如果把时针拨回半年前,会发现小鹏似乎把每一步都走对了。
一是爆款车。小鹏 MONA M03 交付量超 5 万台,小鹏 P7+上市首月交付量破万;
二是智驾热。端到端大模型落地后,又推出了 AI 鹰眼智驾方案,开启高阶智驾标配时代;
三是 AI 潮。全面拥抱 AI,这一决心正得到了行业多数玩家的共振。
在小鹏努力与智驾划等号时,它惊喜发现,市场需求也在与智驾紧密绑定。
这一天比预想来得快很多。小鹏自动驾驶产品高级总监袁婷婷告诉汽车之心,今天小鹏 P7+车主选择这台车,核心原因就是智驾。
小鹏的确在国内智驾史上拥有一定话语权,何小鹏曾放言,小鹏汽车的十年,就是中国智驾的十年。
具体而言,小鹏扮演了「领头羊」角色。小鹏是国内率先实现端到端大模型落地,从「全国都能开」向「全国都好开」成功过渡的车企。
这其中包括一些敢为人先的事情。
比如 2024 年头部选手都在卷「车位到车位」时,小鹏早在 2021 年就已经尝试了「VPA+NOA」的拼接法解题思路,但发现体验不流畅,于是选择用 NGP 一套大模型打通全场景,实现落地。
小鹏 P7+推出「车位到车位」功能,11 月 15 日开启内测
相比于其它玩家依靠强记忆实现「车位到车位」,小鹏的方案只需依靠普通导航,就可以实现园区和停车场内的丝滑行驶。
2025一开年,小鹏在国内首发了园区智驾漫游功能,车可以直接在任意园区「漫游」,像人一样自寻「方向」,全国所有陌生园区泛化的「车位到车位」雏形初具。
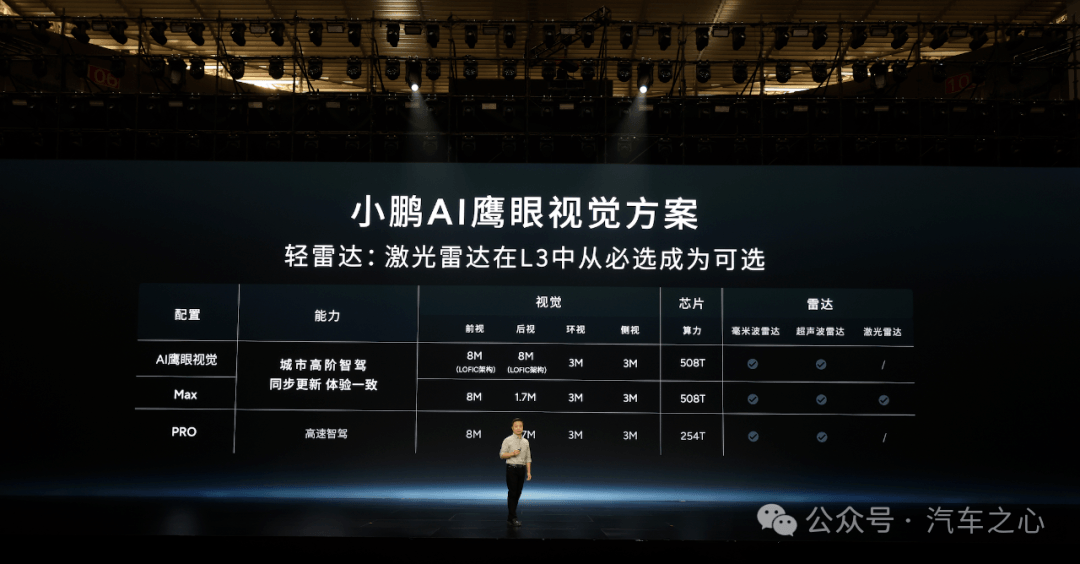
以及,小鹏挥起了视觉大旗,将视觉方案做到与激光雷达方案同等智驾能力,并在小鹏 P7+车上不再区分智驾车型,所有版本标配。
按照小鹏端到端四部曲的既定步伐,2025 年将基于 L2 硬件实现类 L3 智驾体验,2026 年将在部分低速场景下实现 L4 级别的自动驾驶。
袁婷婷表示,在参数量与性能体验构成的坐标系中,小鹏仍处于 Scalling law 的左下角,但以一种非常快的速度向前走。
