近年来,随着汽车电子设备的不断向前发展,以智能化、网联化为重要特征的汽车科技创新为汽车产业带来重大变革。人们对智能汽车提出不同的功能需求,如:ADAS辅助驾驶、自动驾驶、车载娱乐、车身监控,促使汽车制造商需要在车内部署众多数量的ECU实现复杂的功能以满足用户需求,而大量ECU的使用需要高速、高带宽、低延迟的车载网络通信,但传统CAN总线难以满足高速、高带宽以及低延迟的需求。因此,为了满足智能化、网联化的发展,在传统以太网的基础上,IEEE提出具有高速、高带宽、低延时的传输特性的车载以太网,促使未来汽车网络从现有CAN为通信基础的网络逐步过渡到以车载以太网为骨干网络的通信网络。因此,国内外大量优秀的企业在从事车载以太网技术的研发,如在国内,以赫千科技为代表企业正在聚焦车载以太网技术研发工作,加速以车载以太网总线为通信基础的产品的量产进程。
CAN总线会被车载以太网总线完全取代吗?
CAN是ISO国际标准化的串行通信协议,它是一种有效支持分布式控制或实时控制的串行通信网络。相比于其它通信总线,CAN的技术特性使其在车载环境中特别有效,参见表1,例如:首先是其对噪声的高容忍度,并得到 CAN 的物理层和协议的支持,CAN 支持原生多播和广播,提供内置帧优先级, 100% 分布式运行,轻松支持数十英尺的长单总线等优点。
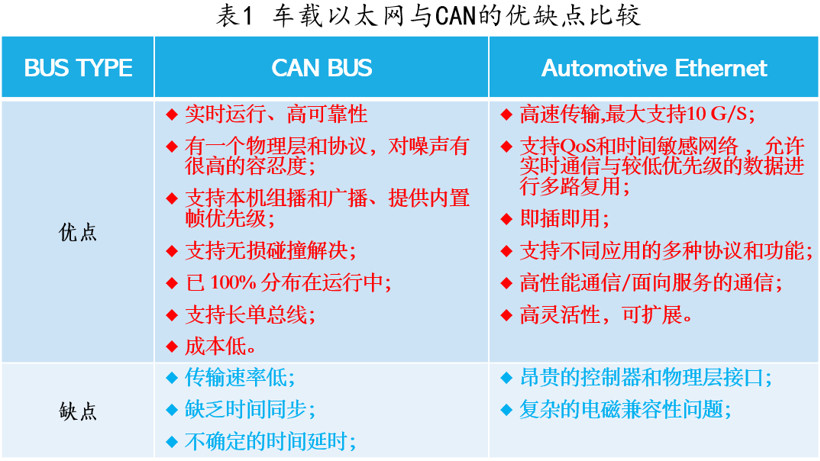
相比于CAN,车载以太网具备高速传输,通过光纤传输可支持10 G/s的传输速率,支持QoS和TSN,允许实时确定性的通信,支持多种不同的协议,支持面向服务SOA的通信并且可扩展。显然,车载以太网与CAN在不同的应用场景有着不同的优势。在目前阶段,为了适配汽车智能化、网联化的功能需求,汽车的E/E架构从传统的分布式过渡为以区域为导向的E /E 架构,如区域包括:智能驾驶域、座舱域、车身域等。基于区域的E/E架构,在骨干网络,采用高带宽的车载以太网进行通信连接相应域控制器或区域网关,在区域网关或域控制器下,可通过多种不同总线CAN、LIN、分支车载以太网连接相应的传感器和执行器。因此,E/E架构的实现需要将 CAN 和车载以太网结合起来一起使用,此外,对于许多传统的汽车网络用例,CAN 仍然更具成本效益。综上所述,未来较长一段时间内,车载以太网与CAN并非是取代关系,而是相互共存。 CAN与车载以太网共存的车载网络中,必然存在CAN ECU与车载以太网ECU的相互通信的需求,但是目前标准中尚未有CAN ECU与车载以太网ECU的数据包进行相互转化的方案。
如何实现车载以太网的SOME/IP数据与CAN协议的数据相互转化?
