大家好,我是大包子狸呀。
今天我们一起来研究一下开车……哦,不,停车的姿势。

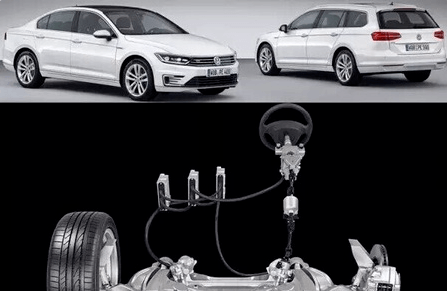
 但是,把车停下来并没有结束,还有关键的一步是怎么把车停到该去的位置上。于是,倒车镜、后视镜、甚至是电子后视镜也陆续登场,不过这些更多的还是起到辅助工具的作用,聪明(懒惰)如人类一直在探索怎么样能让车自己开进自己的位置。
但是,把车停下来并没有结束,还有关键的一步是怎么把车停到该去的位置上。于是,倒车镜、后视镜、甚至是电子后视镜也陆续登场,不过这些更多的还是起到辅助工具的作用,聪明(懒惰)如人类一直在探索怎么样能让车自己开进自己的位置。

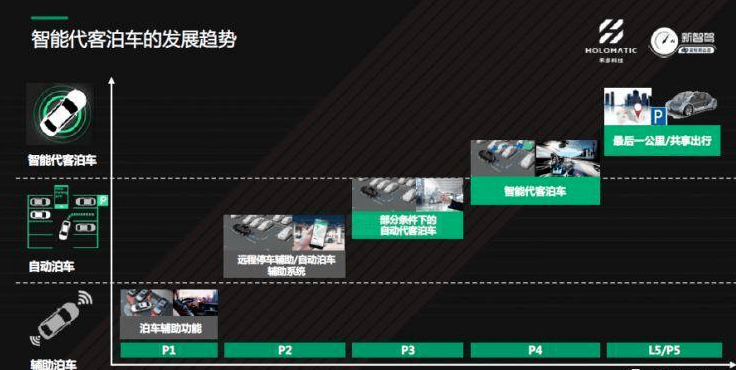
一开始,大家更多的还是在被动式自动泊车阶段。在这个阶段里,在泊车时提醒驾驶员前方或车辆后方障碍。发展到后来逐渐加入视觉图像、加入辅助线还有周边盲区预警,直到现在的倒车雷达+360度环视的场景。
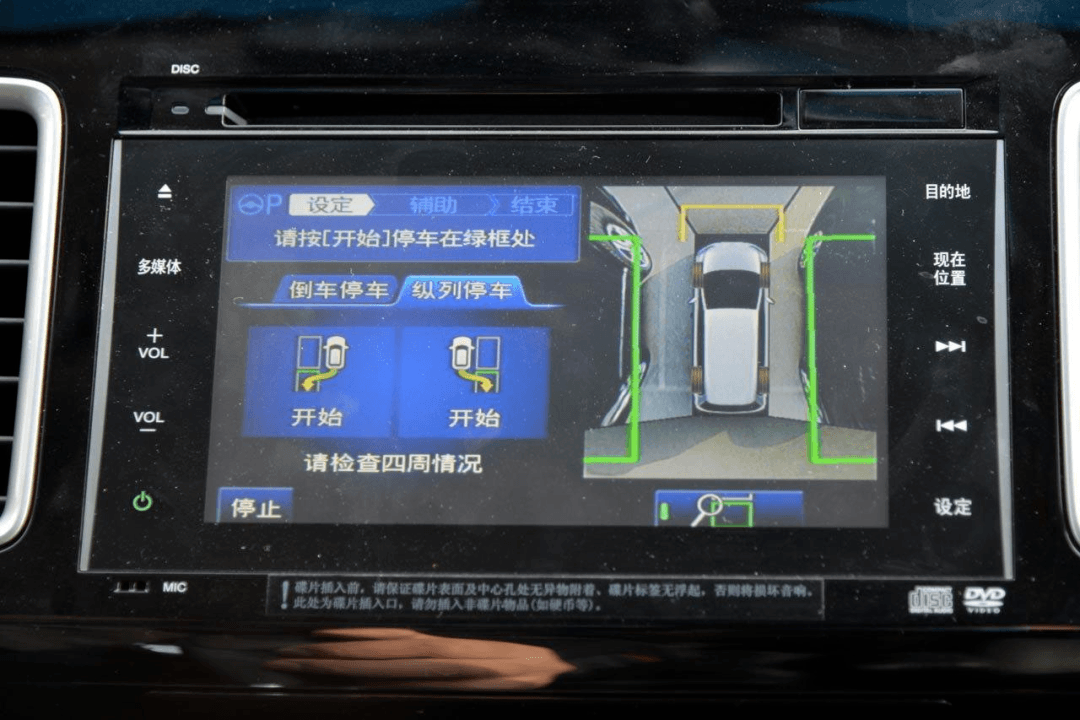
后来则出现了半自动泊车,就是在泊车的过程中,车辆提示驾驶员进行切换档位,并进行加减速。这个时候往往也是自动泊车被笑话最多的地方,选择自动又费心又费力还变得更慢。
然后就是现在的全自动泊车,在这个功能开始出现的时候,因为成功率不高,各种笑话满天飞。
但是到了现在,随着视觉融合技术的发展,已经可以全程不需要人操作,甚至人不在车内完成近距离的停车。
从上面的过程可以看出,泊车过程已经从“车不动,我来动”转变成了“我少动,车多动”,除了个别情况和按几个按钮之外,几乎没有更多的操作了。
首当其冲的就是,人类的智慧(懒惰)的需求。
根据之前百度Apollo分享的数据,我国一方面泊车市场存在5000W+的车位缺口,另一方面停车位的使用率只有45%。
在一线城市,有车族平均耗费15分钟进行一次停车行为,如果按照一天两次操作,那么每天就可以节省30分钟,一年将节省至少150个小时,相当于18个工作日。

