作为造车新实力,岚图汽车充分整合东风公司多年的造车技术和优势资源,构建以用户为中心的创新商业模式,打造用户型科技企业,目前岚图汽车已有两款车型上实现量产,分别是SUV岚图FREE和MPV岚图梦想家。
岚图汽车智能驾驶兼底盘开发高级总监付斌以《基于城市场景的地图定位量产开发研究》为主题展开演讲,以下是演讲内容整理:

岚图汽车智能驾驶兼底盘开发高级总监付斌
高精地图和定位的行业背景与量产需求
我主要从整车厂角度对自动驾驶开发过程中对地图定位的一些需求做分享。
首先看一看整个乘用车的销量,截至到2021年,整个中国乘用车销售额已经接近33%,比美国、日本、德国、法国加起来可能都要多,连续13年蝉联乘用车销售的第一名。在智能化、网联化的浪潮推动下,智能网联汽车逐渐接力为整个乘用车的主要增长动力。统计图表可以看出,从L2级功能量产开始近三年,L2和L2+级的智能驾驶功能持续增长,预计到2025年,L2级功能的搭载率可超50%,L2和L2+级的智能驾驶功能的搭载率同样不断增长,也为车载地图定位增长提供了发展的基础。
众所周知,智能驾驶等级按照SAE的标准共分为五级,主要区别点在于人类驾驶员是否参与到整个车辆的决策控制中车载导航和地图的应用都比较早,按照传统的认知,高精地图和定位到L3级的自动驾驶层面才需要应用,但是从目前量产的情况看,高精地图与定位功能在L2+级的智能驾驶车上已经应用了。随地图和定位成本下降,从功能优化和客户体验提升的角度看,以后L2级的智能驾驶车辆也会有对高精定位地图的需求。
接下来分享下岚图汽车的技术路线,岚图是东风集团高端新能源品牌,2019年成立,目前已在两款车型上实现量产,分别是SUV岚图FREE和MPV岚图梦想家。岚图汽车的智能驾驶系统以安全可靠、软硬分离、具备成长性为出发点,从关注用户体验这一基本点出发,岚图汽车的智能驾驶研究团队形成了行车、泊车的核心开发能力,依托面向服务的自研电子电气架构,整个智能驾驶的计算平台正在从低算力向高算力,从L2级典型功能向高速、城区的自动驾驶功能演变。
城市NOA定义与需求
针对地图和定位的应用,典型场景就是城市工况下的导航驾驶辅助,也就是常说的城市NOA功能,城市NOA可以实现城市内点对点的自动驾驶,由三十多个子功能组成,可以实现L3级的自动驾驶。

图片来源:岚图汽车
据统计,90%以上的驾驶员有城区开车的需求。相较高速公路,城区场景更加复杂,比如人车混行。长尾场景较多,比如无保护左转,狭窄道路通行,礼让行人的违规行为,常见的自动绕行,自主过环岛等场景的难度都比较高。
基于以上的各种问题,常用雷达、摄像头传感器感知到的信息并不够,高精地图和高精定位就是非常好的补充。因为它可以对车辆前方和周边道路信息做很好地预知,从而对自动驾驶车辆和周围事件有比较全局地把控。
高精地图与定位在城市中会遇到有挑战性的场景,比如城市峡谷,不同光照环境,半遮挡环境、城市隧道等,这些对高精地图制作和更新的影响都很大。同时,高精地图和高精定位之间的场景影响并不是独立的,复合场景或者交叉场景对地图定位的影响也非常大。
关于高精地图与定位的应用,按技术路线可以分为两类:一类是使用城市的高精地图,基于现有试点的城市部分路段能够量产;一类是基于导航地图进行量产。第一类在整车应用方面,现有高精地图在高速、快速路上应用的方式差不多,但是由于城市高精地图的敏感性,城市的导航辅助功能可能就只能在有高精地图覆盖的部分路段使用。2022年8月份,自然资源部已经公布了北、上、广、深、杭、渝等城市高精地图的应用试点。