由于CAN总线与车载以太网总线在较长一段时间内将共存于车载网络,因此需要构建CAN ECU与车载以太网ECU的通信桥梁,确保车载网络的正常通信。为了寻求解决方案,我们通过在权威的专利数据库进行查询,发现上海赫千电子科技有限公司(HingeTech)较早提出一种CAN数据包与车载以太网的数据包的转化方案(授权公告号为:CN111130676 B),其转化方法如下:
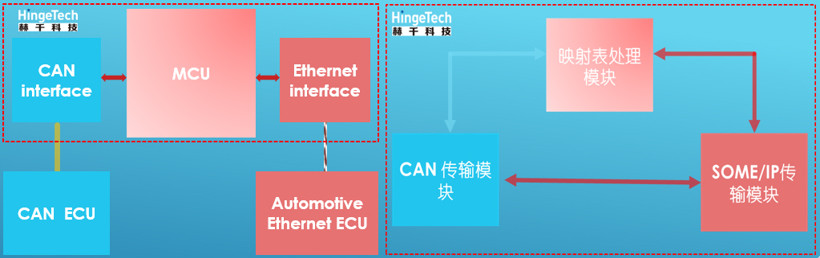
图1 CAN数据与车载以太网的SOME/IP数据转换示意
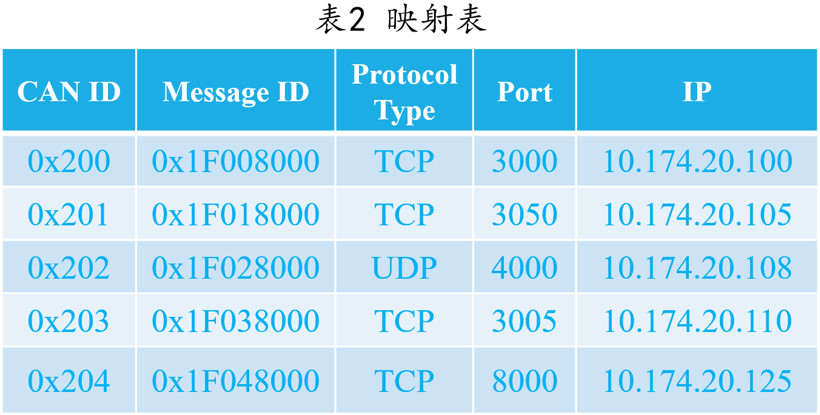
参见图1以及表2,通过设置微处理控制器(MCU),在微处理控制器的两端设置CAN接口和车载以太网接口,微处理控制器负责对CAN数据包、车载以太网数据包的解析,并根据需求封装成对应CAN数据包或车载以太网数据包;微处理控制器包括SOME/IP传输模块、CAN传输模块、映射表处理模块,映射表处理模块连接SOME/IP传输模块和CAN传输模块,用于对SOME/IP协议的信号与CAN协议的信号之间的相互转化进行解码;映射表处理模块包括CAN地址识别码(CAN ID)与SOME/IP的Message地址识别码(Message ID)对应映射表;映射表还包括SOME/IP的信息地址识别码与传输终端的地址、服务端口号等信息。
车载以太网的SOME/IP数据包转化CAN数据包的核心方法包括:SOME/IP传输模块按照SOME/IP协议进行解包,解包过程包括对接收到的SOME/IP协议的信号进行解析并分离出信息地址识别码(Message ID)和载荷信号;然后调用映射表处理模块,解析出与Message ID对应的CAN ID;CAN传输模块将CAN ID和载荷信号按照CAN标准协议进行封装后通过CAN接口传输至CAN总线上。
CAN格式的数据包转化车载以太网的SOME/IP数据包的核心步骤包括:CAN传输模块按照CAN协议进行解包,解包过程包括对接收到的按照CAN协议进行传输的信号进行解析并分离出CAN地址识别码(CAN ID)和载荷信号,然后调用映射表处理模块,解析出与CAN ID对用的Message ID,通过Message ID,SOME/IP传输模块捕获Message ID以及对应的协议类型、端口和IP地址和载荷信号,按照SOME/IP协议的格式进行封装后通过车载以太网接口发送至车载以太网总线上。通过内置的查找映射表,来实现载荷信号的转发,从而连接了车载以太网网络和CAN网络,同时将车载以太网网络节点和CAN网络节点通过该装置互联。
