嵌入式软件的作用对于自动驾驶车辆来说是至关重要的,因为它控制车辆如何感知环境,车载计算机收集实时数据,这些数据被系统用来做出决策依据,向底盘执行系统提供即时命令反馈,并最小化风险。
传统的ISO 26262标准规定仿真的作用在验证系统行为中是至关重要的,并建议在各级进行仿真。模拟的优点是测试是可重复的,并且它支持超过性能/耐久性极限和危险情况的测试能力。
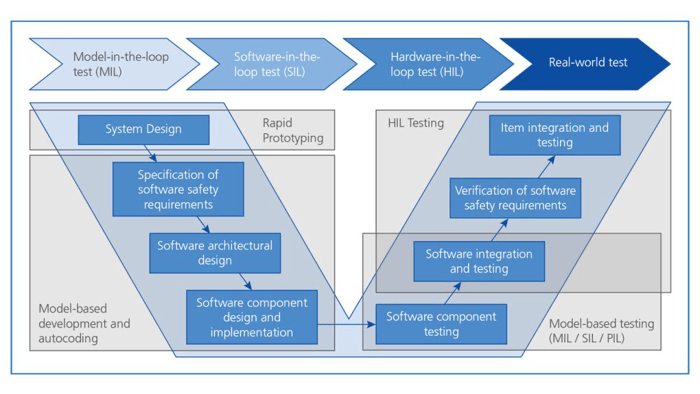
ISO 26262提出了用于进行软件安全需求验证的环内模型(MIL)、环内软件(SIL)和环内硬件(HIL)仿真。但由于缺乏仿真和测试资源,标准仿真技术可能不足以满足所需的测试量。
对于自动驾驶来说,仿真测试将是技术验证、支撑系统培训、测试和验证的基础技术,尤其是基于深度机器学习的系统来说,它是“必须的”,有利于在技术部署之前带来一些急需的验证和信心。
几乎所有的OEM公司都把连接和自动驾驶放在未来十年战略的前沿和中心,然而,要证明这些优势,需要OEM公司积累大量自动驾驶的测试里程。仿真可以允许OEM和其他自动驾驶技术开发人员在罕见和潜在危险的情况下测试他们的系统,而不会造成可能的真实事故。
理论角度,要积累数百亿英里以对自动驾驶系统有信心,将需要在10年内部署至少300万辆自动驾驶车辆进行里程测试。过去几年,Wymo通过他们的Crcrft模拟软件,在一天的模拟中覆盖了2009年到2018年间他们的车辆所覆盖的里程数。
根据Wymo最新发布的数据,在过去几年公司完成了25个城市,不同时间、不同气候、不同道路的1000万英里实际道路测试;而目前公司每天虚拟测试里程就可以达到1000万英里。按照计划,到10月底,Wymo的虚拟测试里程已经突破70亿英里。
目前,Wymo虚拟车队部署有25000辆车,在谷歌的数据中心每天运行24个小时。
现在,全球有不少仿真测试平台工具,如NVIDIA和AIMotive,都把仿真测试作为其自动驾驶解决方案的一部分,而像Cognt和Metmoto这样的专业工具供应商也正在帮助厂商简化将仿真集成到自动驾驶车辆开发工作流程中。
在近日NVIDIA提交的一份自愿性自动驾驶安全评估报告中,特别提及从收集数据到训练,再到仿真,来构建自动驾驶车载硬件来保证开发测试的尽可能安全。
由于Nvidi在仿真中提供了虚拟安全验证,它的安全报告描述了这些系统在车辆到公共道路上开始测试之前建立安全算法中所起的作用。
“模拟使我们能够确保系统的安全性,证明技术,并建立与公众的信任。”NVIDIA相关技术负责人表示,我们将能够捕捉到很多我们无法捕捉到的东西,或者这些东西需要永远在现实世界中才能看到。
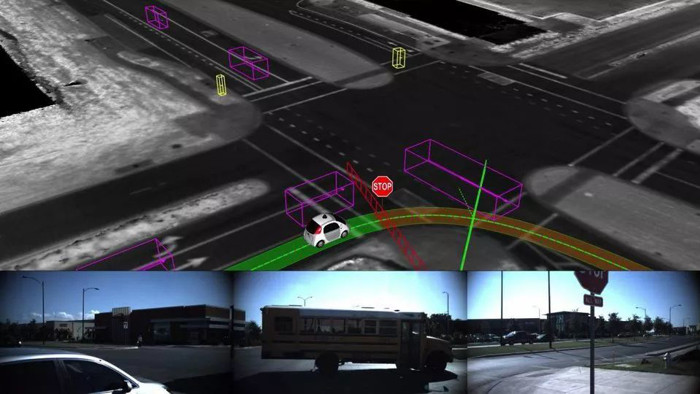
目前,仿真模拟被用来回放车辆在现实世界中收集的传感器数据,并验证自动驾驶软件能否合理地处理棘手的情况。例如,一辆测试车的摄像头可以记录夜间过街行人的视频。软件开发人员可以在每次更新软件时使用该视频,以验证该软件仍然正确地检测到行人。
