智能时代,我们听到了无数关于出行的畅想,而自动驾驶正是连接现实与未来的关键入口。
在自动驾驶系统运作全链路中,感知作为先手环节,拥有着不言而喻的重要性。加之近年来深度学习和算法技术的突破,感知也成为自动驾驶四大核心模块中发展最快、提升最大的一个模块;乃至于成为了车路协同发展的驱动力之一。
从 2016 年开始,商汤科技(SenseTime,以下简称商汤)就凭借着视觉感知技术的先发优势,拿到了自动驾驶领域的入场券,并逐步将感知能力拓展到了其他传感器。
四年之后,商汤在这一领域的探索结出了新的果实。
 11 月 26 日,在 2020 世界 5G 大会期间,商汤发布了全新的智慧出行解决方案,其中包括 L4 级智能网联接驳小巴,以及具备多传感器融合感知能力的智能路侧感知解决方案。
11 月 26 日,在 2020 世界 5G 大会期间,商汤发布了全新的智慧出行解决方案,其中包括 L4 级智能网联接驳小巴,以及具备多传感器融合感知能力的智能路侧感知解决方案。
随着这一解决方案的发布,商汤的打法逐渐明晰——以感知能力为载体,「车」和「路」两方面为切点,将自己原创的 AI 技术沉淀移植到自动驾驶领域,支撑起智慧出行的蓝图。
基于商汤对自动驾驶以及智慧出行的思考,新智驾近日与商汤研发执行总监石建萍进行了一场深度对话。
商汤在感知层面的能力如何移植到自动驾驶?在自动驾驶领域的多年探索如何落地?相应的成果如何融入到商汤智慧城市的大版图?
这些问题,如今都有了切实的答案。
布局自动驾驶小巴赛道
毫无疑问,自动驾驶技术的应用将真正改变未来交通与出行的形态,但从时间上来说,想要实现完全意义上的自动驾驶仍然是个漫长的过程。
而且,随着自动驾驶的发展历程进入中场,单纯做 demo 的意义已经弱化。落地,乃至于支撑起长线发展的任务,俨然成为了赛道玩家现阶段更加关注的问题。
商汤 L4 级智能网联接驳小巴的问世,正投射出这家 AI 独角兽对技术落地的独特思考。
在与新智驾对话的过程中,石建萍说道:
目前,市场对载人(多人出行)车型有很大的需求。而且,基于示范区场地的优势,小巴实现运营闭环的速度更快。
换言之,小巴是一个天然的中低速自动驾驶场景,在满足多人出行需求的基础上,便于做安全边界管理。
 相比之下,Robotaxi 以轿车为载体,属于私人出行,载客量小;此外,Robotaxi 现阶段的发展可能面临着更复杂的工况以及更高的技术要求。
相比之下,Robotaxi 以轿车为载体,属于私人出行,载客量小;此外,Robotaxi 现阶段的发展可能面临着更复杂的工况以及更高的技术要求。
不过,石建萍也透露,由于技术不断发展成熟,商汤未来也会在时机适宜的时候布局小巴之外的赛道。
除了对落地的赛道精心选择,商汤打造接驳小巴的传感器配置也被充分考虑和权衡。据介绍,目前正在进行示范运营的商汤接驳小巴搭载了摄像头、雷达等主流传感器,但整体的成本并不算高。
对此,石建萍告诉新智驾,综合小巴面临的工况和速度区间(通常在 20-50km/h),商汤会进行传感器范围计算,来预估在确保安全的提前下,感知距离以及精度的情况," 激光雷达虽然只搭载了两颗,但已经能够满足商汤对接驳小巴可靠性的需求。"