再联想到实际生活中大家的体验,比如商场的地下车库找不到车位,出了商场找不到车,前面新手挡在行驶路线上;同时在一些特殊场景里,例如下雨天,没带伞或者拿着很多东西,需要照顾小孩等,在这些场景里,AVP系统能提供很多便利。
还有则是技术发展的考虑,可以说,AVP是通往自动驾驶的必经之路。
通过AVP泊车这一超低速环境下的自动驾驶,可以验证自动驾驶所有的架构设计,包含路径规划,建图,预测,感知等方面,为后续开放区域的自动驾驶积累数据和经验。
还考虑到目前公共区域的自动驾驶还受到技术、法理和伦理等多个方面的限制,在这些限制解除前,唯有AVP是可以落地的场景,所以各种新车自然会争相而至。

其次是云端,主要是通过车辆传感器的数据和信息与停车场信息同时上传到云端,通过云端计算后输出指令控制车辆。
比如威马与百度合作,借助百度Apollo平台的云算力,实现了远程自动泊车,可储存5条固定路线,出入库双向操作,不能脱离目视范围。
在体验过程中,发现车辆行驶距离大约在50米左右,距离过近,使得意义受限,另外该功能对网络有一定依赖,没有网络的地区,无法完成上传数据的操作。
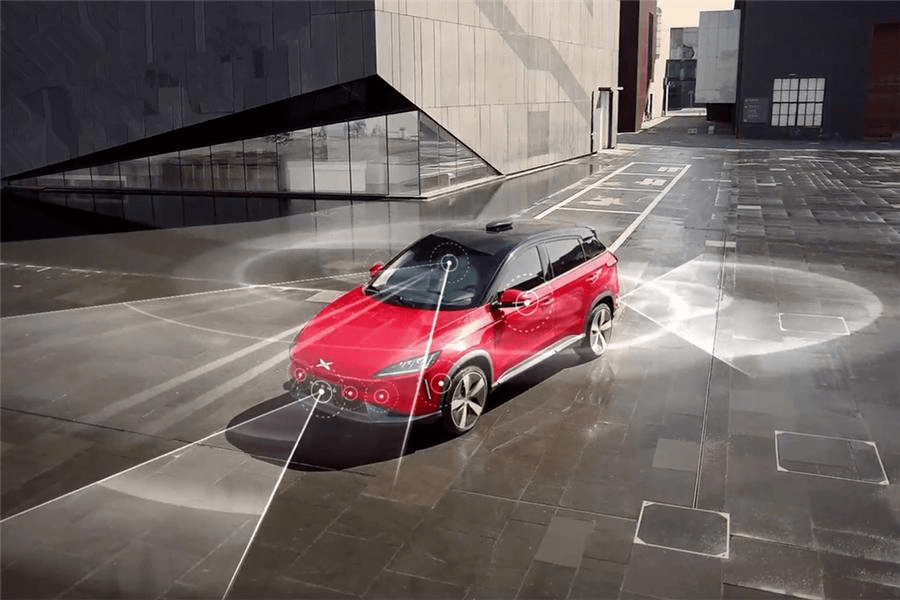
最后则是车端,主要是全部依靠车辆本身的感知来完成泊车,不需要外界信息辅助。
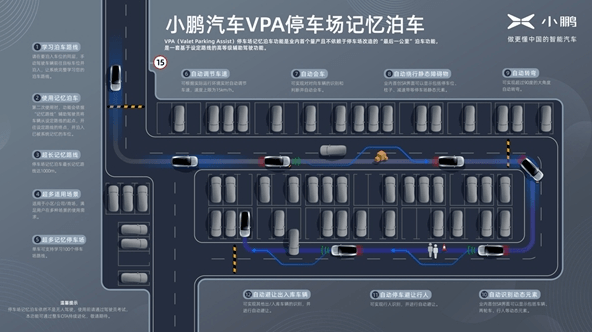
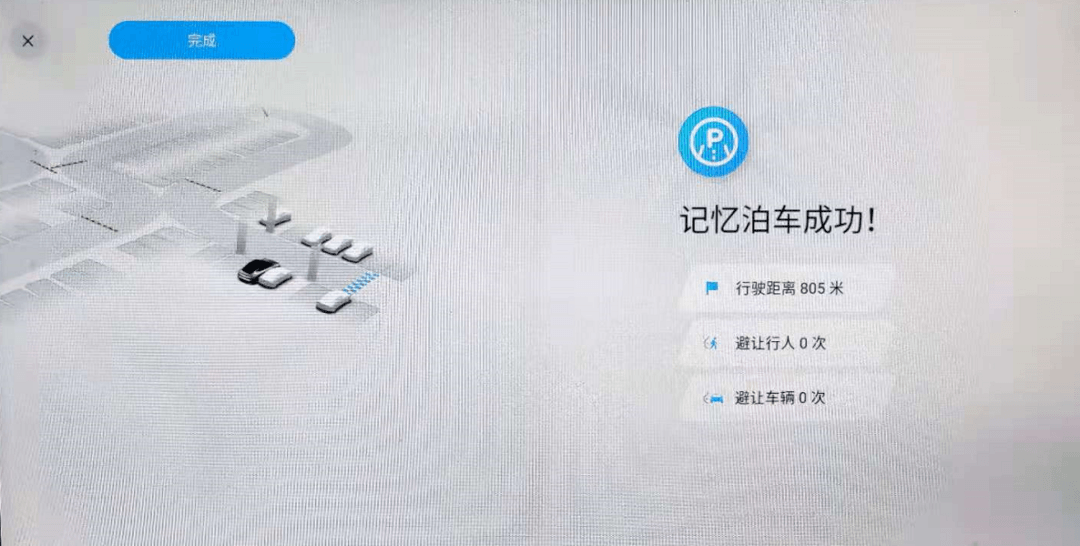
比如小鹏的记忆泊车,记忆泊车的思路是车辆会学习你在停车场的停车路线和车位,然后下次到了这个停车场就可以按照记忆去停。这个场景内不依赖网络和GPS,依靠车辆本身就可以完成泊车。
目前看来,该技术体验还不错,但是目前不能下车,也无法泊出,使得实际功能性不强,后期进一步发展对算法要求也较高。
04
这种姿势以后会解锁哪些新体验?
停车更加方便。
