前段时间,谷歌 Waymo 购买 2 万辆纯电动版 I-PACE+6.2 万辆 Pacifica,软银 22.5 亿美元投资通用旗下的自动驾驶公司 Cruise,无人驾驶领域两大「氪金」玩家突然开始加注筹码,「大象转身」让整个行业震动。
是否大局已定?剩余的选手都是骨灰亦或者陪衬?
很显然,这个回应是否定的。毕竟在国家意志之下,Waymo 和 Cruise 短时间之内想要在国内落地还是很难的,所以说这是国内无人驾驶公司机会发展的窗口期。
在国外无人驾驶公司如此动作之下,国内无人驾驶公司要如何应对,无人驾驶研发进度又是怎样,这些是大家所关注的。
7 月 5 日,GeekCar 作为首批受邀媒体前往景驰做深入的专访,在这里,我们除了进行试乘体验之外,还获得了一些很有价值的信息。

目前,景驰拥有 25 辆在跑 L4 无人驾驶改装车,行驶里程超过 3 万公里,在 3 座城市每天进行 400 公里的路测收集数据优化算法,已经完成超过 400 公里的高精地图测绘。

在 2018 年,景驰给出的运营规划是这样的:到 2018 年底,改装无人车达到 100-200 辆;运营范围要覆盖方圆 15-20 公里;全球员工达到 200 人,中国达到约 100 人;近期内完成 A 轮融资;预计在 2020 年实现无人驾驶商业化运营。
提到融资,景驰运营副总裁张力自信的说道:「 我们 A 轮融资将成为国内融资最多的公司,同时我们将成为初创公司中估值最高的公司 」。
张力告诉我,景驰并不急着进行融资,更多的还是按照自己的节奏在进行运作。最近景驰正在与各种投资人以及代表团会面,「我们直接向投资人展示我们的技术,由投资人直接确定起始点和终点,然后上路体验。」张力如是说。

有句话说的很好:实践是检验真理的唯一标准。
前几天景驰在大雨天进行无人车测试是一个很好的佐证。测试车是广汽传祺 GE3,在大暴雨天气行驶同时穿过 2 公里长的隧道。
在暴雨天气下,对于传感器是一种考验。暴雨会影响摄像头进行交通标识的识别导致传感器性能降低,同时会影响点云数据的收集;进入隧道,GPS 信号比较薄弱,会对无人车定位产生影响
