什么是车载以太网?为什么汽车的智能网联、自动驾驶、无人驾驶、乃至智能座舱等功能的开发都离不开车载以太网?下面,就让我们对车载以太网进行一个简要介绍,车载以太网是一种用以太网连接车内电子单元的新型局域网技术,传输介质采用单对非屏蔽双绞线或光纤,传输速率100Mbit/s ~10Gbit/s,同时还满足汽车行业对高可靠性、低电磁辐射、低功耗、带宽分配、低延迟以及高严苛时间同步实时性等方面的要求。国际上,以博通、恩智浦、宝马等公司为代表进行了车载以太网相关的配套产品开发,目前已经有部分中高端车型采用车载以太网进行通信,如奥迪A8采用车载以太网为骨干网络的通信架构,大众ID4采用车载以太网的360全景影像。在国内,以上海赫千电子科技有限公司(HingeTech)为代表的企业专注车载以太网的全栈技术研究,赫千科技自成立以来就聚焦于车载以太网的配套产品开发,为汽车智能网联、ADAS、自动驾驶、无人驾驶等功能开发提供基于车载以太网为骨干网络的通信大动脉。图1为一种基于车载以太网为骨干网络的区域网关架构的示意图,域控制器(Domain controller),如自动驾驶域控制器、座舱域控制器等,车身周围的环境感知传感器,如:车载以太网摄像头(Eth Camera)、车载以太网毫米波雷达(Eth mmWave radar)、车载以太网激光雷达(Eth Lidar)等,根据需求,域控制器通过车载以太网总线连接TSN网关与中央计算平台(Central Computing Platform)或环境感知传感器交换数据,环境感知传感器采集环境数据后通过车载以太网总线传输至对应的TSN网关进行数据交换,然后相应的TSN网关将对应的数据通过车载以太网总线传输至中央计算平台进行运算处理,或中央计算平台对数据进行运算处理后通过TSN网关传输至域控制器进行决策或车载以太网显示屏(Eth Screen)进行显示,同时TSN网关兼容CAN、CAN-FD通信,通过CAN总线、CAN-FD总线与相应CAN ECU进行信息交换。
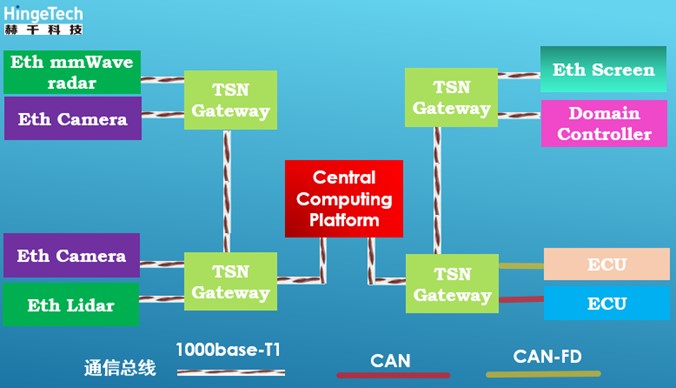
图1 基于车载以太网的区域网关架构
试想想,若图1中的区域网关架构并未采用车载以太网总线进行连接,而是采用传统的CAN总线、FlexRay或MOST总线进行通信,若该架构被装配有L4/L5的自动驾驶功能的车辆采用,则可能会出现多个摄像头、激光雷达之间的时间同步不够精确而导致图像数据与点云数据不匹配,座舱域控制器显示屏的驾驶策略与扬声器发出的提示声音可能不同步,或者传感器采集感知数据传输到自动驾驶域控制器的时间延迟达不到要求,那么无疑该L4/L5的自动驾驶功能的车辆仅仅停留在演示的Demo车,无法真正实现L4/L5的自动驾驶功能。因此,车内网络中各节点精确的时间同步对于实现L4/L5的自动驾驶功能是非常重要的,而基于车载以太网为骨干网络的通信具备时间同步功能,能够满足要求。
现阶段基于车载以太网的时间同步功能是基于gPTP协议进行的,但在实际应用中由于异常情况等原因导致时钟同步信息消失,进而使得时钟同步中断,如何在时钟同步信息丢失后快速进行同步仍然是车载以太网的时间同步功能需要解决的关键性问题。为了搞清楚车载以太网的时间同步技术的改进路线,我们在国家的专利数据库中查询车载以太网的时间同步技术的相关专利,通过查询使我们了解到了,在国际上,韩国的现代自动车株式会社申请了较多的车载以太网的时间同步相关的专利。在国内,高校和研究所中,同济大学申请了车载以太网的时间同步的专利。在企业中,上海赫千电子科技有限公司(HingeTech)拥有较多的车载以太网的时间同步的授权专利。比较有意思的是,我们阅读了上海赫千电子科技有限公司中的时间同步专利的相关专利,恰好发现其中一件专利号为201911214729.8,名称为一种应用于主时钟与从时钟的时间同步修正方法、装置的专利,该专利针对基于gPTP协议的时钟同步信息丢失后如何快速进行同步提供一种确实可行的解决方案,具体要点为:
从时钟接收主时钟发送的同步时间消息后,计算主时钟与从时钟的时钟偏移量,并通过时钟偏移量对从时钟进行时钟偏移修正但不修正从时钟的时钟频率;当在指定的时刻后,才同步进行时钟偏移和时钟频率偏移修正。
以预设的调频时间作为起始位置,并在预设的时间段内对主时钟与从时钟的时钟频率偏移量进行追踪,对主时钟与从时钟之间的时钟频率偏移的趋势进行预估;
例如:根据用户需要设置测量时长,假设经历了Ts_2至Ts_k的测试时长,在测试时长对主从时钟进行修正,具体计算公式如下:

