文:谈擎说AI,作者:郑开车
人类颠覆未来出行的野心从来都没有被湮灭过。
在千禧年前夕的动画片《飞出个未来》中,一千年后的世界里,交通“道路”被“管道”取代,未来人类出行成为了在管道中飞行;在《第五元素》中,2263年的纽约交通,不再拘泥于“地面”,悬空的道路上磁悬浮汽车高速行驶。
影视作品外的现实生活里,今年何小鹏官宣的2024年量产“旅航者”,推动飞行汽车概念再度升温,马斯克也构想出了未来的高速地下隧道,以解决当前交通拥堵问题。
上天入地,是造车新势力大佬们颠覆未来出行的野心展露,但这番想象力无疑与实现难度成正比。纵观当前汽车赛道,针对颠覆当代交通这一课题,最多玩家布局的无疑是自动驾驶。
随着如今自动驾驶向L4迈进越来越多的瓶颈出现之际,车路协同的声音开始升温,而这真的会成为自动驾驶的最终希望吗?
到底什么是车路协同?
在百度百科上,车路协同的英文名为Intelligent Vehicle Infrastructure Cooperative Systems(IVICS),然而这个词在维基百科却是找不到的。
进一步找寻,谈擎说AI又发现了一个有趣的现象,当前网上不少提供车路协同解决方案的企业官网上,都给车路协同的英文名称定为了“V2X”。那就简单了,找一下“V2X”究竟为何意问题不就解决了?
据维基百科,V2X意思是Vehicle-to-everything(直译:车联万物),包括但不限于 V2I(车辆对基础设施)、V2N(车辆对网络)、V2V(车辆对车辆)、V2P(车辆对行人) 、V2D(车辆到设备)和 V2G(车辆到电网)。
但小擎我还是“Too Naive”,百度百科里,“V2X”意为“车用无线通信技术”,再用谷歌翻译查询一下“V2X”的释义,谷歌却给出了“车联网”的解释。
看到这里,我已经像是身处吕秀才“我是谁”这一哲学问题下无所适从的姬无命。车联网和车路协同到底谁是V2X?还是谁都不是?那他们到底是什么?
一个如今日渐升温的赛道上,连概念都能够在全网如此不具象,这不禁让人想到了像是一个筐的元宇宙概念,使得我们在有生之年看到了Facebook(改名Meta)和蜜雪冰城(注册“雪王元宇宙”商标)一同布局的魔幻现实。
其实在谈擎说AI的理解中,“车路协同”这一概念是致力于从更宏观的视角切入来实现无人驾驶,其看似对立的路线是单车智能,通过将“车、路、云”连接的方式,目的是和智能汽车作协同一起实现无人驾驶的终极目标。也因此,V2X的定义应该是更加准确的。
既然对这个词有一定理解,那再计较这个词的定义各方说法不同,颇有些缺失罗永浩老师口中的“大局观”,但其实这一词本身的定义现状,就给人了一个当前车路协同赛道管中窥豹式的初印象,即车路协同的现阶段发展正是像这个词本身一样稚嫩和模糊。
诚然,像谈激光雷达就绕不开马斯克的纯视觉路线,提到了车路协同,就不得不提一下其最广被讨论的对立面,单车智能。
如今通过单车智能路线来布局自动驾驶的玩家,可以说是从元老级的Waymo、Apollo到初创独角兽小马智行、Momenta再到车企特斯拉、蔚小理,几乎无所不包。
就像是在视觉路线上与全世界作对的马斯克,车路协同的对立阵营基本囊括了当前自动驾驶赛道上的所有主要玩家。
尽管车路协同在当前毫无疑问是一个小众之选,然而存在即有合理性,以当前车路协同赛道上较为头部的独角兽玩家蘑菇车联为例,天眼查信息显示,近年来其融资节奏虽算不上密集,但也仍有着称得上豪华的投资阵营站队。

尤其值得注意的是,今年九月,离A轮输血结束已经接近三年的蘑菇车联终于再次得到了最新的战略融资,谈擎说AI认为,这主要得益于当前车路协同路线的一个突破口已经出现,即有望冲出单车智能的现存瓶颈,具体原因我们可以进一步从单车智能中找到。
单车智能的“感知局限性”
单车智能,顾名思义,即在汽车智能化方向下功夫,用一个装在车内的智能化系统来接替传统驾驶员的工作,让汽车变“聪明”,从而实现自动驾驶。