从视频中可以看到,景驰无人车在这种情况下运作良好,而且在遇到特殊情况比如偶遇逆行车辆或行人自行车都可以进行很好的处理。
「能在隧道中正常行驶,与景驰采用 GPS+惯导、以及多种传感器前融合的策略不无关系,这更坚定了我们的技术路线。」景驰研发副总裁钟华如是说。
GeekCar 也亲自体验了景驰无人车,以下是体验视频:
视频中几个关键点:
00:08 经过红绿灯路口的时候,红绿灯显示红灯,无人车识别并停下,当红绿灯变为绿色之后,无人车并未启动;第二次显示绿灯时车辆才开始启动。工程师告诉我,可能摄像机有点问题,需要重新调试。
02:02 前方有车辆违规停车,景驰无人车先停下来,确认前后方都没有车辆之后,无人车自行绕过前车。
05:16 无人车进入隧道,通过仪表盘可以看到,车辆按着限速 50km/h 在跑,这个速度真的很快,而且是在隧道中。
06:50 无人车检测到行人逆行,减速停车。
09:25 在无人车转弯过程中,你可以发现镜头猛晃了一下,原因是后方来车与无人车车距过近,传感器检测距离过近紧急刹停。这里的试乘体验并不是很好,但是为了尽可能的保证行驶安全,这一点是不可避免的。
10:17 无人车进入隧道,有电动车违规进入隧道行驶,但是无人车行驶正常。
16:00 经过一辆洒水车,传感器检测到前方有障碍物,然后绕开洒水车继续前进。整个操作整体来说很流畅。换作是人类驾驶员,意识到前方有洒水车当下就会进行避让处理,这是需要优化和加强的地方。
值得一提的是,整个无人驾驶过程中,安全员的手始终保持图中姿态,保证行车安全。

总之,整个试乘下来的体验还是不错的,我可以理解为什么张力这么自信的说可以在 A 轮融到最多的资金。
在整个体验过程中,无人车在驾驶平顺性以及安全性方面表现还算出色。景驰研发副总裁钟华告诉 GeekCar,从一开始,景驰就把交通规范写进算法中,无人车可以进行识别来往车辆、自行车、行人,然后做出等待红路灯、礼让行人、自动变道等操作。