其中,公式(1)中,Offset_i为第i次的时钟偏移量,其中,i从第2次开始计算;公式(2)中,Offset_total为Ts_2至Ts_k这段预设时长内的所有主从时钟的时钟偏移量。
因此,根据公式(1)至公式(4),计算时钟频率的校正结果对从时钟的时钟频率进行校正,从而使得主时钟与从时钟保持精准时钟同步。
根据赫千科技(HingeTech)公开专利提供的实测数据,分别采用赫千科技HigPTP的时间同步校正方法与现有技术中的LinuxPTP的时钟同步校正方法进行对比,如图2所示,结果显示采用LinuxPTP方法,经历10min后,时钟偏移量从初始的31477ns变为95344ns,相差为95344ns/10min,换算成秒则为99.8nm/s。但是当采用HigPTP的方法,经历10min后,时钟偏移量从初始的31044ns变为23243ns,相比于LinuxPTP方法,时间差降低为7801ns/10min,换算成秒则仅为13nm/s,时钟同步的精度提升约8倍。因此,经过HigPTP时间同步后,主时钟和从时钟的时间同步精度相对于现有技术有较大的提升。

图2采用赫千科技提供的HigPTP方法与现有LinuxPTP方法对主时钟和从时钟进行校正的结果对比
根据上述介绍可以知晓,目前国内外较多的机构和企业仍然在专注于车载以太网的精准时间同步技术研究,如图3展示的集中式的区域网关架构采用车载以太网的时间同步方案,假设为HigPTP方案,可以看出以自动驾驶域控制器作为主时钟,根据主时钟,采用HigPTP方案同步车载以太网摄像头和车载以太网激光雷达的时钟,同时,同步TSN网关的时钟。由于TSN网关通过车载以太网总线与不同的域控制器相连接,选择TSN网关作为主时钟,通过HigPTP对动力域控制器、底盘域控制器、车身域控制器、座舱域控制器的时钟进行精准同步。通过HigPTP的时钟同步方法,能够完成车载以太网为骨干网络的各节点的时钟精准同步。

图3 基于车载以太网为骨干网络的精准时钟同步技术方案
若装配有L4/L5的自动驾驶车辆采用HigPTP方案,由于具备精确的时间同步功能,则车载以太网激光雷达、车载以太网摄像头的时钟能够精确同步,使得点云数据与图像数据能够做到同步采集,精确匹配。传感器采集的感知数据传输到自动驾驶域控制器的延迟能够可控,座舱控制器播放的提示音能够与画面显示的内容始终保持同步,那么该L4/L5的自动驾驶功能的车辆成为真正意义具备自动驾驶功能的车辆。由此可见,车载以太网对汽车智能网联、ADAS、智能座舱、自动驾驶等功能至关重要,幸运的是目前国内已经有赫千科技等许多优秀的高科技企业在从事相关方面的研究并量产配套产品,伴随着汽车的智能化不断向前推进,相信不久的将来,以车载以太网总线为骨干网络的配套产品一定会在汽车的智能化浪潮中开枝散叶。
来源:盖世汽车
作者:忻文
本文地址:https://www.d1ev.com/news/qiye/183597
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号