盖世汽车讯 机器人夹持器已经成为许多行业必不可少的一部分,包括制造、包装和物流等,主要用于拾取和放置任务。最近,对机器人夹持器的需求也扩展到了农业领域,用于收获和包装任务。然而,传统机器人夹持器难以适应不同农作物的独特形状、性能和微妙特性。因此,人们对具有更多功能的机器人的需求不断增加,以适应各种形状、大小和质地的物体。
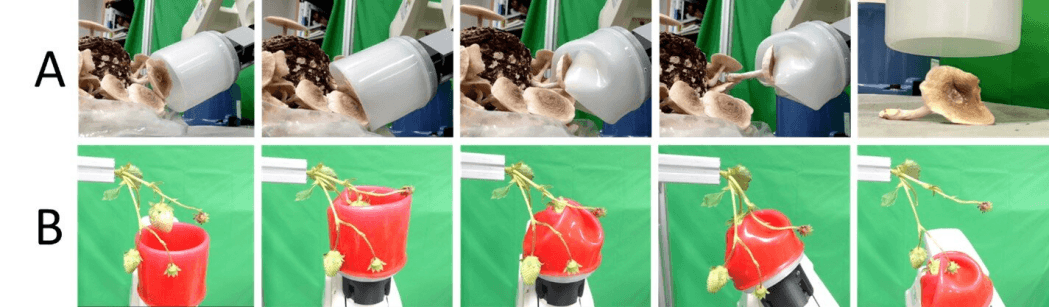
(图片来源:International Journal of Robotics Research)
用软材料制成的机器人夹持器成为解决上述问题的潜在方案。然而,当前方法通过数据基模型来生成复杂的控制和规划方式,以使这些夹持器适应复杂的几何形状。这些模型需要大量数据,因此普遍适用性有限。此外,将感觉系统集成至它们柔软的身体内需要复杂的设计和精确的制造方法。
据外媒报道,日本先进科学技术研究所(JAIST)的研究团队为此开发出创新软机器人夹持器,并将其命名为ROtation-based Squeezing grippEr(ROSE)。
来源:第一电动网
作者:盖世汽车
本文地址:https://www.d1ev.com/news/shichang/249112
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号