像刚才遇到的后方来车突然冒出来的这种场景就是无人驾驶中常说的长尾场景(long tail)。长尾场景主要指那些种类繁多、发生概率较低或者突发的场景,比如闯红灯的车辆,横穿马路的行人,红绿灯损坏的路口,路边违章停靠的车辆等。
所以,为了获得这种长尾场景,除了进行路测之外,景驰还通过模拟器(simulation)对无人车进行「特训」,每天进行 2.2 万公里的模拟测试。在单个场景中模拟上万辆汽车、自行车、行人或其他路上可能出现的障碍物与无人车进行交互,进而对无人驾驶技术进行优化,使无人车变得更加安全。
谷歌 Waymo 购买这么多车辆投入运营的部分原因也是为了获取无人驾驶中的长尾场景。目前路测的车辆已经解决了大部分场景难题,但是长尾场景出现概率低,少量车进行测试去获取这种场景耗费的成本以及时间也越来越大。所以,Waymo 需要扩充无人驾驶车队的数量去做更好的优化测试。
从另一方面讲,这种场景的获取和优化也是景驰以及国内其他无人驾驶公司需要解决的问题。
高精地图作为无人驾驶中重要的一环,不管是谷歌 Waymo 还是通用 Cruise 都在进行高精地图的绘制,在这一点上景驰也不例外。
目前,景驰在三座城市(硅谷、安庆、广州)完成了超过 400 公里高精地图绘制。谈及高精地图数据收集的难度时,钟华告诉我们,高精地图的收集并不难,以广州生物岛为例,景驰两辆车跑一天(甚至用不了一天)就可以采集到相关的数据。

景驰告诉 GeekCar,目前高精地图的绘制并没有一个统一的标准,每家公司的需求都是不一样的。以景驰为例,景驰公司的算法都是在不断迭代优化的,景驰的传感器配置已经迭代了三次,第一套方案是一个 64 线的 Velodyne 激光雷达+两个摄像头+2 个毫米波雷达;第二套方案为一个 32 线的 Velodyne 激光雷达+两个摄像头+2 个毫米波雷达,很快景驰就会推出第三套传感器方案:两个 32 线 Velodyne 激光雷达+4 个摄像头(暂时已知配置是这样)。