Scalling Law(规模法则),指模型性能会随着数据集规模、模型参数量和计算能力的增加而不断提升,对自动驾驶模型迭代有重要的指导意义。
在行业都在沿着这条技术主轴向前进阶时,小鹏虽然冲在最前面,但袁婷婷认为,这还远未到终点。
2024 年 6 月,曾在阿里达摩院自动驾驶实验室担任业务运营负责人的袁婷婷,加入小鹏,担任自动驾驶产品高级总监,直接向李力耘汇报。
小鹏自动驾驶产品高级总监袁婷婷
她表示,加入小鹏的最大感受是一致性,从何小鹏至数千人研发团队,所有人对自动驾驶有着极强的信念感,笃定驶向自动驾驶终局。
目前,研发团队一面基于 AI,专注打造 AI 底座;一面基于用户,专注产品打磨,双向紧密结合。
在袁婷婷看来,小鹏自信且谦逊,这份谦逊体现在对于用户体验的重视,即产品既保证安全下限,也支持上限能力的无限延伸。
以下为汽车之心与袁婷婷的对话(在不改变原意的情况下进行了删改)。
01、用一套 NGP 打通「车位到车位」,有何不同
汽车之心:最近大家都在谈「车位到车位」,小鹏的「车位到车位」与其它玩家有什么不同?
袁婷婷:在 2021 年的 7 月份小鹏官方微博上,我们首次提到了「车位到车位」,当时基于 VPA(记忆泊车)+城区智驾+VPA(记忆泊车)三段合一的技术路线做了一次「车位到车位」零接管演示,这可能是国内最早版本。
但当时在泊车和行车的链接过程中,切换时会出现卡壳的情况,所以也没有量产提供给用户。
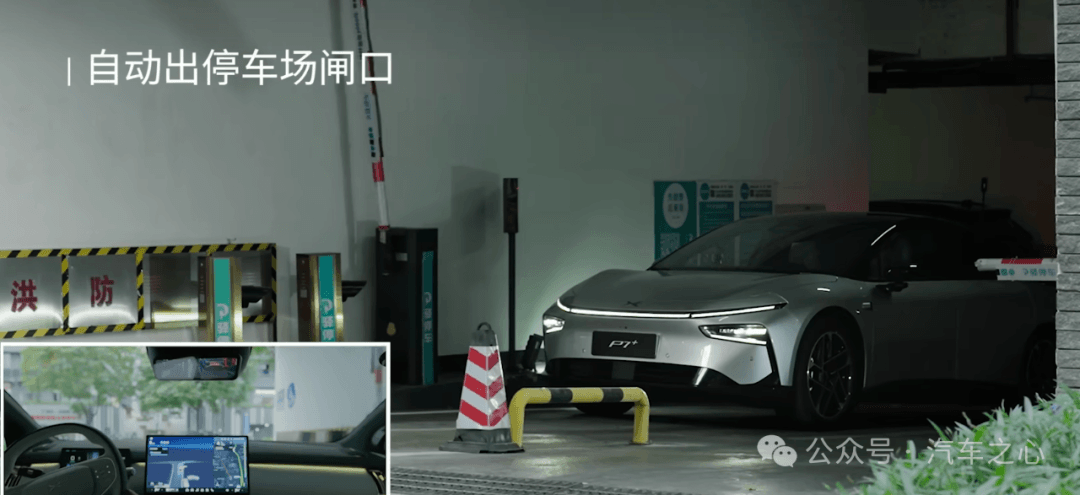
从 2023 年开始到现在,小鹏汽车实现了端到端模型的关键突破。我们发现将「车位到车位」融合在一个大框架内,园区和城市道路连接会更加顺畅,它包含了过闸机、过 ETC 的能力。
虽然都是车位到车位的功能,但是在 2024 年和 2021 年发生了巨大的不同,让用户有了更好体验。
小鹏 P7+车位到车位演示画面
汽车之心:XNGP 系统的能力相比此前 VPA 代客泊车具体强在哪里?