第二类导航地图,相比第一类,添加了斑马线、停止线、红绿灯等元素并进行图层映射,这部分工作可以放在整车厂开发过程中应用,也可以让地图供应商提供。近年来,行业内提出了SD pro地图的概念,目的就是解决城市场景NOA中城市内高精度地图覆盖低的问题。
目前高精地图的使用过程中面临一些问题。首先,依据法律法规,在使用过程中只有部分城市的部分路段能够覆盖到高精地图。其次,从数据鲜度讲,城市内行驶里程非常多,全国的高速公路里程加起来只有三十多万公里,城市里程加起来估计得有几百万公里,与此同时,城市道路的维修和更新都比较频繁。这两点对地图数据的及时更新提出了非常大的挑战,尤其是采集制作和更新成本会非常高。
从法规和数据鲜度两个方面考虑,我个人认为在短期内可能无法实现城市高精地图的大规模量产。但是可以先将城市NOA功能在部分城市的部分试点中先运行起来,可以减少高精地图的元素,以现有导航地图为基础,增加自动驾驶所需的地图信息,也就是使用SD pro地图来实现城市NOA的场景覆盖。
SD pro地图vs高精地图
基于对整车的功能的拆解,可以将其对于高精地图的需求具体分为道路属性、车道模型、交通设施三大类静态数据,传统高精地图在这三种类型上都可以提供比较详细的属性信息,而SD pro地图和高精地图最大的区别就是车道模型的属性信息减少了,大部分集中在道路属性和交通设施属性信息中,对于曲率、坡度等车道模型的属性信息都进行了消减。

图片来源:岚图汽车
以上,SD pro地图的主要特征有以下几个方面:一是满足法规的要求,SD pro相当于是高精地图的轻量版,减少了很多敏感的地理信息,更容易满足信息安全、法律法规的要求。二是满足整车的基本功能需求,SD pro地图内容从整体来看都可以满足城市NOA的开发需求。三是成本低,图商可以基于已有的导航地图丰富其他城市NOA所需的道路信息。
整体来说,我认为SD pro地图在智能驾驶地图设计上提供了一些好的思路,有助于城市场景下自动驾驶辅助功能的落地。
城市场景下的高精定位需求与实现
接下来介绍关于高精定位目前的技术情况。单一类型的传感器定位可以分为三种,一是基于信号的定位,二是航迹推算,三是特征匹配。根据城市NOA功能的需求,需要企业针对单一定位的模式提升场景的适应性和定位稳定性。不同的单一定位方式可以满足不同的定位需求,但城市场景下各类情况复杂多变,比如天气和季节的变化、道路和建筑的变化、各类交通参与者的影响、电磁干扰光照等,因此,单一定位无法实现城市复杂的自动驾驶需求,多传感器定位已经是行业主流。
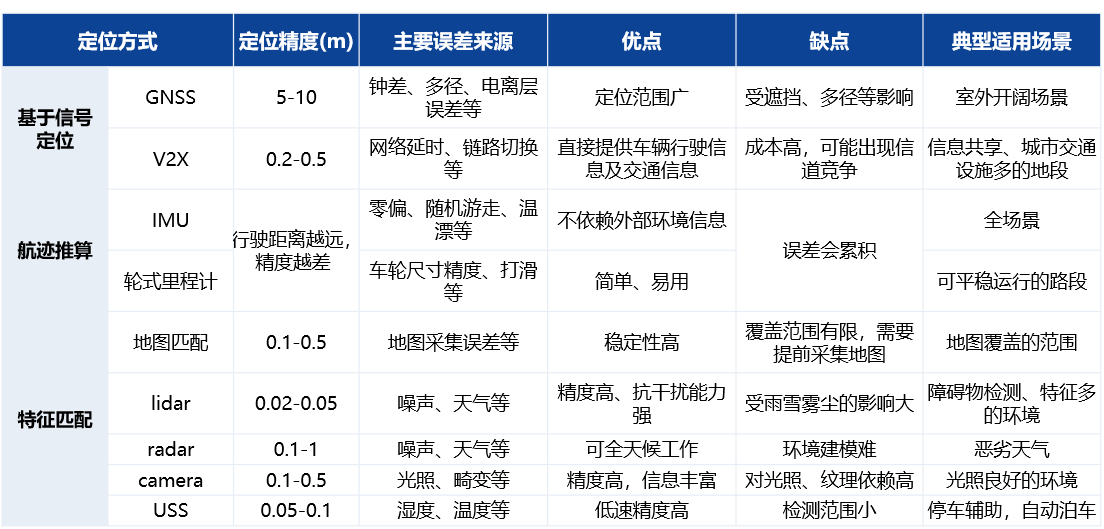
图片来源:岚图汽车
多传感器融合方式也很多样,目前常见的包括视觉感知与激光融合等方式。每家主机厂都会根据自身车辆的特点,选择不同的传感器配置,选择适合车辆的定位方法,但基本目的和所要解决的应用场景相差不太大。下面介绍下岚图汽车融合视觉和激光SLAM在泊车应用上的主要研究内容。
岚图汽车的研究团队通过融合激光点云和图像特征点数据,采用基于稀疏姿态调整的优化方法,对车辆位置进行优化。同时采用基于视觉特征的模型进行闭环检测,进一步优化基于激光点云的格栅地图。相对于单一激光或者视觉定位,融合所达到的定位精度会更高,并可以有效解决激光闭环检测难以实现的问题。