算法以及传感器方案的变化,也就意味着对高精地图的具体要求也会发生变化。于高精地图供应商而言,之前收集到的地图数据就作废了,需要重新再收集一次。不仅成本会增加,而且效率也不是很高。所以基于以上几个因素,景驰决定还是自己进行高精地图的收集。

虽然景驰目前在硅谷、广州、安庆都有开展测试,但是景驰科技告诉 GeekCar,景驰目前注意力还是更集中在国内。当问及原因时,景驰给出的答案是这样的:「国内路况以及交通密度最为复杂,对于无人驾驶的技术要求更加严格」。简言之,国内的数据更有价值。
在这一方面,做本土化的无人驾驶已经成为主流。但是在这基础上,景驰还在做另一件事:本地化。
为什么要做本地化的无人驾驶呢?因为无人驾驶的设计不仅仅只是硬件平台+软件架构这么简单。更多的还有对于场景条件的适配。比如当地交通警示标志的设置、交通法律法规、路况信息、天气状况以及当地人驾驶习惯。对应的,无人车的整个硬件适配以及软件算法都要做相应的调整与优化。
比如,在广州就要针对广州湿热、多雨的自然条件以及上述提到的其他因素进行适配。
为此,景驰专门对广州城市特点进行分析:
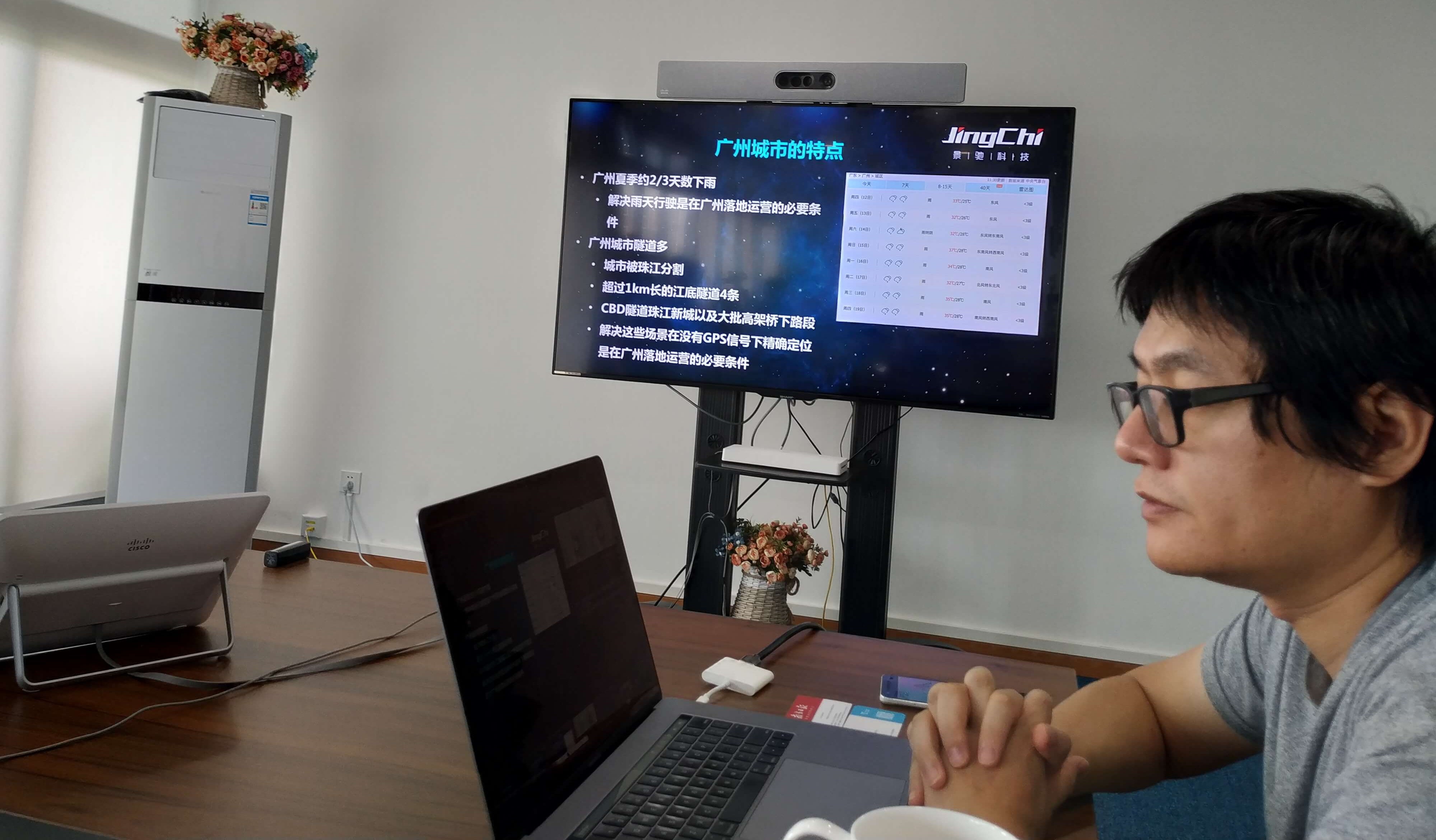
广州夏季约 2/3 天数下雨
解决雨天行驶是在广州落地运营的必要条件
广州城市隧道多
城市被珠江分割
超过 1km 长的江底隧道 4 条
CBD 隧道珠江新城以及大批高架桥下路段
解决这些场景在没有 GPS 信号下精确定位是在广州落地运营的必要条件。
另外景驰还收集了广州雨季以来一个月的图像、激光点云数据,训练可以在大雨天气稳定运行的感知模型。
可见,景驰在本地化上下了很多功夫。
在景驰看来,这种落地模式是可复制的。这种模式如果在一个地区已经成熟,就可以很容易进行模式复制推广到其他城市。但是景驰也提到了,虽然大致思路是这样,但是在实际落地过程中肯定会有技术层面上比如交通指示,气候以及周边环境适配的问题,还是会花费数月之久进行适应磨合。
「本土化+本地化」,这就是景驰发展无人驾驶的模式。
当被问及景驰科技自己的定位是否是技术服务提供商时,钟华很肯定的告诉 GeekCar,景驰的定位不是技术供应商,景驰是一家出行公司,无人驾驶技术是我们的核心。