她进一步补充说道:
更多的传感器确实可以提供更多的安全冗余,但我们在落地的同时也要考虑,什么样的成本是可以被接受的,是可以去做持续迭代的。
商汤 L4 级智能网联接驳小巴
基于搭载的 L4 级自动驾驶系统以及与路端设备的协同,商汤接驳小巴能够识别车道线、交通信号灯状态,智能预测交通参与者的运动方向,并及时做出决策和路径规划。借助人脸识别和 3D 环境感知技术,小巴还可以准确识别车内人员数量情况以及车内环境,帮助实现车内安全管理。
目前,商汤科技 L4 级智能网联接驳小巴已在江苏(无锡)车联网先导区落地。明年,小巴车将将会进一步增大数量,相关的乘客接驳工作也会进一步展开。
「可插拔模块」的技术路线
不难看出,在多个行业落地后,自动驾驶俨然成为了商汤要攻占的下一个目标。
尽管商汤多年来在这一领域十分低调,但其在 AI 图像识别方面的能力,还有数年探索而累积的经验,早已为布局自动驾驶打下了坚实的根基。
 上图为商汤视觉感知效果图
上图为商汤视觉感知效果图
目前,已经在日本常总市、中国杭州及上海临港等地进行路测,实现在半开放场地内的无接管自动驾驶。
然而,仅依赖路测来推进自动驾驶进程是远远不够的。为了打破时间和测试规模等方面的局限,赛道上的玩家开始将目光转移到虚拟世界,即通过仿真测试来检测自动驾驶汽车的稳定性和安全性。
石建萍表示,商汤在这一方面也已有部署:
除了导入实车路测时所收集的数据,商汤还研发了一个虚拟场景生成引擎;在这两条路径的基础上,商汤还会对不同的场景进行编辑,比如对车速、行人行为、周围环境等参数进行微调,以训练传感器和车辆。
" 基于上述方式,我们的仿真测试目前已经能够覆盖路测时遇到的 50%-70% 的问题。" 石建萍说道。
但需要注意的是,商汤此前种种对自动驾驶的探索,更多的都聚焦于乘用车之上。那么,这些积累如何移植到本次的小巴车型?
事实上,在自动驾驶感知系统搭建之初,商汤就确立了「可插拔模块」的技术路线,并且已经经过了多次迭代和大量的拆解测试。由此,商汤的感知系统被赋予了较强的可拓展性,可以兼容不同的传感器配置,从而实现不同车型的快速部署。石建萍强调:
对于不同的车型来说,我们需要解决的问题就是,对车辆的底盘线控进行调试和调优。
本次商汤接驳小巴的落地也在一定程度上印证了「可插拔模块」技术路线的优势。新智驾了解到,从小巴出厂到上路路测,商汤只花了两个月不到的时间。
而且,基于对感知系统、传感器硬件的理解和把握,商汤已经搭建了智能驾驶软硬件研发平台,可以实现不同车型,以及辅助驾驶系统和自动驾驶系统之间的灵活应用。
尽管许多技术问题已经在当下被解决,但在实际的路测过程中,商汤接驳小巴可能会遇到一些新的问题。因此,现阶段小巴的驾驶座上还需要有安全员存在。
在石建萍看来,现在大家都是在「一边看,一边做」,只有这样最终才能把事情做起来。" 我们需要留一些时间给技术发展以及法律法规的制定。"
她也向新智驾透露,商汤已经在推进硬件稳定性的检查和提升,包括传感器自检模块的打造;同时,在接驳小巴实现闭环运营的过程中,系统在紧急工况下的处理方式,以及人工接管的情况都会记录下来,以便于迭代系统的性能。
路端智能化升级的思考