在小鹏记忆泊车目前的体验来看,更大程度上是一种技术体验和数据积累,可以在一定程度上缓解驾驶员在场内的简单重复劳动,可以利用这段时间去理理东西,做些回家或上班的准备什么的,当然和朋友同事炫技,给刚认识的小姑娘表演下,也是不错的利器,没想到现在撩妹都智能化,自动化了……(我结婚前怎么没有这个技术?!)
智驾加速闭环。
目前来看,在高速等封闭路段,诸如小鹏NGP等领航辅助驾驶功能已经实现点对点的自动辅助驾驶,随着P5等车型的发布,城市NGP功能释放后有望实现在城市主干道的点对点的自动辅助驾驶,当中高速、中低速场景都有了解决方案的时候,低速和超低速场景的解决方案正式目前记忆泊车所准备的。
一旦闭环形成,智驾系统或将可以实现你上下班经常走的路线,直接从家车库到单位车库的点到点自动驾驶,实现部分路线的全程自动辅助驾驶体验。
增加场景想象。
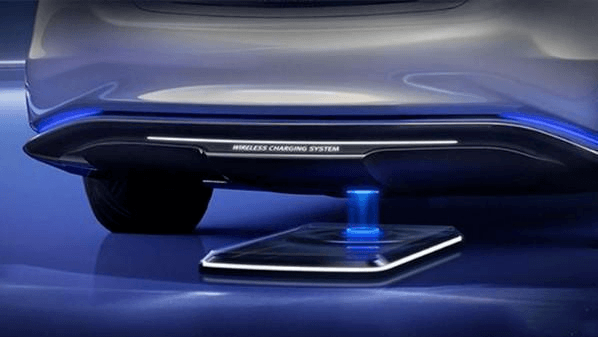
记忆泊车是个基础能力,在这个能力上,可以开展非常丰富的想象,比如自动驶入充电站(包括充满后自动离开),自动洗车后归位,自动代取快递,无法停车地区的下车后,自动围绕制定地点环绕,甚至点到点的自动车辆租赁/出行服务。
还可以按照国情,给车辆更多本土化的训练,比如E-NCAP里AEB测试场景包含躲避麋鹿等大型动物,换到国内是否需要检测车库里乱跑的野猫?又或是堆放的杂物?这些都给记忆泊车系统增加了无限的想象空间。
更或者众包地图,让每个使用AVP的车辆既是众包地图的使用者,又是贡献者。
让停车场中增加或消失的元素可以通过众包车辆进行更新,从而提供更好的驾驶体验。
Q:记忆泊车现在可以下车么?
A:记忆泊车目前不能下车,不过最后50米可以下车遥控泊车。
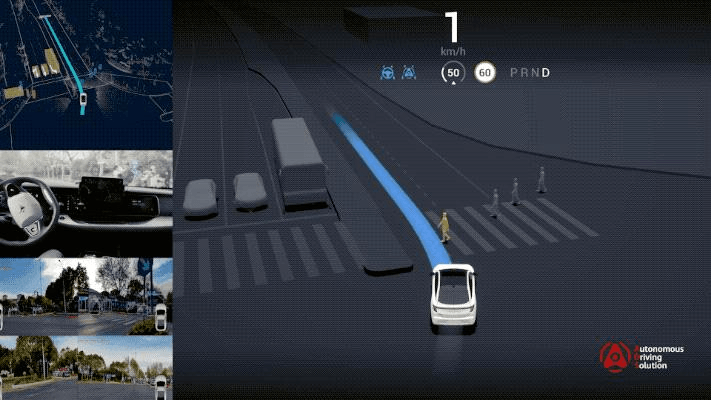
Q:记忆泊车遇到行人,车辆会避让么?
A:会。车库中突然遇到的行人,停放在道路上的汽车,隐藏在暗处的儿童都可以感知到,并及时做出反馈(但驾驶员还是需要保持对情况的监控,并及时做出必要的干预)。
Q:记忆泊车在一个车库里可以走多远,最多可以停几个车位?
A:记忆泊车在一个车路里可以走1000米,一个车库里只能记忆一个车位,但是可以识别100个车库的线路。

