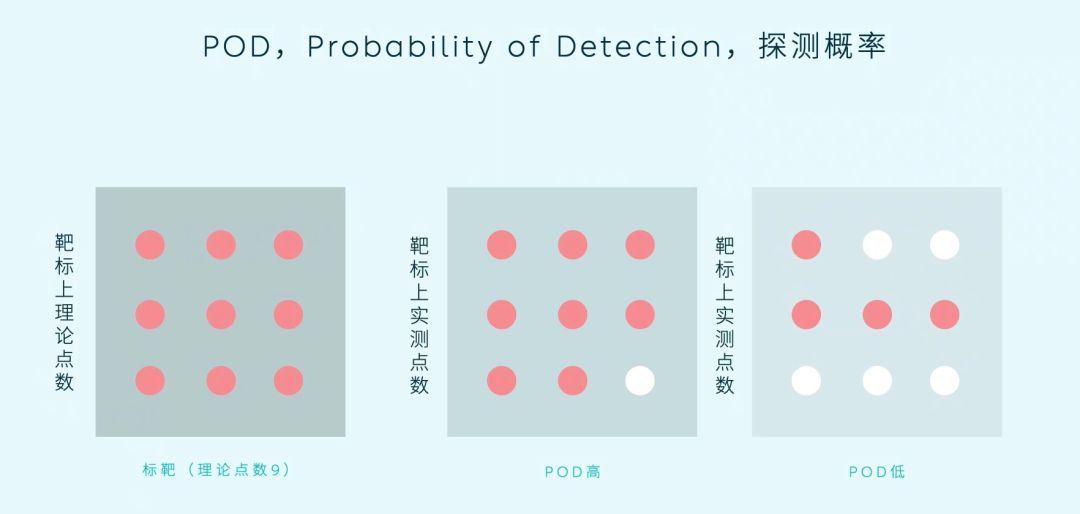
基本上,POD 值越高,实际所得的点云就越多,对同一个物体进行描绘的点数就越多。
ET7 上这颗激光雷达的 POD 可以做到 90%,在业内来说是很领先的。
蔚来 ET7 上的这颗激光雷达从立项到最终今年 3 月上车,经历了快两年的时间。
以往,汽车行业的零部件供应模式都是:Tier 1 将传感器开发好以后,交给主机厂,然后进行上车的布置、测试、验收,如果验收通过就开始量产。
这样一种模式的问题在于:
第一,从时间维度上讲,整个开发时间很长,因为 Tier 1 自己开发需要一两年甚至两三年的时间,开发完毕以后再交给主机厂进行布置、上车、认证,可能也需要几年时间。
第二,Tier 1 开发好了,主机厂如果想要做一些深度定制或者修改是很难的。既没有时间,也没有能力去做这件事情,这就很难把传感器的性能发挥到极致。
基于此,蔚来和 Innovusion 走的是联合开发的模式。
Innovusion 本身在车规级上车这一块,包括电路技术、整车的布置和车上的各种供应链等,是略有所不足的。
而蔚来一开始就强调全栈自研,强调正向开发,自研是蔚来的强项。
基于此,两家就联合开发,共同去量产激光雷达。
好处显而易见:
第一,开发周期被极大缩短,这么一款激光雷达从立项到上车不到两年时间,开发效率很高。
第二,可以把两家优势发挥到极致,在供应链、可靠性和成本方面有极大的提升。
第三,这款激光雷达为 ET7 量身定制,ET7 的风阻系数、外观和各性能指标都得益于这种定向开发,达到最佳最优的状态。
Innvusion 的 Falcon 激光雷达是半固态产品,包含了光学部分、机械部分(转镜)、结构部分、软件部分、电路部分。
据蔚来智能硬件副总裁白剑透露,蔚来其实是主导了这款激光雷达的电路设计,还参与了这颗激光雷达如何进行整车布置。外观应该怎样设计?如何与车身融合?其实是蔚来给出的方案。
正是得益于双方联合开发,合作推进激光雷达的量产上车,所以 ET7 在整个空气动力学上有非常良好的表现。即便是放在了车辆前额,有一个凸起,也没有干扰车辆风阻表现。

