
麻省理工学院媒体实验室(MIT Media Lab)的研究人员已经研发出一种全新的图像系统,这一系统能够测算出被浓雾覆盖且人眼看不清的物体的距离。
麻省理工学院媒体实验室研究这种图像感应系统的主要目标,就是要把相关的技术整合到无人驾驶汽车之中,这样,即使是在恶劣天气环境下,无人驾驶汽车也能够避开障碍物,不会撞上这些障碍物体,从而避免碰撞车祸。
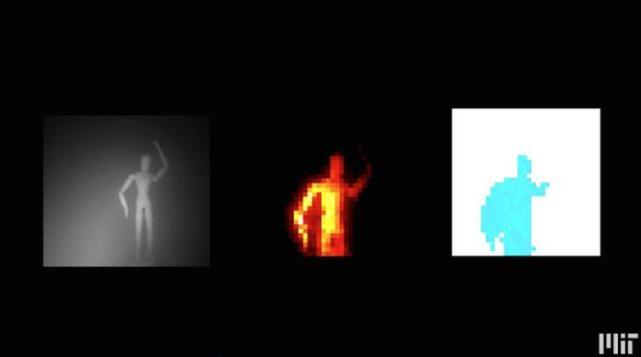
这种图像感应系统利用“飞行时间(TOF)”照相机技术,这种相机技术可以对着物体发出激光短脉冲,然后再测算出激光从物体返回所需的时长。一般而言,浓雾会分散激光,让无人驾驶汽车很难识别,但是,研究人员研发出一种算法,找到了让分散激光显示障碍物距离的方法。
在麻省理工学院媒体实验室的相机文化部门(Camera Culture Group),研究人员模拟了浓雾状态下开车的场景,而且这种雾要比汽车真实自然环境下遇到的大雾浓很多。在这样的环境下,研究人员对上述系统进行了测试。测试结果表明,该系统表现要比人眼观察交易好得多。事实上,在此前的这种环境下,多数图像系统的表现都较差。
无论如何,一个能与自然人驾驶员处理浓雾障碍相媲美的导航系统,对无人驾驶汽车而言,肯定是一个巨大的突破。
来源:盖世汽车
本文地址:https://www.d1ev.com/news/jishu/66041
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号