Q:记忆的车位被别人占了怎么办?
A:车辆现在不会停在其他的位置上,会退出记忆泊车,要求驾驶员接管。
Q:为什么有时候进入车库,系统提示记忆泊车不可用?
A:大概率是定位问题,就是车辆还没有定位到你已经来到了这个学习过的车库。该问题是已知短板场景,后续会不断优化。

Q:我可以让记忆泊车在车库里绕圈圈么?
A:记忆泊车的线路不能交叉或重叠,这会导致学习失败。

Q:为什么我的增强型遥控泊车无法开启?
A:最常见的是钥匙电量不足了,钥匙电量不足并不影响开闭车门和启动车辆,但是无法启动遥控泊车。
老师和我们反馈,小朋友不懂得拒绝别人,要加强培养。
大家觉得这个故事有问题么?
小朋友真的是不懂得拒绝别人么?
其实不是,因为小朋友已经两次拒绝老师的建议,而且是当着老师的面拒绝了老师两次,可是人往往只愿意看到自己想看到的部分。
辅助驾驶也是。当你预设立场,觉得这个功能不行,你就会把注意力都看到这个功能出现的各种问题,你会看到他无法正常进入匝道,会看到他极端天气下退出,会看到他在不清晰车道线内画龙……
但是却偏偏没有看到,他在大多数情况下工作正常,帮你减轻了80%以上的刹车、启动、控制方向、泊车等简单重复操作。
所以,正如哪吒里说的那样:人心中的成见是一座大山,任你怎么努力也无法搬动。那么,又何必在意别人的眼光呢,当我们足够光芒四射,或许,别人便无话可说了。
好啦,停车的姿势就研究到这儿,新技术的诞生都伴随着风险与机遇,相信主动拥抱变化,积极探索无限,我们都会收获更多的快乐体验。
来源:第一电动网
作者:电动汽车用户联盟
本文地址:https://www.d1ev.com/kol/148540
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!







 京公网安备
11010502033163号
京公网安备
11010502033163号