由此可见,赫千科技通过提供车载以太网数据与CAN数据进行相互转化的技术,使得以区域为导向的E /E 架构中CAN ECU与车载以太网ECU能够正常通信。另外,车载以太网的SOME/IP的通信与CAN通信最大的区别在于SOME/IP通信时面向服务,CAN的通信是面向信号的。面向服务的通信能够大大减少网络负载,提高通信效率,因此汽车的Adaptive AUTOSAR采用SOME/IP作为通信中间件的SOA的软件架构。赫千科技在车载以太网研究工作中,针对域控制器、智能座舱、仪表、ADAS辅助驾驶、自动驾驶等应用的SOME/IP通信成功量产了SOME/IP协议栈和自动化的Hinge-Matrix SOA Tool。如图2所示。赫千科技提供的SOME/IP协议栈具备多种功能的支持,例如:支持SOME/IP-SD,SOME/IP,序列化与反序列化,Event, Field;具备高性能:CPU载荷<2%,请求&响应小于1ms;具备高稳定性。
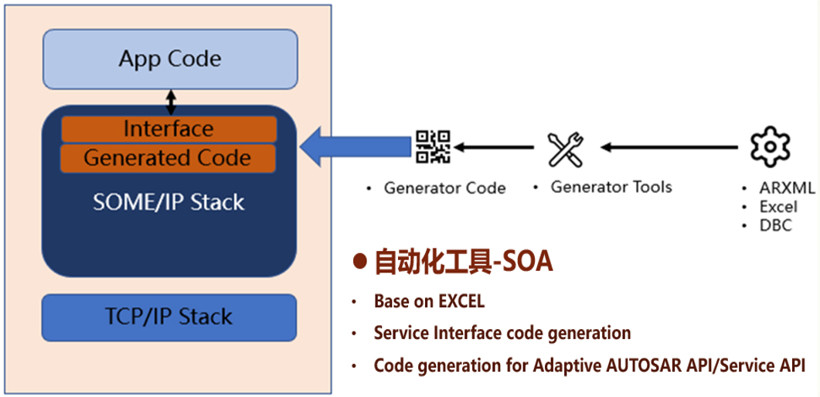
图2 赫千科技SOME/IP协议栈和自动化SOA工具
鉴于当前面向SOA的服务API开发较为繁琐,赫千科技提出Hinge-Matrix SOA Tool,可根据场景快速的定制化生成基于服务API。 Hinge-Matrix SOA Tool,基于多种不同格式的配置文件,如Excel格式文件,通过将Excel格式的配置文件导入Hinge-Matrix SOA Tool,自动产生服务代码,将产生的服务代码导入SOME/IP协议栈,快速完成Autosar API/Service API的开发,大大的缩短软件的开发周期。
综上所述,未来较长一段时间内,车载以太网与CAN网络因各具不同优势,将共存于车载网络中,赫千科技提供的车载以太网的SOME/IP数据与CAN数据的相互转化方法解决了车载网络中车载以太网接口的ECU与CAN接口的ECU的相互通信,为区域为导向的E /E 架构运用奠定坚实的基础,同时也提供相应的SOME/IP协议栈以及SOA快速代码生成工具,从多个方面加快汽车的智能化、网联化的发展进程。
来源:盖世汽车
作者:赫千科技
本文地址:https://www.d1ev.com/news/qiye/188138
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号