您要问2024年车圈什么最火,小鹏P7+绝对算一个,新车在巴黎车展开启预售,预售价为20.98万元起,将于11月上旬上市并交付。但这是本文关心的么?当然…不是啦!作为一个以智能化作为主要卖点的品牌,端到端和纯视觉智驾是我们关注的重点,小鹏P7+就同时配备了这两项技术。那么这套鹰眼视觉方案究竟有什么过人之处,能让小鹏如此自信地抛弃激光雷达,只用摄像头呢?最近各家车企频繁提到的端到端又是什么呢?下面就让我们一起来看一看,小鹏今年又憋出了什么大招。

● LOFIC:解决纯视觉智驾逆光场景看不清的小妙招
既然要了解小鹏的纯视觉智驾方案,首先让我们来看看目前在纯视觉方案中存在的一个很关键的难题,就是如何应对逆光场景,这需要尽可能地提高摄像头的动态范围。动态范围越大,那么智驾系统就能同时识别出车辆前方特别亮和特别暗的障碍物。设想一下,在一条漆黑狭窄的乡村小道上,一辆开着大灯的小轿车和一辆没开灯的摩托车并排走着,如果车辆的摄像头只捕捉到了比较亮的小轿车,没看到旁边的摩托车,那么就容易导致事故的发生。

高动态范围

低动态范围,看不清红框里楼房和马路的细节
看到这里,可能有些网友会说了,智能手机上的HDR(高动态范围模式)就能解决这个问题啊,为什么不用在车上呢?其实从思路上讲没有问题,在现如今的智能手机上已经有了一套较为成熟的软件解决方案,就是通过多帧合成的方式来同时兼顾暗部和亮部的清晰度。当你选择手机上的HDR功能时,手机会先后拍摄一张短曝光的较暗照片和一张长曝光的较亮照片,再各自取两张照片中亮度适中的部分,合成一张照片,这样就能获得良好的逆光拍照效果。

长曝光造成拖影
不过这种模式如果应用在汽车上,所面临问题是:不够快。或许大家在使用手机HDR功能的时候都会看到屏幕上“请持稳手机”的提示,这是因为基于多帧合成的HDR模式需要较长的拍照时间,通常需要1秒甚至数秒,这个时间看起来不长,但是放在汽车上还是太慢了。例如汽车在高速路行驶时的车速为120km/h,每秒车辆行驶33米,如果智驾系统每张照片要拍一秒,那么路上所有的景物都会变得拖影和模糊,无法获得清晰的图片。即使真能拍清晰,一秒后的照片也无法满足智驾系统对于视觉实时性的要求,在这个分秒必争的应用场景中,提早半秒钟识别出障碍物或许就是生与死的区别。

P7+的摄像头
在解决一个工程问题的时候,通常可以从硬件和软件两个方面去考虑。既然软件解决方案无法应用在汽车智驾上,那么就需要在硬件方面动脑筋。小鹏这套AI鹰眼视觉方案采用了单像素LOFIC(横向溢出集合电容)架构。对于视觉传感器来说,每个像素都会有一个电容来接受光电信号,如果光线太强,电容装满了,反映到照片上就是一大片纯白,看不清具体的细节。而如果光线太弱,图像信息淹没在传感器本底噪声中,那么图片上只能看到一堆彩色的噪点,也看不清具体细节。如果想提升动态范围,可以从两个角度来考虑:1.降低本底噪声。2.提升电容(满阱)容量。LOFIC就是通过提升电容容量的方法来提升动态范围。
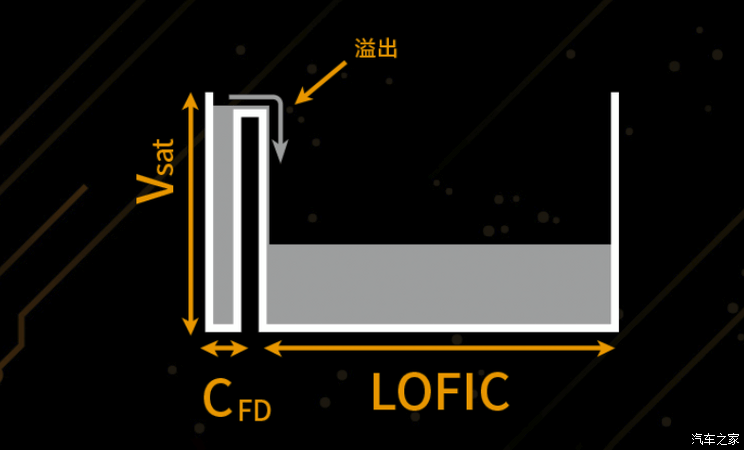
具体来看,LOFIC就是在传统的像素电容的基础上增加了一个溢出电容,用于承接由高亮度光源产生的溢出电荷,从而提升了动态范围,在强逆光环境下也能够捕捉到清晰的图像,这就是LOFIC最基本的原理,如果您看懂了上文的内容,那么其实也不难理解。当然,在实际工程应用中面临的问题要复杂的多,还要考虑多余的电容带来的制造难度、功耗增加和串扰等问题,要真正实现量产上车,对于芯片的设计和制造都提出了较高的要求,因此小鹏能够做到把这项技术量产上车,还是展现出了一定的技术实力。