目前融合的方法也存在一些问题需要解决:比如说遇到白墙——没有办法提取到足够多的特征点,这些问题后续要进一步研究。但总的来讲,从整车开发角度看,融合定位的方式更符合比较复杂的场景需求。
回到城市行车场景,介绍下岚图汽车在城市场景下行车定位的研究情况,这一研究的重点在于,发展基于SD pro地图的多传感器融合定位,在地图基础上结合多路相机与BEV感知、特征信息与道路关联,融合组合导航、车身、雷达等多传感器信息。
在路口交汇等有复杂变化的场景下,岚图汽车的研究团队会重点使用SD pro提供的点和道路属性信息进行匹配定位。借助多传感器的输入信息,建立紧耦合的融合模型,进一步提升系统的精度和可靠性,减小融合定位的误差。
针对城市半遮挡和遮挡场景,除了融入视觉定位,也会引入视觉里程计和激光里程计的观测模型,接入轮速和方向盘转角数据,整合多组数据提升融合定位系统的精度,测试证明这种方法可以大幅提升半遮挡和遮挡场景下的定位精度。针对预测模型,在卡尔曼滤波状态方程中,增加25维状态矩阵,用来在线估算IMU安装角度和杆臂值误差,从而避免因IMU的位置变化,导致的定位结果误差。
上述定位系统为城市NOA功能的开发提供了横纵向的定位信息和地图信息,经测试能够满足大部分场景下城市NOA功能的安全运行。下图是城市三种典型场景的对比测试结果,半遮挡和遮挡的场景下,横向定位精度能做到0.5米以内。特别要说明的一点是,将视觉匹配定位结果与DR结果进行深度耦合,其中DR包含轮速、IMU、VO三部分的融合结果,实现全遮挡环境下千分之二的精度目标,达到了目前行业对高精度组合导航的指标要求。

图片来源:岚图汽车
在研究和开发过程中,岚图汽车的研究团队也遇到了一些技术上的难点,在这里给大家做分享,主要是四个方面。
一是场景分析和理解,对场景分析与理解需要基于可靠的场景分析判断,目前主要是借助视觉感知GNSS信息分辨定位场景,但是仍然存在一定的误差与误判。如何构建不同场景之间的关系也是目前面临的比较大的难点。二是定位置信度判断,高速场景对于不同条件下定位系统置信度的判断容错率较高,但城市场景更加复杂,定位置信度会直接影响定位可用性,进而影响智能驾驶系统的用户体验。三是定位系统可靠性验证。四是城市地图鲜度保证,虽然SD pro地图是轻量化的高精地图,还是不可避免地需要及时跟进城市道路的更新情况。
最后提出两个需要探讨的问题:第一,城市场景下V2X如何应用和推广?良好的V2X应用有助于定位精度的提升,基于城市场景的高精地图和定位的应用推广,会有助于推进V2X的发展和推广,对于万用互联,反哺城市建设,改善城市环境也有很大的作用。
第二,城市场景下主机厂和图商在地图定位上如何加深合作?在城市场景下对地图进行采集和更新都是比较大的挑战,整车厂有天然的数据优势,在满足法规的脱敏要求下,与图商合作实现城市地图数据众包,也有比较大的意义。
(以上内容来自岚图汽车智能驾驶兼底盘开发高级总监付斌于2022年9月14日由盖世汽车主办的2022第四届自动驾驶地图与定位大会发表的《基于城市场景的地图定位量产开发研究》主题演讲。)
来源:盖世汽车
作者:荟荟
本文地址:https://www.d1ev.com/news/qiye/185828
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号