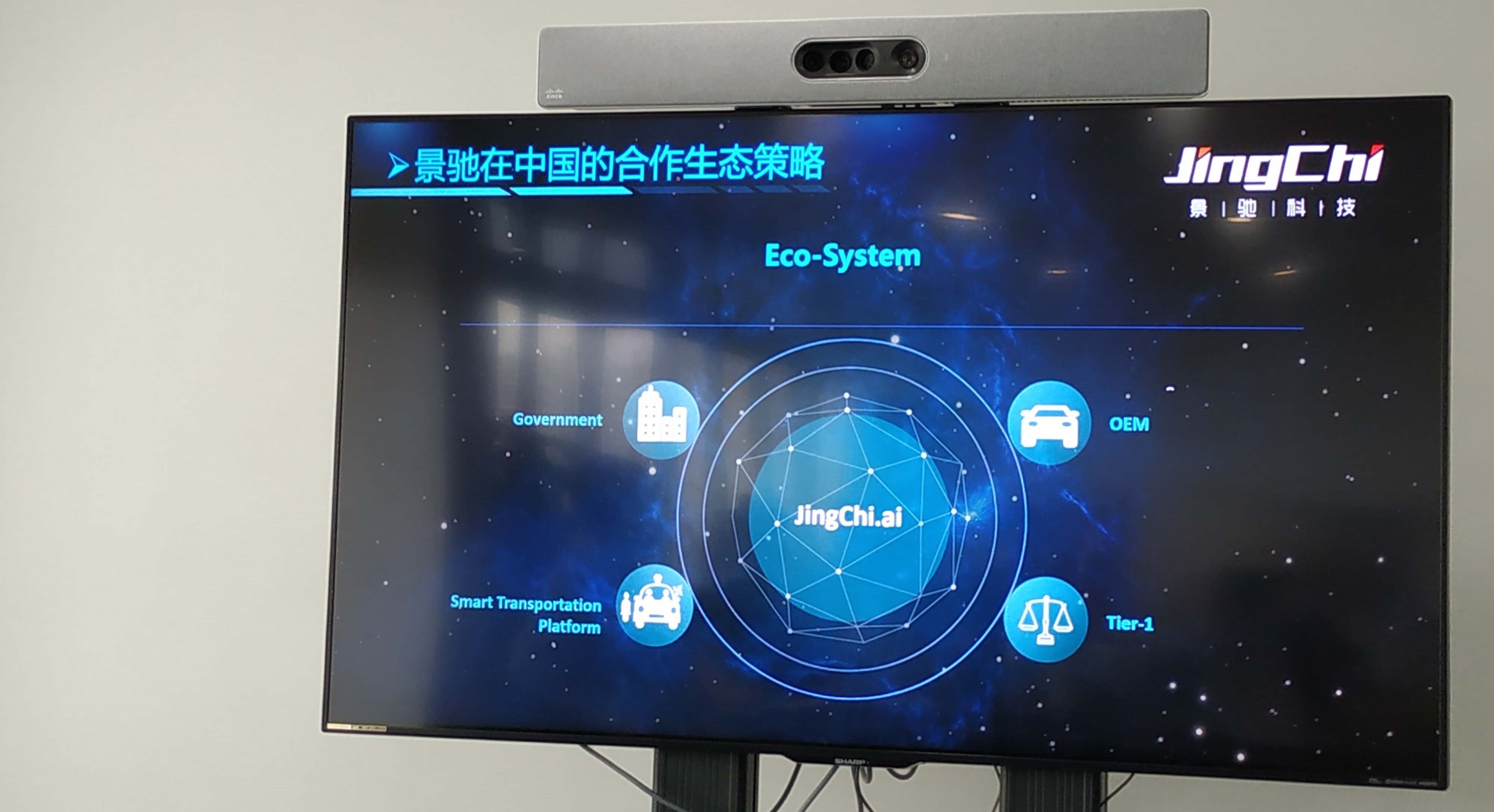
景驰认为,今后无人驾驶行业的生态是这样的:无人驾驶公司+整车厂+出行平台。一个铁三角的关系,当然还有政府这个最重要的环节。
依照这个模式,景驰给出了自己在中国的合作生态策略:景驰+整车厂+Tier 1 供应商+出行平台+政府。
对于与出行平台的合作,张力提出了三种渠道:
出租公司+司机可以过渡安全员+充电桩(自家)
网约车平台
分时租赁(车找人,解决最后一公里)
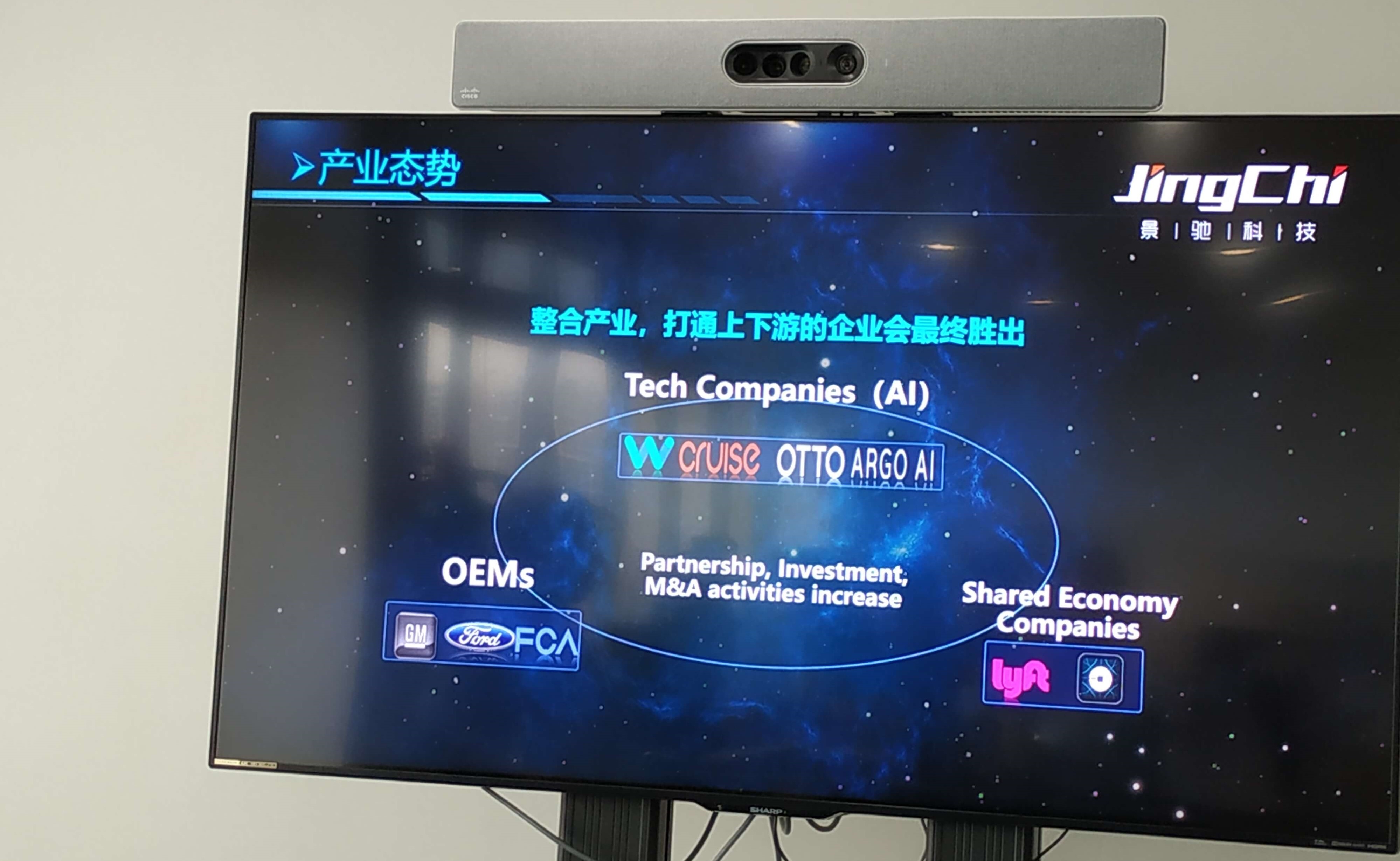
这也是景驰给出的判断:整合产业,打通上下游的企业会最终胜出。目前景驰已经与广汽传祺以及广州当地的一家出行平台达成合作。
未来无人驾驶公司可以活几家?这是我突然想到的一个问题,也是很实际的问题,当我把这个问题抛给钟华时,他的回复是这样的:「这个市场足够大,可以容下众多竞争者,只是市场份额大小而已。」
不知道大家意识到这一点没有,国内以及国际众多的无人驾驶公司,大家的最终目标是相同的,都是为了实现真正的无人驾驶。不同之处在于各家无人驾驶技术进展快慢以及用户体验差异而已。简言之, 这是个快鱼吃慢鱼的生态。谁的动作更快,就将占据更大的主动权。在这个万亿级的市场中抢先夺得高地。
从上面的试乘以及专访内容可以看到,景驰的团队运营、无人驾驶技术研发、商业化模式都比较清晰。于景驰而言,要想尽快在这个无人驾驶的蓝海中占得一席之地,如何与整车厂达成共识、上游供应链的合作以及与第三方出行平台进行渠道打通就显得十分重要。当然,最重要的还是自身无人驾驶技术实力的提升。
「景驰要做中国第一,全球领先的无人驾驶」。这是景驰对自己的期望。要想真正做到这种程度,景驰要走的路还很长。
来源:geekcar
本文地址:https://www.d1ev.com/news/qiye/71931
以上内容转载自geekcar,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号