从小鹏官方公布的案例来看,LOFIC技术的加持能够在大光差、逆光和暗光场景提供更清晰的视觉图像,例如在即将驶出隧道时,由于隧道内和隧道外的亮度差距较大,因此传统的摄像头拍出来隧道外面是一片纯白,而有了LOFIC技术的加持,就能够看到隧道外的更多细节,从而提升了智驾系统的安全性。

除了解决逆光环境的问题,这套AI鹰眼视觉方案还在感知和识别速度方面迎来提升,据官方宣传,这套鹰眼视觉方案的感知距离提升了125%,识别速度提升40%。此外,得益于端到端大模型量产上车及能力迭代,AI鹰眼视觉方案对视觉信息的利用效率比上一代提升8倍,整体计算效率提升了20%,响应速度提升了100毫秒,可实现与激光雷达方案同等的智驾体验。那么下面就让我们继续了解一下,什么是端到端技术。
● 车企天天在讲的端到端,到底是哪端到哪端?
或许大家在今年的各家车企发布会上都听到了端到端这个新鲜的概念,那么究竟什么是端到端呢?首先我们要知道,传统的自动驾驶/驾驶辅助系统是由多个模块组合而成的,例如感知模块、定位模块、路径规划模块、决策模块、执行模块等。每个模块负责不同的功能,它们之间会相互传递数据,但模块之间传输信息是有延迟的,并且有可能在信息传输的过程中导致数据缺失,因此需要一种集成度更高的智驾方案。

而端到端技术能够实现只用一个AI大模型完成从输入端(感知)到输出端(驾驶)的过程,不需要人为干预或中间步骤,而是通过大量的数据训练,使得AI大模型能像人一样“学会”驾驶,代替上面一大堆模块的功能。经过训练的端到端AI模型能够把摄像头、毫米波雷达、激光雷达等传感器收集到的感知信息,直接转换成转动方向盘、踩下加速和制动踏板等驾驶操作。这样做的优点是数据能够无损传输,并且让自动驾驶系统更加拟人化、智能化,提升面对复杂场景的适应性。

