从1961年斯坦福车的问世,自动驾驶汽车概念便开始进入公众的视野,相关成果也从最开始的移动一米需要10到15分钟到如今在特定园区内行云流水地搬运货物。
不管技术怎么更迭,但不变的是,最终的需求都是试图用各种技术来解放人的眼睛、耳朵、大脑和手脚。
耳朵和眼睛用来感知外界的变化,从而为大脑进行决策提供有效信息,大脑做好决策之后发出指令来指挥手脚进行操作。
自动驾驶技术要实现对人的完全解放,做好感知层的布局首当其冲,而铺好一张感知层的大网,得靠各种传感器来搜集外界信息,然后通过数据的整理、分类和清洗形成一张动态的高精度地图来指导车辆行驶。
本文主要是从采集方式来剖析高精度地图的市场现状。
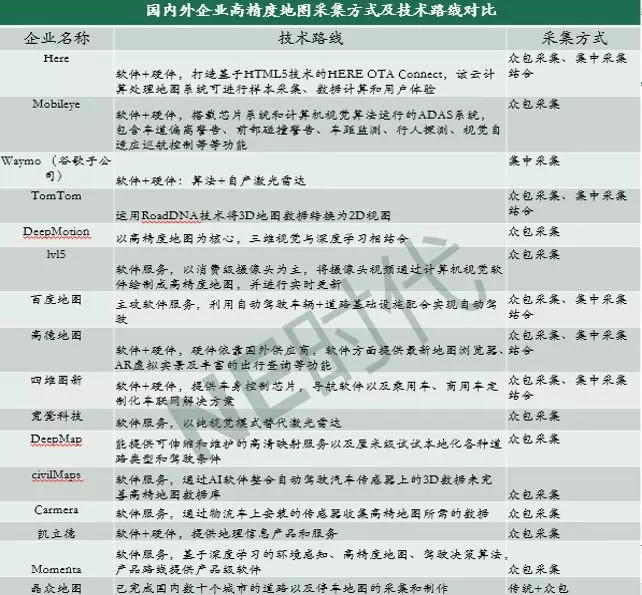
从采集端来看,目前主要有两种主流采集模式,一种就是以传统图商为代表的“专业测绘制图”模式和以具有相关硬件的“数据众包自动生产”模式。
目前,获准中国甲级测绘资质的企业共20家,背后涉及的企业及大佬有小米、华为、腾讯、蔚来、戴姆勒、马云和部分A股上市公司,其余部分为国家测量单位。
测绘方面,百度较为典型,除了参与早期测绘资质的标准制定。2017年国家测绘地理信息局公布的数据显示,截止2016年底百度共拥有在册测绘人员224名,其中包括了百度自身的56人和其于2013年收购的、拥有“电子导航地图制作”甲级测绘资质的长地万方的168人。此外,百度地图事业部员工超过2000人。
虽然传统地图商已经在测绘采集方面进行了布局,但是其高资金成本和人力成本、时间成本让众多企业望而却步。
大多数企业采取了“数据众包自动生产”模式,这也是目前主流采集模式,国内外十几家高精地图制作商均采用了此模式。

其中,Mobileye旗下的REM地图服务和博世旗下的BRS地图服务都是采用众包模式,日产、大众、宝马等多家车企也与高精度地图制造商联合进行数据采集。
之所以高精度地图需要采取众包模式,一方面是因为其数据来源广泛,包括轨迹数据、图像数据、雷达数据、CAN数据等,另一方面是冗杂的数据来源需要进行整理和清洗,再加上高精度地图需要频繁更新。在此情况下,众包模式能实现较大程度的资源分担和共享。
从轨迹数据上来看,由于传统的GPS只能定位某个点的距离和既定路线的规划,对于物体移动方向和运动轨迹无法进行初步预测,所以高精度地图使用GNSS定位和辅之IMU(惯性测量单元)的惯性位置感知测量功能结合,感知物体目前位置和运动轨迹。
IMU的优势在于可以根据物体现有运动状态来预测物体将要运行的方位和幅度,弥补了GNSS关于点定位的缺陷,此外,IMU在恶劣天气条件和没有GPS信号下依旧能工作。目前在医疗和康复领域、无人飞行装置及测量和控制工业机械振动方面应用比较普遍。
但是IMU存在的问题是,降低漂移率和保持长期稳定性也是一项挑战。
2016年10月,IMU老牌制造商ADI(亚德诺半导体)推出ADIS16490,能在导航应用中维持很低的位置漂移,实现低噪声、严格对准、抗振性和高带宽(陀螺仪为480 Hz,加速度计为750 Hz)的精心平衡组合,为实施最具挑战性的系统提供最低总误差。
资料显示,ADIS16490其起始单价(千片定量)为1645美元。

图片来源:ADI官网
关于图像数据和雷达数据,对应的技术路线是自动驾驶的两大流派。
一派主张以激光雷达为主,辅之以毫米波雷达、超声波雷达等传感器,利用其得到的点云图生成矢量图,然后结合各种数据形成关于物体的三维图,由于激光光束更加聚拢,所以在探测精度上具有一定优势。但是最大的问题是成本过高、并且体积大、配套产业链还未完全成熟。
2016年8月,百度和福特公司对硅谷激光雷达生产商VelodyneLidar共同投资1.5亿美元,目前该公司比较成熟的业务是用作商用卡车的部分。
福特随后也公布其自动驾驶战略规划图,计划2021年推出用于共享出行的全无人驾驶量产车,新的自动驾驶测试车将以福特Fusion混合动力车型为基础,基于福特第三代自动驾驶平台开发。
此外,国内导航地图生产商头部企业四维图新此前还联合ibeo、亮道智能,围绕自动驾驶的“激光雷达+高精度地图”方案进行研发和技术验证。
