3 月 18 日晚十点左右,在美国亚利桑那州坦佩市,发生了一起 Uber 自动驾驶车辆碰撞行人致死事故,这不是全球第一起自动驾驶车辆引起的事故,但却是第一起导致行人死亡的事故。
目前,警方公布了最新的证据,来自肇事车辆上的视频数据,拍到了事故发生时,车内和车外两个场景的情况。
根据这个视频,来看简单的场景分解。

根据以上的资料,我们来看一下事故发生时的具体情况:
1、光线环境:整个事故发生的时间是晚上十点,只有路灯照明,行人的位置刚好处于路灯覆盖范围的边缘处。2、道路环境:路面是一条普通的双车道和非机动车道,没有红绿灯或者人行道,事故过程没有经过任何的岔路口。除了行人和肇事车辆以外,没有出现其他的行进中的物体。3、车辆距离及行驶速度:行人推着自行车横穿两个车道,视频拍到了行人在穿行第二个车道的过程,第二个车道通行过程为 2 秒左右。以此推测,行人整个横穿过程可能在 4-5 秒。据警方消息,车辆行驶速度为 38 英里/时 ( 61 公里/时 )。根据车道 2 米及通行过程 2 秒来看,行人速度推测为 1m/s 。所以从行人开始步入车道,车辆距离事故发生地大概 68 - 85 米范围。4、障碍物颜色:行人身着黑色上衣,蓝色裤子,黄色帽子,推着一辆红色的自行车。5、安全员情况:坐在前排,系着安全带,大部分时间没有看路面。在最后时刻看到路面的时候,车辆已经发生碰撞,不存在接管的问题。6、车辆情况:Uber 改装的沃尔沃 XC90 上搭载了 Velodyne 的 HDL-64 激光雷达,还有摄像头等其他传感器。 Velodyne 官网显示 HDL-64 探测距离为 120 米,包含了事故发生距离范围。虽然行人服装颜色鲜明,但由于光线原因,摄像头可能难以检测到行人情况。
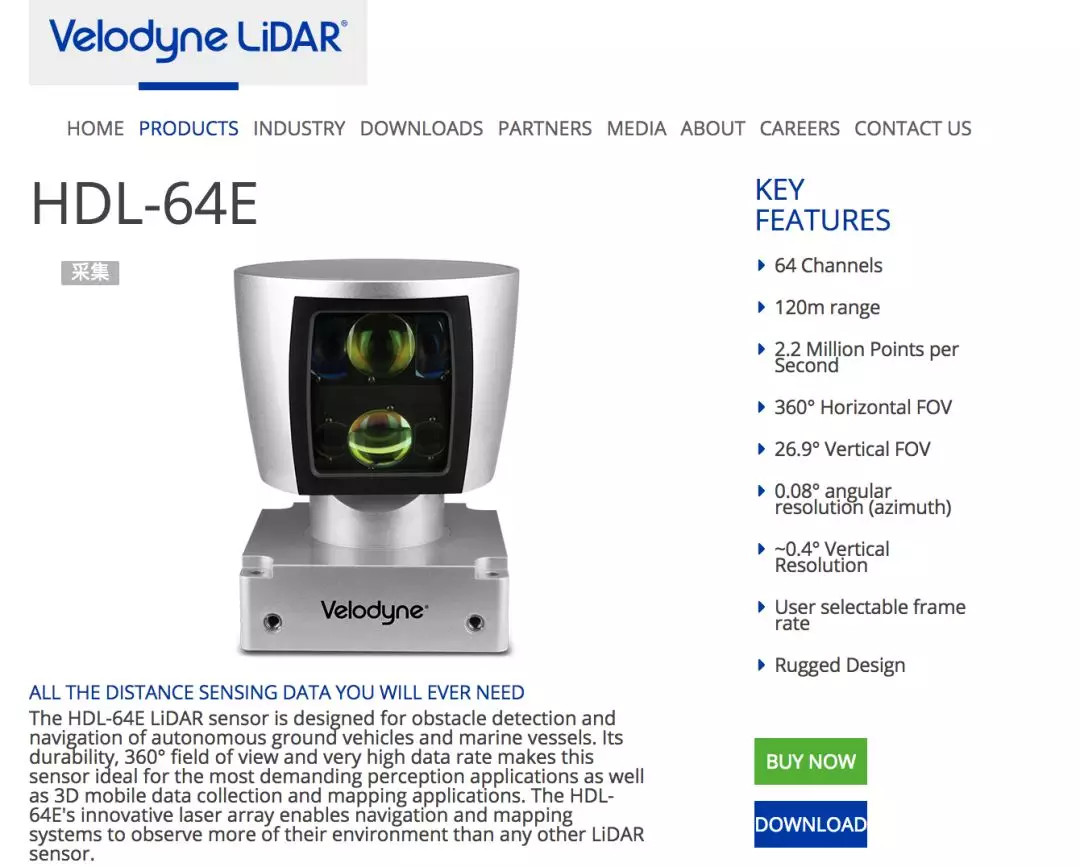
Velodyne 官网截图
咨询了一下佐思产研的研究总监周彦武,在这个场景下,激光雷达是能够探测到的,但是由于 Uber 算法用摄像头的视觉优先处理行人,所以没有及时反应过来。也就是说自动驾驶车辆之所以没有及时作出反馈,可能是算法融合的问题。 另外,周总也提到,目前大部分的算法都是用视觉检测行人,很少用到激光雷达。如果是这样的话,可能大部分的自动驾驶算法都不能满足该事故的情况?那么,像 Uber 这种案例应该也算是一个典型案例。
最后,关于这起事故,没有一直保持注视路面的安全员该不该为这起事故负责,我们还是交给警方。在这个内容里,我们只探讨处于自动驾驶车辆的位置,目前的技术存在哪些局限性?是否可能避免?以及是否该对车辆上的安全员做严格的规范管理?
来源:第一电动网
作者:42号车库
本文地址:https://www.d1ev.com/kol/65386
本文由第一电动网大牛说作者撰写,他们为本文的真实性和中立性负责,观点仅代表个人,不代表第一电动网。本文版权归原创作者和第一电动网(www.d1ev.com)所有,如需转载需得到双方授权,同时务必注明来源和作者。
欢迎加入第一电动网大牛说作者,注册会员登录后即可在线投稿,请在会员资料留下QQ、手机、邮箱等联系方式,便于我们在第一时间与您沟通稿件,如有问题请发送邮件至 content@d1ev.com。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!








 京公网安备
11010502033163号
京公网安备
11010502033163号