但我们不可否认的一个事实就是,即便是天赋和资历条都拉满的人类驾驶员,也不能百分百保证可以避免车祸发生,这也反映出了单车智能终将面临的瓶颈。
谈擎说AI认为,当前单车智能主要存在以下两个愈发凸显的局限:
视野局限:
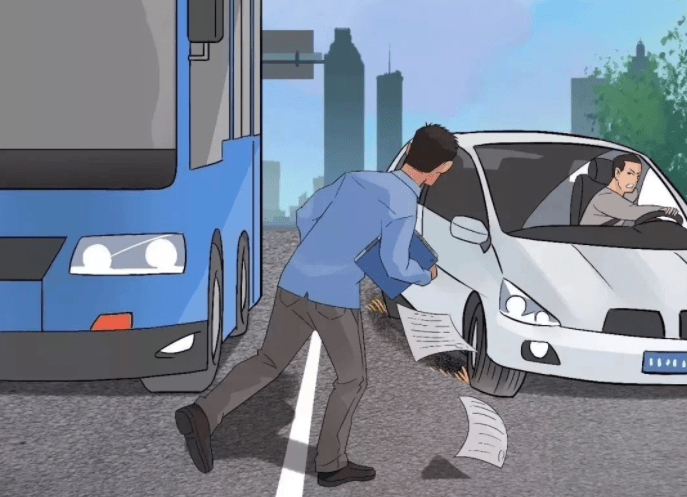
智能汽车感知硬件系统无论是摄像头还是雷达,都是基于生物感官的产物,且都搭载在车端,这就必然会有“盲区”现象存在,即便系统再智能,也仅能在视觉范围内做出快速精确的决策,这就导致“鬼探头”这样人类司机往往难避免的现象,单车智能同样很难避免。
比如对一辆高速行驶的智能汽车而言,视觉盲区内突然窜出一个物体,由于惯性的客观存在,系统无论是做出急刹还是继续行驶的决策,都很难避免事故发生。
视效局限:
当前智能汽车感知硬件往往是多管齐下,即便走纯视觉路线的特斯拉,也都搭载了一定数量的毫米波雷达,而像是小鹏P5,更是有激光雷达、摄像头、毫米波雷达。
这主要是因为环境干扰,就比如在黑夜,摄像头感知能力变差,雷达就派上了用场。然而这样的组合式环境风险规避如今也已经出现了局限性。
就比如雨雪天气,雨雪遮挡了摄像头或是雷达设备,将会在一定程度上影响到整车的自动驾驶行为决策。
不难发现,单车智能当前愈发凸显的两个问题,绝非是能够通过不断提升单车智能化程度就可以解决的,而是需要进一步弥补“视觉”这一感官层面缺陷来实现。
如何弥补呢?有网友调侃,“捅根长杆子,让视觉感知设备在周围环境里保持最佳高度,啥都能看见。”
但毕竟是调侃,一辆顶着五六米高杆子的车怎么能过隧道?真的有人会愿意购买这样一辆车吗?这样的思维模式无疑是线性的。
而从古至今任何具有颠覆性的思维往往是非线性的,就比如曾经人们嫌马跑得太慢,并不是去养出跑得更快的马,而是发明了汽车。
在单车智能出现瓶颈的当下,车路协同无疑是一个非线性解决方案的代表。
车路协同的“递进式衍生”
在和几个朋友探讨车路协同究竟能帮助单车智能解决什么问题时,一位自动驾驶工程师给我们通俗地讲述了他自己的见解:
“车企不能随意给汽车加装像机械式激光雷达那样夸张的大物件来保障汽车视野足够大,但倘若这样的感知设备是装在路边的,那大一点其实也就无所谓了。在汽车经过时,路边视觉装置所探测到的信息能够瞬间传输到汽车内,供车内智能系统做出决策,那世界上就再也没有‘鬼探头’了。”
诚然,当前的单车智能,感知装置研发其实是一定程度上在“戴着镣铐跳舞”,囿于整车体积等诸多限制,车路协同是一个存在可实现性的弥补式解决方案。
但是在事后的整理中,谈擎说AI发现了这位工程师朋友所言的完整性在于,其总结出了车路协同的四个缺一不可要素,即车端、路端、云端和传输能力。也因此,想要实现车路协同,并非在路上装感知设备就能够实现,四者能否协作发展,才真正决定了车路协同的发展前景。
尽管车路协同在理论上是可以突破单车智能“感知局限”瓶颈的,但当前赛道大部分玩家仍是在走单车智能的路线。谈擎说AI认为,这主要是出于以下几个方面的原因:
思维
我们先从思维层面来看,单车智能是一个“主观制造”思维,我想要实现自动驾驶,我自己研发,采购必要的硬件,然后自己造一个独立装置出来。这不会产生大量的协同作业压力,自己练兵,自己作战。这无疑是一个加厚企业壁垒的路线。
而车路协同则更像是“宏观协配”思维,我想要实现自动驾驶,我从公共设施切入,不需要把技术局限在一辆整车上,道路有多宽敞,我的自由度就有多宽敞。但我的研发产物同时将让所有竞争对手受益。与此同时,前期的研发、政策、法规等等破冰行动,都需要我来协调。在这条路线上,企业更像是在做“慈善”。
虽然车路协同解决无人驾驶终局问题的优势大于单车智能,但不难发现,这是一件投入产出比不明晰的事情。也因此,在蘑菇车联已经与部分城市在智慧交通领域达成合作时,广汽新能源总经理古惠南却表示,在现阶段把道路复杂化容易“劳民伤财”。
