盖世汽车讯 据外媒报道,加州大学伯克利分校(University of California, Berkeley)机器人专家团队报告称,通过使用模拟到真实(sim-to-real)的强化学习来训练机器人,可以训练机器人完成相对简单的任务。相关研究论文已发表于期刊《Science Robotics》。该研究小组训练了一个机器人在陌生的环境中行走,同时承载着各种负载,结果机器人均没有翻倒。
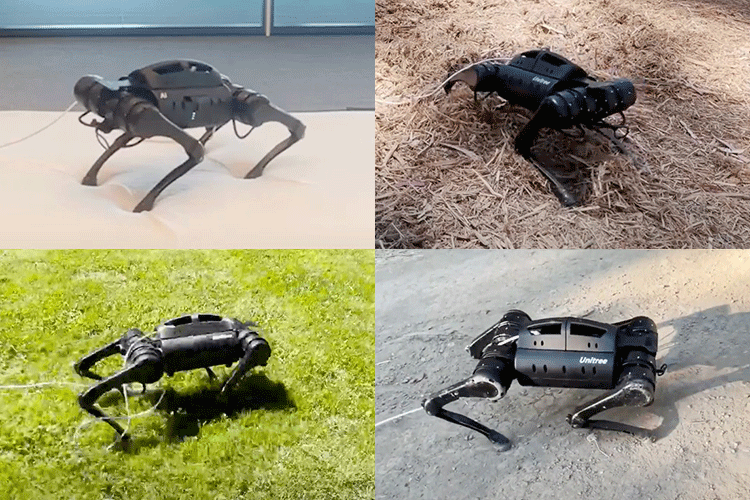
图片来源:加州大学伯克利分校
来源:第一电动网
作者:盖世汽车
本文地址:https://www.d1ev.com/news/shichang/227765
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号