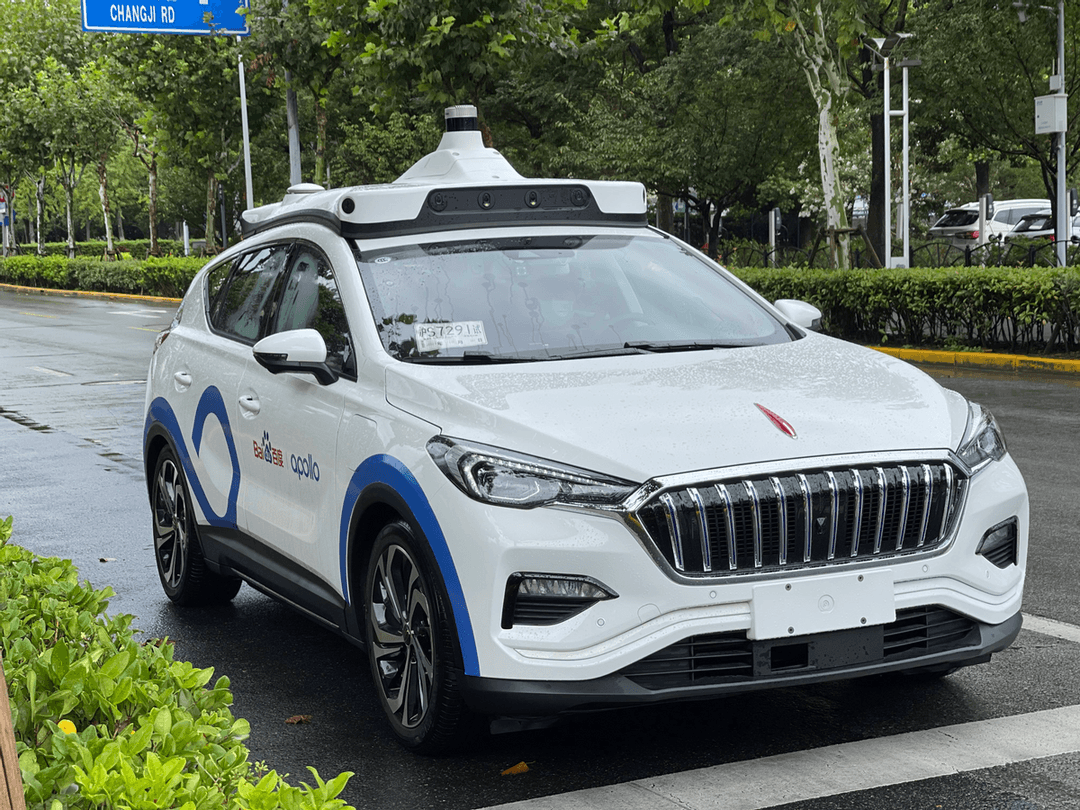
无人驾驶在过去看来都是可望而不可即的,即使现在很多车企都在宣称自己的车达到了多少级别,但是实车往往都很让人失望。要说目前真的有无人驾驶那味的车,百度的萝卜快跑算是一位了,并且萝卜快跑已经在北京开展了商业化试点服务。
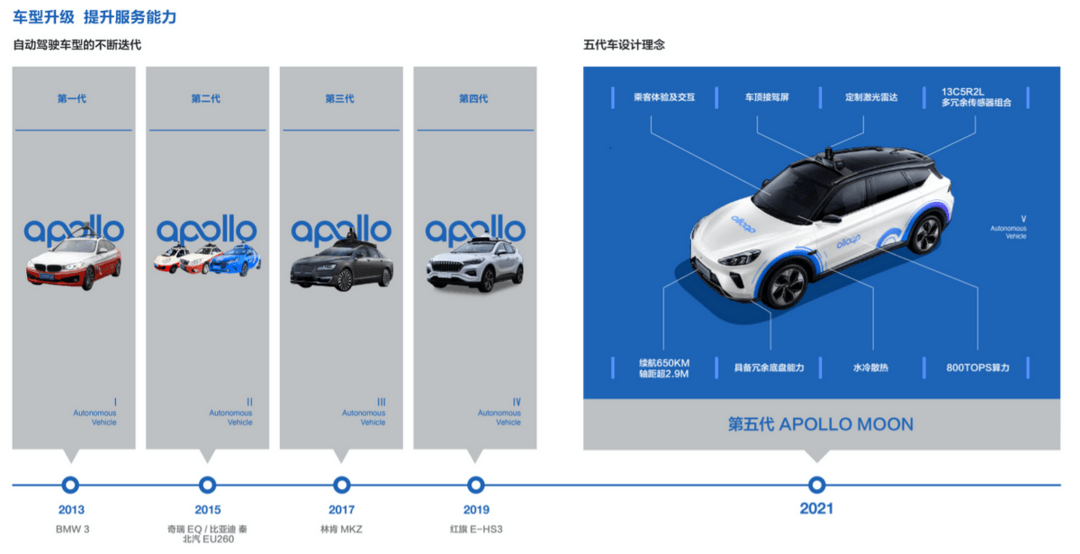
说起萝卜快跑,他其实是Apollo旗下的全新升级的自动驾驶出行服务平台。而Apollo是百度旗下智能驾驶技术平台。从2013年至今,Apollo从BMW3到现在的Apollo MOON一共换了五代车型。新一代的车型搭载车顶接驾屏、定制的激光雷达、乘客体验交互系统等,并且具有800TOPS的算力,性能较上一代要提升十倍。
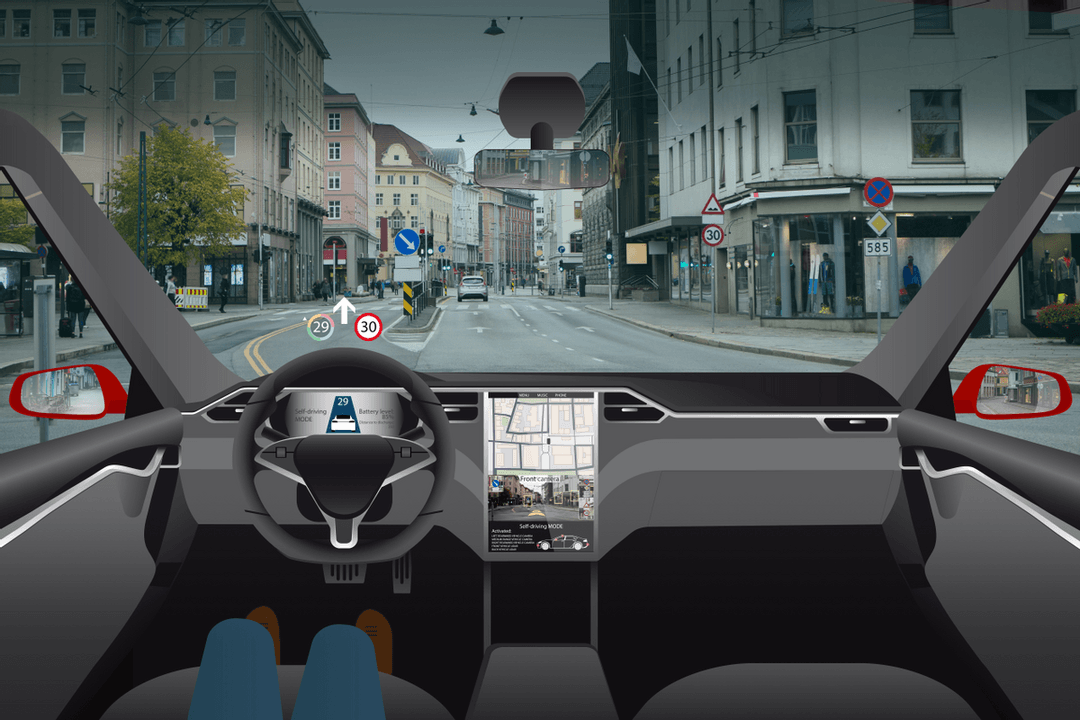
不过,萝卜快跑的无人驾驶与我们脑海中的不一样,萝卜快跑得无人驾驶车辆里面是有一个安全员的。但是安全员并不负责操控车辆,他只是在车上保证乘车的安全,其余的基本操作都是车辆自身完成,包括转弯、红灯停绿灯行、识别障碍物等。但是特殊情况还是得由安全员操作,比如:交通堵塞、道路封闭、别的行人或车辆不遵守交通规则等等。
就比如:遇到交通堵塞问题,Apollo的的自动驾驶系统中有一项远程安全员平行驾驶控制技术。该技术可以通过车端实时回传车辆的状态和360度环视影像信息。一旦遇到车辆本身无法处理的状况,安全员就可以控制车辆,保证车辆的安全畅通。
如果遇到道路封闭、管控及其他无法处理的路况,自动驾驶系统会进行有效识别,重新规划路线。如果无法规避,系统则由安全员或云端接管。