毕竟车路协同也需要单车智能化水平达到一定高度才可以实现,而且当前的单车智能规模化水平普遍仍在L2,仍有发展空间,这也是为何最早的布局者特斯拉、Waymo等在当年都纷纷选择了单车智能路线,到如今也仍在坚持做。
职责
车路协同的设备研发和制造安装成本,谁来投入?投入后如何产出?以现有认知来看,当前蘑菇车联与衡阳、鹤壁等城市已经达成了部分合作,可以说是在一定程度上解决了部分问题。
然而车路协同并非简单的两两合作就可以解决的。相关的网络、供电、运维如何保障,又由谁在后续去负责相关物业?投入颇大,产出在哪里?这些问题都是在这条路上必然需要面临的。
不难发现,车路协同不仅是需要造出更聪明的车,优化更聪明的路,而且也需要协同诸多产业。车路协同也牵扯到了诸多交通、法规要素,似乎远不是一家企业之力就能够掌控的,不仅是需要各地政府部门、电信运营商、云服务供应商等部位协同,也必然离不开国家的强干预。
这就意味着单车智能的布局往往是聚合式的,一个企业,一个项目,集中火力投入。而车路协同的布局则像是碎片式的,需要一个统一战略的制定者,当前企业们面临无从下手的困局,即便当前蘑菇车联已经与部分城市建立了初步合作,然而整个概念似乎时有点像由于单车智能“感知困境”出现而剧烈升温的。
就像曾经的Waymo估值已从最高点的近2000亿美元断崖式下跌到如今300亿美元左右。任何剧烈升温的赛道出现,往往需要用一份冷思考去看待。在诸多待攻克的难题面前,蘑菇车联们虽然给出了一个单车智能瓶颈的新解法,但真正想要落地也同样道阻且长。
规模
理论上来讲,一件产品或是技术往往需要经历了商业化、规模化之后,才能实现技术的迭代,从而进一步扩大商业化,往复循环,这是一个技术经久不息迭代的必备前提。
其实不难发现,整个汽车电气化变革浪潮里,这样的现象并不少见。
一个最明显的例子就是智能化一定是更适合电动汽车吗?答案是否定的。众所周知当前汽车变革有两个风口,一个是电气化,一个是智能化,两个风口本质上并没有什么联系,只不过碰巧在同一时空相遇。
也因此,既然电动汽车是未来的大趋势,那么智能化又何必在燃油车上浪费时间呢?随着特斯拉、蔚小理等一众玩家都将智能化搭载到电动汽车上,自然就拉动了规模效应。
回到主题,虽然车路协同一个设备可以服务众多路过的机动车,单车智能就显得前期成本更高,但做单车智能的玩家占主流就拉动了规模效应,前些年单车智能的诸多短板与高成本都在这两年被不断解决,这样的规模成本和技术沉淀优势,同样是车路协同玩家们当前所不具备的。
写在最后:
关于车路协同还有最后一个问题:既然现有认知内,光依靠单车智能基本不可能在未来实现绝对的无人驾驶,那么为何还有那么多玩家要“死磕”?
谈擎说AI认为这主要是因为单车智能的终点并非在L5无人驾驶,而是在L4自动驾驶。
关于单车智能,业内一直都有一个“攀登珠峰,沿途下蛋”的比喻,在技术不断发展的过程中,只要无法解决当前的“感知局限”,就算是单车智能到了珠峰顶也无法达到L5无人驾驶,但L4的ODD大量场景则可以打通,底层的数据积累都是可以大量在ODD场景间复用的。
因此,谈擎说AI认为,以现有认知来看,车路协同是走向L5终局必不可少的一步。但当前的车路协同难就难在“破冰”,只有单车智能走到了一个在技术、规模、成本、效能都较为饱和的位置,市场和行业的整体导向才能够进一步倒逼车路协同快速发展。
在单车仍没有那么“聪明”的今天,车路协同可能一直会是一个相对小众的赛道,我们仍需要向着L4攀峰。在此之前,蘑菇车联们也许仍需要挺过寒冬。
Ps:谈擎说AI,左拐新能源汽车,右拐智能驾驶,有深度,有温度,作者郑开车,转载请保留版权信息。
来源:第一电动网
作者:谈擎说AI
本文地址:https://www.d1ev.com/kol/162766
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!








 京公网安备
11010502033163号
京公网安备
11010502033163号