正如上文所说,现阶段的单车智能尚存许多需要解决的问题,车路协同的方式开始被提到国家战略的高度。
而路端设备是帮助「车」与「路」协同起来的直接载体。
从整体的情况上来看,现阶段车路协同的感知主要还是依赖于摄像头,在大雨大雾等恶劣天气时,可能会影响路端设备为车辆提供信息的准确度。
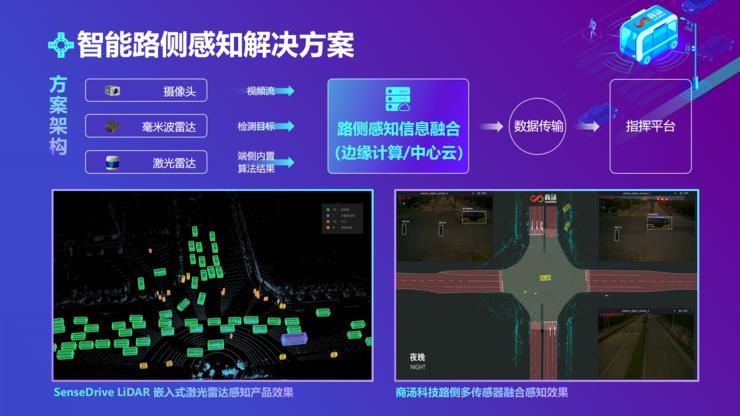
对此,商汤也向外界表达了其对于路端智能化升级的思考——商汤打造了基于 FPGA 的 SenseDrive LiDAR 激光雷达嵌入式感知方案,可以高效处理激光雷达点云数据,对道路上的交通参与者及其他动态物体进行高精度的检测和跟踪。
 有了激光雷达的加持,路侧设备拥有了更强大的感知能力,但问题也随之而来:
激光雷达价格不菲,而且,在风吹日晒的 24 小时不间断工作的路侧,其损耗情况可能更显著。
有了激光雷达的加持,路侧设备拥有了更强大的感知能力,但问题也随之而来:
激光雷达价格不菲,而且,在风吹日晒的 24 小时不间断工作的路侧,其损耗情况可能更显著。
对于这个问题,石建萍回答道:
商汤激光雷达的解决方案是有选择地去部署在路况复杂、事故频发的路口。在长直道路上则可以使用成本相对低于的传感器,以此来做一个权衡。而且,现在几万元的激光雷达也是非常好的选择,尽管会比纯摄像头的方案更高,但并不像外界想象得那么可怕。所以,成本问题还是相对可控的。
她进一步补充:
激光雷达本身的设备成本其实并没有那么昂贵,主要是体量没有上来,因此价格也没有降下来。如果我们能够在路上进行大范围的部署,也能够去推动车载激光雷达回归到更合理的价格区间。
商汤 SenseDrive LiDAR 嵌入式激光雷达感知产品效果
为了确保激光雷达准确无误地为车端提供定位和超视距的能力,商汤在设计系统时也充分考虑了冗余和备份,可以接受不同链路上一定概率的误差;同时也会和产业生态进行有效结合,保障整个系统的安全性和稳定性。
据石建萍介绍,目前,商汤正与禾赛共同推动激光雷达的路端应用,并且已在上海临港部署应用。
新智驾总结
无论从何种角度来看,商汤对于智慧出行已经有了自己的理解,以及一套清晰的打法。
而且,年初新基建政策的出台将 AI、5G、大数据等与自动驾驶强相关的新兴技术提上国家战略的高度,为整个产业的发展孵化了新的机遇。
商汤 L4 智能网联小巴的研发以及激光雷达路侧解决方案的打造,更像是在新时代潮流下自然而然孕育出来的果实。
尽管自动驾驶和车路协同都是需要巨大的人员和资金投入,同时部署这两条路径可能会面临相当大的压力。但商汤此前在这些领域都有了一定的基础,已经实现了从 0 到 1 的转变。
同时,对于自动驾驶和车路协同的进一步部署,又能够反过来融入到商汤智慧城市的规划当中,去与公司的整体业务协同。
雷锋网雷锋网雷锋网
来源:雷锋网新智驾
本文地址:https://www.d1ev.com/news/qiye/133188
以上内容转载自雷锋网新智驾,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!





 京公网安备
11010502033163号
京公网安备
11010502033163号