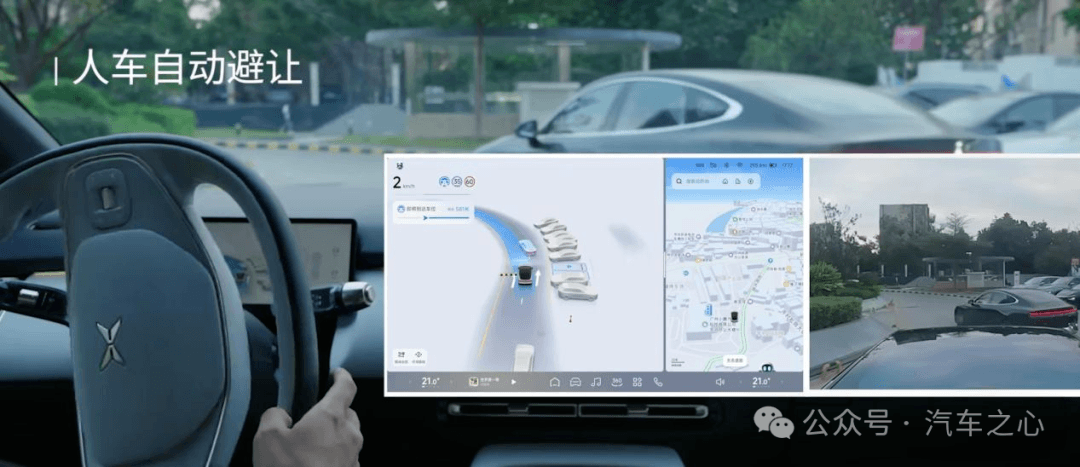
袁婷婷:园区地库场景非常复杂,首先它不像城市道路上有很明确的红绿灯,车道线,栏杆等标识,存在许多非结构化问题,并且会遇到非常多慢速的行人、非机动车等交互场景。
基于端到端大模型,系统不仅可以识别通用障碍物,也会采用拟人化的博弈行为。
过去 VPA 模式只是能开,但存在急刹、突然变道、大转弯等不舒服的情况,甚至经常遇到问题就停下来。
而现在遇到行人走来走去,系统是该缓缓,该停停,和人一样在拥挤的园区开车时,会一直低速行驶,并与行人博弈时留下足够的安全距离,在面对减速带时也会先降速,再过减速带,系统具备老司机开车的稳定与细腻。
小鹏 P7+车位到车位演示画面
汽车之心:那在使用「车位到车位」这个功能之前,是不是要在地库这种非规则路段先跑一遍?
袁婷婷:现在这个阶段,我们有一个非常有趣的模式,叫做通勤模式。
对于用户来讲,在使用「车位到车位」时,基本上都是熟路部分,用户日常从家到公司,从公司到家。
在熟路模式,只要在导航里面设置家和公司,我们就会有一个静默学习的过程,用户全程是无感化的,它不需要有一个学习,保存的动作。
汽车之心:现在这个版本是更支持通勤路线的「车位到车位」?
袁婷婷:我们现在 5.5「车位到车位」先锋版(AI 天玑 5.5.0)里面,当然是有基础能力,只要你在车位到另外一个车位之间,你学习过这条路线,你就可以使用。
在这个基础能力之上,我们还额外打造了一个场景化产品,叫做通勤模式的「车位到车位」。
汽车之心:它这个学习方式是从起点到公司的车位,全程跑一遍,还是只用在地库车位的那一部分封闭路段跑一遍?