任何一个零部件,包括激光雷达要想上车,都要经过九九八十一难。
需要满足车规级的各种要求。
其中包括但不限于:
冲击测试。冲击测试是模拟用车过程中的各种极端用车场景,包括乡间小路、泥泞道路、搓衣板路等等,要保证其能够在车的十多年的生命周期里能够耐得住这样的环境。
在 50 个 G 的加速度下进行冲击会不会损坏,这对于激光雷达是很大的考验。
冷热测试。汽车的使用环境是多变的,极北可以到漠河,最南可以到海南岛,低温低到零下 40 度,高温可以到上百度,冷热测试是不可少的,有些时候还要进行交替,冷热交替的冲击。
除了冷热测试,还要做高温耐久测试、光照测试等等。
激光雷达还有独特的测试项目。比如说强光,太阳光中也有红外线,会对激光雷达产生干扰,那么强光下运行的好不好?在雨雾和灰尘环境下运行情况如何?都要一项一项测试通过才能量产上车。
这些所有测试,在过去的两年里,蔚来和 Innovusion 都做得比较完整。
但这是否意味着激光雷达就是一个完全稳定的传感器?有了激光雷达的自动驾驶系统就完全值得信赖?答案是否定的。
激光雷达的很多问题,一方面存在于硬件原理中,另一方面则存在于软件算法中,当然,硬件上的「硬伤」也是可以通过算法调优来解决,这就考验的是厂商的软硬件综合能力。
比如激光雷达的一些典型问题如:
拖尾:激光雷达脉冲打到前面物体的边缘时,就有可能出现部分激光脉冲打到后面物体上,导致测距不准或者陷入迷茫。
盲区「吸点」:激光雷达探测近距离物体时出现的测距不准问题被称为「吸点」。
高反「鬼影」:对于高反射率物体,进入到激光雷达视场及测距范围后,输出的点云除了在真实位置有成像以外,还容易在其它位置形成一个形状、大小类似的成像,而这个虚假的成像被称为「鬼影」。
高反「膨胀」:指激光扫描高反射率物体后,输出的点云会向四周扩散,看起来就像「膨胀」了一样。
空洞:对于近处低矮障碍物,激光雷达由远及近靠近过程中,出现的点云时有时无的丢失现象被称为「空洞」。
对射干扰:不同激光雷达之间如果靠得太近,不同雷达发射和接受脉冲容易被混淆,导致点云出现噪点。
……
以上的很多问题,在 ET7 的这颗激光雷达也同样存在,但因为这颗激光雷达采用了 1550nm 激光器,所以在某些问题上表现更优,而且通过蔚来和 Innovusion 的长时间测试和联调,大部分问题得以将负面影响降到最低。
激光雷达从开发到量产,是一个工业化的过程。
激光雷达是一个非常复杂的器件,里面有上百个零部件,电路有几百个芯片和其他的元器件,生产需要强大供应链和工厂产线。而且还要保证生产一台、一万台、一百万台甚至几百万台的一致性、可靠性都没有问题。蔚来和 Innovusion 的工业化团队合作起来克服了这些难关。
生产线方面,Innovusion 与业界知名的均胜普瑞合作,在 2021 年建成了全工业化的高性能激光雷达产线,年产能可达 10 万台。

2022 年 3 月 28 日,蔚来 ET7 开启交付。经过后续的自动驾驶功能包更新,这款车上基于激光雷达实现了 ACC(自适应巡航控制) 和 LCC(车道居中控制)功能的量产。此外,更高级别的领航辅助驾驶功能 NOP+ 将会在今年三季度开放使用。
而往后走,蔚来 NAD 的相关功能也将逐步开放,激光雷达将在其中担纲更重要的角色。
来源:第一电动网
作者:HiEV
本文地址:https://www.d1ev.com/kol/180022
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。


相关圈子


先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!








 京公网安备
11010502033163号
京公网安备
11010502033163号