而类似Wymo的更为先进的模拟器Crcrft,能够建立整个道路网络,其中自动驾驶测试车辆被许多其他车辆,自行车,和行人包围。工程师可以使用这些虚拟世界来测试和重新测试特定场景。
此外,越来越多的自动驾驶初创公司也在打造自己的虚拟仿真测试平台。
没有模拟器的自动驾驶开发人员今后可能甚至无法生存——这是必不可少的。在仿真平台上训练模型,然后用真实数据对它们进行微调,这大大减少了需要完整训练模型的真实数据量。
去年,微软开源了一个用于模拟测试安全性的高拟真的人工智能系统AirSim研究项目,能够利用AI技术,提供逼真的环境,模拟交通工具的动力和传感,帮助研究人员和开发者构建安全的自动驾驶系统。
此外,AirSim的更新版不仅包含车辆模拟、新的场景,还提供简化编程的 API 以及即插即用的代码,研究人员和开发者可以针对特定的需求创建所需要的场景,还可以利用 AirSim 的拓展性添加新的传感器、车辆,甚至使用不同的物理引擎。
AID是奥迪(Audi)的全资子公司,拥有自动驾驶测试车队,这些车辆运行着来自以色列人工智能和深度学习公司Cognt的自动驾驶车辆仿真平台。该平台负责人表示,目前社会对自动驾驶安全问题和效率的容忍度为零。为了实现这些目标,仿真是并行于扩展道路试验大规模开发和验证自动驾驶的关键技术。
通过与Cognt的这种多年的合作,AID选择了实施大规模的基于云的模拟解决方案,实现端到端的仿真测试,并将支持自动驾驶车辆的整个产品生命周期。
AID的CTO Alex Hg表示,从他们的角度来看,仿真是开发和测试自动驾驶系统技术的关键部分。按照业内此前的说法,需要80亿至110亿英里的道路试验来证明自动驾驶车辆的安全性达到可信任的水平。
随着模拟测试工具的不断成熟,这条开发路径越来越类似于在传统半导体行业使用的电子设计自动化(EDA)工具。EDA软件始于学术界,后来被半导体制造商采纳以加速芯片开发。
EDA技术就是以计算机为工具,设计者在EDA软件平台上,用硬件描述语言VerilogHDL完成设计文件,然后由计算机自动地完成逻辑编译、化简、分割、综合、优化、布局、布线和仿真,直至对于特定目标芯片的适配编译、逻辑映射和编程下载等工作。
从1981年开始,电子设计自动化逐渐开始商业化。最终,独立的公司,如Cdence和Mutor图形出现,为芯片制造商提供EDA软件。
类似地,可以设想,未来自动驾驶车辆仿真软件也有可能从自动驾驶公司构建的内部解决方案转变为独立公司创建的产品。
这或许会成为未来自动驾驶技术初创公司的一条出路。
来源:盖世汽车
本文地址:https://www.d1ev.com/news/shichang/79934
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号