而且在人工无法及时控制车辆的情况下,汽车会根据紧急程度,进行减速、靠边停车等操作,然后再通过双闪、鸣笛、自动联系呼叫中心等措施来保障车上人员和周围车辆的安全。
关于这些大家都很关注的问题,百度在设计自动驾驶系统之初,就从整车、自动驾驶系统、系统的软硬件等各个层级提出一整套安全需求。并在不同场景下对硬件、软件、系统集成、整车等方面进行不同层面的测试,以此验证自动驾驶系统是否满足了安全需求。
而且,百度还在自动驾驶系统中将常见危险场景输入系统。如果遇到没有收录到的场景,自动驾驶系统将通过激光雷达、毫米波雷达和摄像头等感知车辆周边的环境数据,并通过卷积神经网络模型CNN实时获取交通参与者精准的位置、类别和速度朝向等信息,从而为决策规划控制模块提供判断依据以规避风险。
自动驾驶车辆在设计之初不仅输入了道路交通规则,也加入了文明驾驶、礼让行人的规则。能够360度识别各类交通工具,而且在上车路协同系统的助力之下,完全不受人类视野盲区和恶劣天气能见度低的影响,做到预先感知,多种措施一同保障路上行人的安全。
结语:自动驾驶作为全球最火热的赛道之一,安全性问题一直都是外界讨论的焦点。虽然现在已经有企业已经在北京开展了商业化试点服务,但是相关的法律法规和措施依旧有待完善,这也是自动驾驶未来发展的必经之路。
来源:第一电动网
作者:新能源观察
本文地址:https://www.d1ev.com/kol/162564
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!









 京公网安备
11010502033163号
京公网安备
11010502033163号