认为激光雷达作为自动驾驶和高精度地图采集必不可少的配置的这一派系,推崇此种技术路线的主要原因就是基于激光雷达能根据点云图形成矢量图,从而生成三维图使高精度地图更加立体化。
但是激光雷达受天气影响较大,目前相关产业链还未完善,所以导致其价格较高。
以谷歌子公司Waymo为例,其搭载了摄像头、毫米波雷达、激光雷达、音频探测系统等传感器。
资料显示,硅谷激光雷达生产商Velodyne推出的HDL-64型号的激光雷达售价高达7.5万美元。一般车用激光雷达的售价均在万元以上,重量1kg,测距小于200m,精度为20mm。
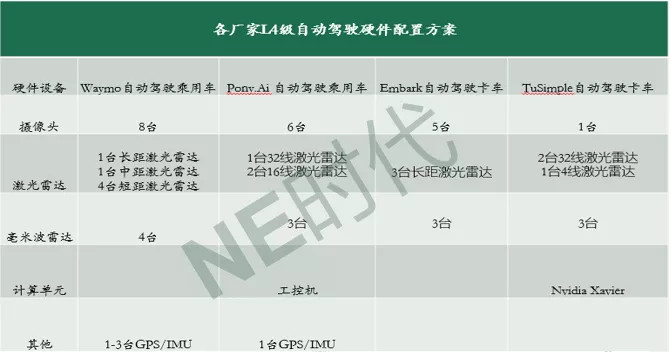
目前大体上实现L4自动驾驶的硬件设备一般包含:6-16台摄像头、3-12台毫米波雷达、5台以内激光雷达以及1-2台GNSS/IMU和1-2台计算平台,整体成本基本在50万左右甚至更高。
Velodyne亚太区总监翁炜曾在2018年表示,“预计在2020年下的时候,Velodyne大概会开始做百万等级的装置,到那个时候Velodyne激光雷达年总体出货量达到百万等级,所有的产品都可以控制在1000块美金以内。”
对于激光雷达的高成本和产业链相关配置的不确定,另一派系坚决反对高精度地图的制作依赖激光雷达,特斯拉首当其冲,特斯拉Autopilot系统就是主要以摄像头为主。
特斯拉人工智能和自动驾驶视觉总监 AndrejKarpathy曾表示,世界是为视觉识别而构建的,激光雷达很难分辨塑料袋和轮胎的区别。
从某种意义上来说,激光雷达一味地拔高技术壁垒,抛开了自动驾驶关于视觉识别的最直观需求。而且从运算方面来看,传感器越多越复杂,对算法的数据处理要求越高,成本自然会增加。
如果高精度地图采集主要依靠摄像头,单面摄像头可以先通过图像匹配进行目标识别,然后根据传感器的尺寸,通过目标在图像中的像素大小估算目标距离。双目摄像头可利用两幅图像的视差直接对前面物体进行距离测量,理论上双目摄像头的精度可达到毫米级。
但是,摄像头虽然在成本上具有优势,配置高的摄像头也能满足精度要求,但是对于高精度地图所需要的关于道路图层、定位图层、动态图层的数据,摄像头可能没办法完全采集成功。
摄像头虽然能捕捉比较基础的道路、路口模型、车道边线等等平面的数据信息,和路标、警示灯等立体物体的地理信息,但是无法真实地还原各物体点与点之前的关系,所以得使用雷达等设备进行辅助。
而且使用摄像头形成的平面图像或者视频转化成立体的物体,处理起来数据比较庞大和冗杂。
特斯拉autopilot系统配置的毫米波雷达和超声波传感器虽然能实现自动驾驶关于近距和中远距离的障碍物探测,但是对于高精度地图的生成还存在一定的不便利因素。
在采集方法上,不同的企业有其独特的方法,但是对于高精度地图的完整制作,是一个共同的目标,其进行的程度决定着自动驾驶的实现程度。
国内市场上
2019年3月29日,宽凳科技发布了中国第一张全自动高精地图,该高精度地图采集模块已经可以实现新旧车道线的识别、立交闸道出入口关键点的标示,还克服了雨雪、大雾等复杂天气和夜间光线条件差的传感器造成的影响,可实现高精度地图的24小时全天候采集。
宽凳科技CTO冯汉平表示,公司目前已经完成百余城的数据采集,以及近百万公里道路的地图绘制,同时完成了中国道路“主动脉”的铺设。
2018年8月27日晚,百度智能驾驶事业群总经理李震宇对此表示,百度已获得来自长城汽车的高精度地图和自定位量产订单。
四维图新此前表示,预计2019年将完成全国首张高精地图的制作,并称其主导制定的高精地图全国统一标准方案将很快通过。
国内市场上,BAT相关企业已发布收到订单的消息,部分企业表示已经完成高精度地图部分线路的制作。
国外市场上
Mobileye2019年年初表示,已完成日本高精度地图采集并且携手英国地形测量局推高精地图服务。
谷歌母公司Alphabet旗下的自动驾驶公司Waymo 2018年年初宣布,其自动驾驶汽车测试地点又新增了一座城市——亚特兰大。
国外市场上,高精度地图的绘制还在测试阶段,完整的高精度地图暂未形成。
来源:NE时代
本文地址:https://www.d1ev.com/news/shichang/95454
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号