对于端到端技术,小鹏的自动驾驶负责人李力耘举了这样一个例子,在传统智驾中,工程师需要为车辆设计各种限速值,比如路口左转限速,右转限速,狭窄路段限速、高速匝道限速等,非常复杂,但是在应用了端到端技术之后,就不需要设置这些限速值,只需要用人类驾驶获得的数据去训练大模型,那么智驾系统就能“学会”像人类司机一样在各种路况保持合适的速度。
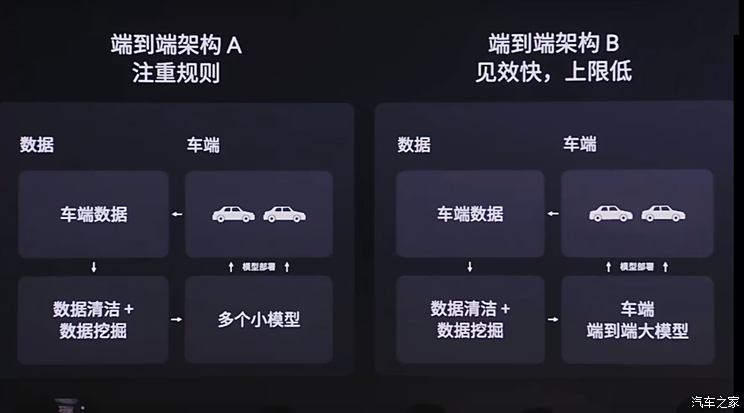
根据李力耘的介绍,目前行业中主要有三种端到端发展路线,第一种是通过大量规则小模型堆叠的 “大模型”,第二种是“车端大模型”,即直接将端到端模型部署于车辆上,虽然见效快,但受限于车端算力,且随着后期训练数据量的增加,容易陷入瓶颈。最后一种便是云端大模型,其参数量是车端模型的几十倍甚至数百倍,高算力的优势会使得智驾系统的上限大幅提升。小鹏官方表示,使用云端端到端大模型之后,智驾系统变道成功率提升了53%,绕行成功率提升了155%。

据悉,小鹏云端大模型的参数量将达到车端参数量80倍,通过大参数量的训练,能够尽可能地穷尽智能驾驶中的长尾问题,以覆盖更多驾驶场景,使XNGP实现L3级的智驾体验。小鹏表示,到2025年将会拥有10 EFlops云端算力,经过云端强化训练后,车端大模型上限将大幅提高,拥有时间+空间理解能力。值得一提的是,理想在今年8月30日北京车展公布的云端算力是5.39 EFlops,年底计划达到8 EFlops;9月24日智界的发布会公布的云端算力是7.5 EFlops;而10月底,特斯拉两个超算中心的总算力高达88.5 EFlops,将用于训练包括FSD、Robotaxi、Optimus在内的多个项目。
● 还有哪些车企应用了纯视觉技术

特斯拉Model 3
提到纯视觉,那么就不得不提特斯拉。特斯拉应该算是纯视觉智驾方案的开创者,何小鹏此前也曾亲自到美国体验特斯拉的FSD,不过小鹏在“摸着石头过河”的基础上也确实有一些创新,例如LOFIC技术就是特斯拉不具备的。特斯拉的优势在于它的全球道路和驾驶数据量是全世界最大的,智驾大模型是需要大量数据训练出来的,数据越多,智驾也就越智能,这也是中国品牌未来需要继续努力的一个方面。

极越07
除了特斯拉之外,极越也是国内为数不多采用纯视觉方案的车企之一。此前极越曾表示将与英伟达合作,高性能计算平台Thor将于2026年量产上车,因此可以推测出极越未来将要采用的是上文提到的车端大模型。虽然小鹏表示车端算力受限,但是车载智驾硬件发展的速度也非常快,因此这依旧是一种潜力很高的智驾方案。
全文总结:
在这个新能源和智能化大行其道的时代,各家车企的智驾和其他智能配置的迭代速度非常快,新车发布会上的各种新技术和新名词也是层出不穷,相信屏幕前的不少消费者在面对这些新概念时都会感到“不明觉厉”、“跟不上时代了”、甚至觉得“故弄玄虚”,产生了怀疑的态度。针对大家的这些疑问,本文解析了小鹏P7+搭载的全新纯视觉智驾方案和端到端大模型,希望对您的选车购车有所帮助。另外,此前在10月24日,小鹏正式发布了天玑XOS 5.4.0,除了智驾方面,在AI座舱、AI底盘和AI互联方面也都有所升级,感兴趣的朋友可以点击蓝色链接了解更多信息。(文/汽车之家 颜欢)
来源:第一电动网
作者:汽车之家
本文地址:https://www.d1ev.com/carnews/xinche/251580
以上内容转载自汽车之家,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号