袁婷婷:首先我们把两件事情分开,一个叫做基础能力,一个叫做通勤模式。
其实你本质上不会说我在园区内开着,开出去再停下来把这一段路记一下,然后大路开完了以后再记一下,再到终点的时候再把园区内记一下。这是比较不合理,也不符合人性。
所以在基础能力上,它是一段式的,就是全程你只要到终点结束的时候,你把这段路保存下来就好。
而通勤模式就是说只要你从家到公司开过这条路,我们在后台已经通过静默学习保存这条路径了,所以不需要额外记忆。
汽车之心:从一个产品端的视角来看,「车位到车位」强调的是一种怎样的能力?
袁婷婷:第一点,智驾从高精地图时代发展到无图时代,从「全国都能开」发展到「全国都好开」,基本覆盖了导航所能覆盖的公开道路,而导航不能覆盖的园区、内部路等「最后一公里」路段,是我们接下来要重点攻克的,因为这是用户的刚需;
第二点,智驾这个「主线能力」也还没有做到满分,还有持续提升的空间。这件事情只是个起点,我们的「车位到车位」的能力也会持续优化,和 NGP 一样,我们始终还走在一个给用户提供更好的产品体验的路上,它还没有到终点。
汽车之心:所以一个好的「车位到车位」产品它应该是什么样子?
袁婷婷:不拼接、无断点,很拟人或者很丝滑。
汽车之心:您觉得「车位到车位」之后,行业又会讲出一个什么样的新词?
袁婷婷:我预测不了行业接下来会追捧什么,但我感受是,按照小鹏端到端四部曲,小鹏保持了自己的节奏。
今天小鹏做「车位到车位」也不是因为别人在做,这是在规划里面。
但小鹏在国内一直就是智驾的先锋队,何小鹏以前说过一句话特别有意思,他说,第一,小鹏汽车的十年,是中国智驾的十年。第二,小鹏汽车摸着石头过河,然后其他人摸着小鹏过河。
小鹏的确一直在做一些敢为人先的事情,这些都得益于技术上的厚积薄发。
后续按照规划,小鹏在 2025 年底实现百公里接管一次的类 L3 智驾,在 2026 年实现部分场景的 L4 体验,这就意味着,今天这个时间节点就是无人化的前夜,所以我们会在符合法律法规的前提下,在主驾有人的情况下实现一部分无人化,把这一部分的动作、行为、场景都打磨得更好了以后去慢慢实现全无人化。
02、纯视觉 VS 激光雷达,无关优劣
汽车之心:小鹏现在也推出了 AI 鹰眼智驾方案,您认为真正的纯视觉路线应该怎样定义?
袁婷婷:小鹏现在采用轻地图、轻雷达方案,能在国内率先去掉激光雷达,里面包含两点思路:
第一,人开车时通过眼睛看,本质上没有激光雷达,而小鹏的摄像头可以做到比人眼看得更清楚,看得更广;
第二,规则时代做了很多数据标注、筛选工作,中间有大量信息损失,但是大脑不会有信息损失,所见即所得。而在端到端一段式模型中,我们云端模型有 2000 万 Clips 的小视频来训练系统,让其可以信息无损地输出结果。
小鹏通过硬件与算法能力提升,已经有能力把激光雷达去掉,当然两条路线各有好处,大家也不用纠结谁更好,只是小鹏今天先做到了而已。
汽车之心:小鹏未来是继续保持轻雷达路线,还是也会像特斯拉一样把雷达都去掉?
袁婷婷:和我刚才回答的一样,以终为始来看,最后是不是能用人的眼睛来解决一切。在这个过程中的硬件发展,以及端到端一段式能力的提升,这件事情会帮助我们不断往这个方向走。
10 年前小鹏开始做智驾的时候采用了激光雷达方案,那时并不是说 10 年后的某个时间点,必须拿掉激光雷达,只是我们知道它逐步走向了一个成功,发现它能力所及了。
所以我们还是充满期待的,我们还在 Scaling law 的左下角,还有很长的路要走。(Scaling law:规模法则,指模型性能会随着数据集规模、模型参数量和计算能力的增加而不断提升)
汽车之心:所以纯视觉路线跟激光雷达路线没有绝对的优劣,只是说选择问题?
袁婷婷:我觉得是的,从高速智驾,到自动泊车,再到城区智驾,这个过程中激光雷达发挥了重要作用,我并不想比较,每一家的选择都会有自己的道理。
只是今天小鹏有能力做到了,并且我们还做得很好,因为用户体验是最好的买单结果,P7+的智驾能力跟其他车型 Ma 的能力其实是一致的。
这就证明去不去激光雷达,都能给用户带来非常好的智驾体验,这件事情才是最重要的。
汽车之心:小鹏之后是两条路线一起走吗?还是会慢慢偏向纯视觉路线?
袁婷婷:小鹏在 P7+上已经实现了轻雷达、轻地图的标配,后面会延续 P7+的战略。
但我们也会保障 Max 车主的体验,因为小鹏就是一套软件、一套模型的能力平台化地赋能到所有车主上,所以在后续车辆以及版本能力提升过程中,过往的老车主也会持续体验到小鹏优秀的产品能力,这两部分的能力会持续拉齐。
03、智驾标配,小鹏的阳谋
汽车之心:从产品思维出发,小鹏 P7+为何采用了智驾标配的策略?
袁婷婷:第一,得益于小鹏选择了全栈自研路线,我们很早就意识到小鹏一定会有非常多的车型,这是一个很大挑战,因为在不同的车上,每款车传感器放置的方式、位置都不太一样。但小鹏肯定是用平台化的方式来做,否则不可能赋能到全系车型上。
第二,小鹏推出了国内首个真正意义上的一段式端到端,包括了模型的一段式、场景的一段式和车型的一段式。
模型一段式指彻底的端到端,它能够在复杂的各种场景里面实现类人驾驶;
场景的一段式指辅助驾驶的终局,使用端到端的能力覆盖所有的场景。小鹏率先将端到端赋能到园区场景,未来可以赋能到更多产品线和场景上;
车型的一段式,即不分车型,也不分是否有激光雷达,都可以用一套的端到端软件来做覆盖。
汽车之心:对于车企而言,把智驾都做成标配,也符合当下的「智驾平权」?
袁婷婷:今天智驾安全基本上是人驾下的 10 倍,并且智驾可以提升通行效率,提升道路的通畅性。
对于车主来讲,智驾让车从交通工具变成了科技场景,车会成为你的第二个家,你的生活方式整体上都会被改变。
我们不希望这种特别厉害、特别好的技术只给一些非常豪华的车,我们希望给更多的用户能用上,这件事情是非常有价值,也是驱动整个自动驾驶中心同学们日夜不间断往这个方向努力的重要原因。
汽车之心:这个战略会对车企毛利方面带来一定压力吗?
袁婷婷:我觉得 P7+卖爆可以代表一些结果性。P7+车主选择这台车的核心原因就是智驾能力,我们都非常惊喜,这一天居然到来得这么快,我们十年前觉得智驾可能在购买因素 TOP10 内已经很不错了。
但是现在的用户的心智,已经发生了根本性转变。
汽车之心:您 2024 年加入小鹏,对于整个团队的感受如何?
袁婷婷:首先团队氛围简单,大家沟通都特别直接,任何一个新成员入局新团队都会面临新旧融合问题。但我感觉和这个团队本身就具备一致性,好像找到了同路人。
其次小鹏团队具备非常强的信念感,大家特别笃定地相信自动驾驶,相信 AI。
自动驾驶十年大浪淘沙,有很多人已经离开这个行业,大家都认为这事是不是做不出来了?但是我看到这个团队非常坚定。
最后,对于技术团队来讲一件非常难的事,它本质上在面向用户来做产品。今天小鹏的技术同学非常谦逊,他们保证智驾全球第一梯队的同时,也非常在乎用户体验,我们认为最好的军功章在用户身上,这是小鹏自动驾驶中心的明确目标。
来源:第一电动网
作者:汽车之心
本文地址:https://www.d1ev.com/kol/260330
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!












 京公网安备
11010502033163号
京公网安备
11010502033163号