前两天体验了岚图的记忆泊车和遥控泊车功能,抽空把体验高速领航功能的感受整理了一下,和大家分享。
首先,Apollo 高速领航功能必须在已经设置目的地的行程中才能使用,这是开启该功能的前提。导航好路线,出发。
上了环线就打开高速领航功能。开启之后,仪表屏右侧显示蓝色方向盘,并有“A”字样角标,旁边是车机自动识别的道路限速,一直顶着限速开,距离收费站1公里左右,车机提示“即将需要接管车辆”,进收费站之前会提示“领航驾驶辅助已退出,请接管车辆”。
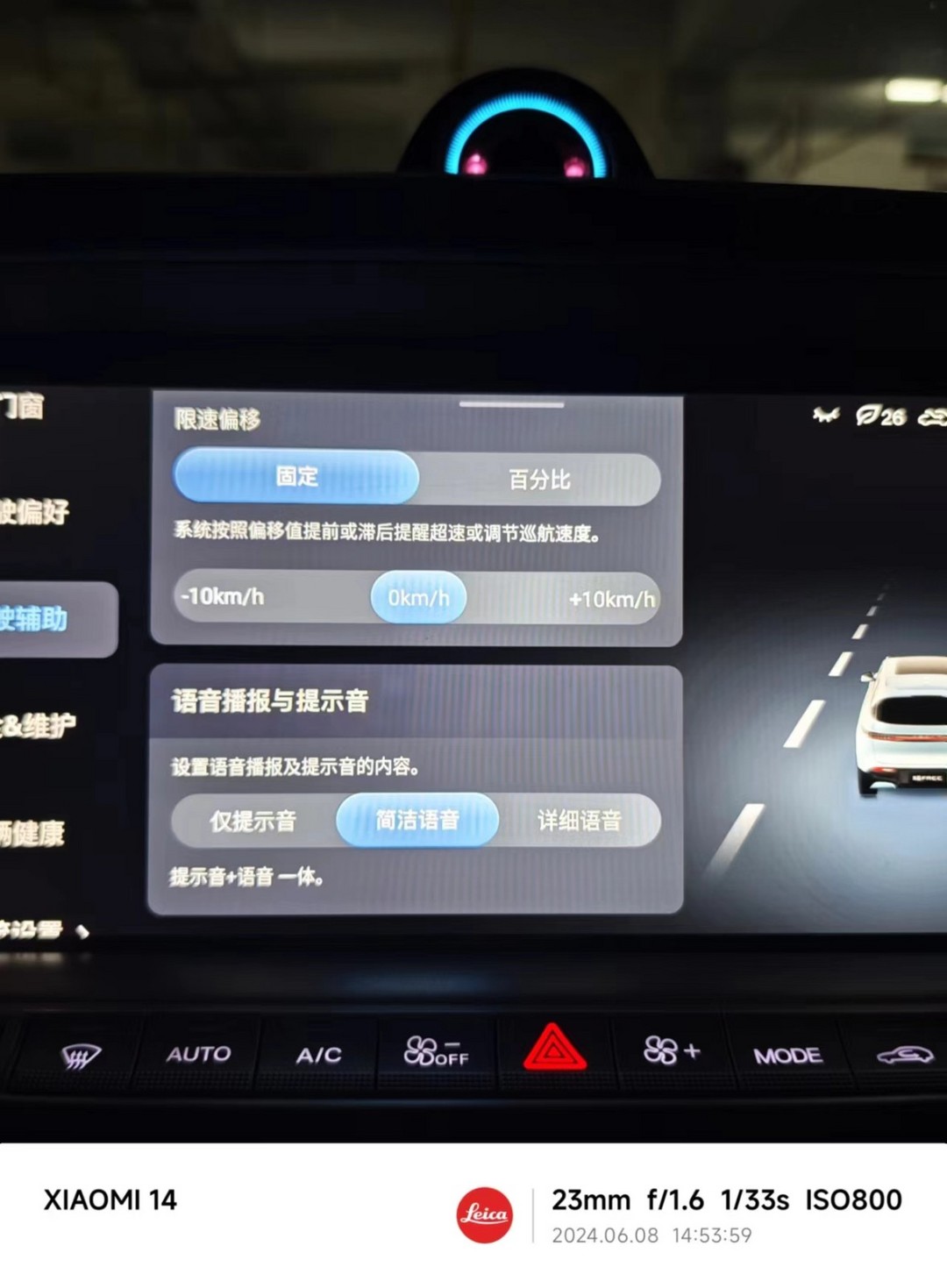
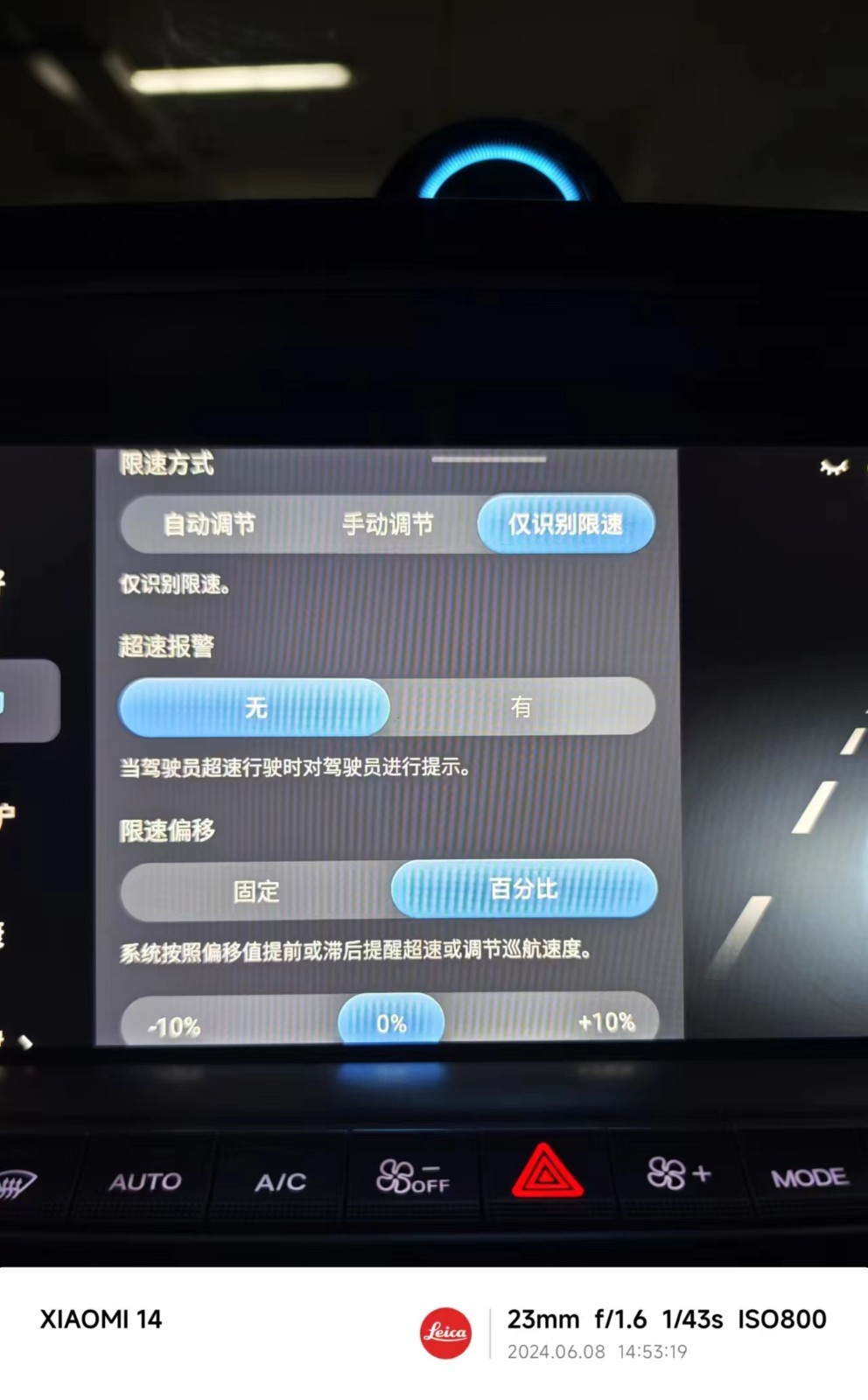
上了高速之后继续开启领航。Apollo智驾系统提供了三种限速方式,“自动调节、手动调节、仅识别限速”三种,同时还配备了超速报警、限速偏移功能。
限速偏移是以车机识别的限速为基础,在一定范围内控制车辆行驶速度,系统提供了百分比(±10%)和固定值(±10 公里)两种调整方式,自由度还是挺合适的,毕竟安全第一。
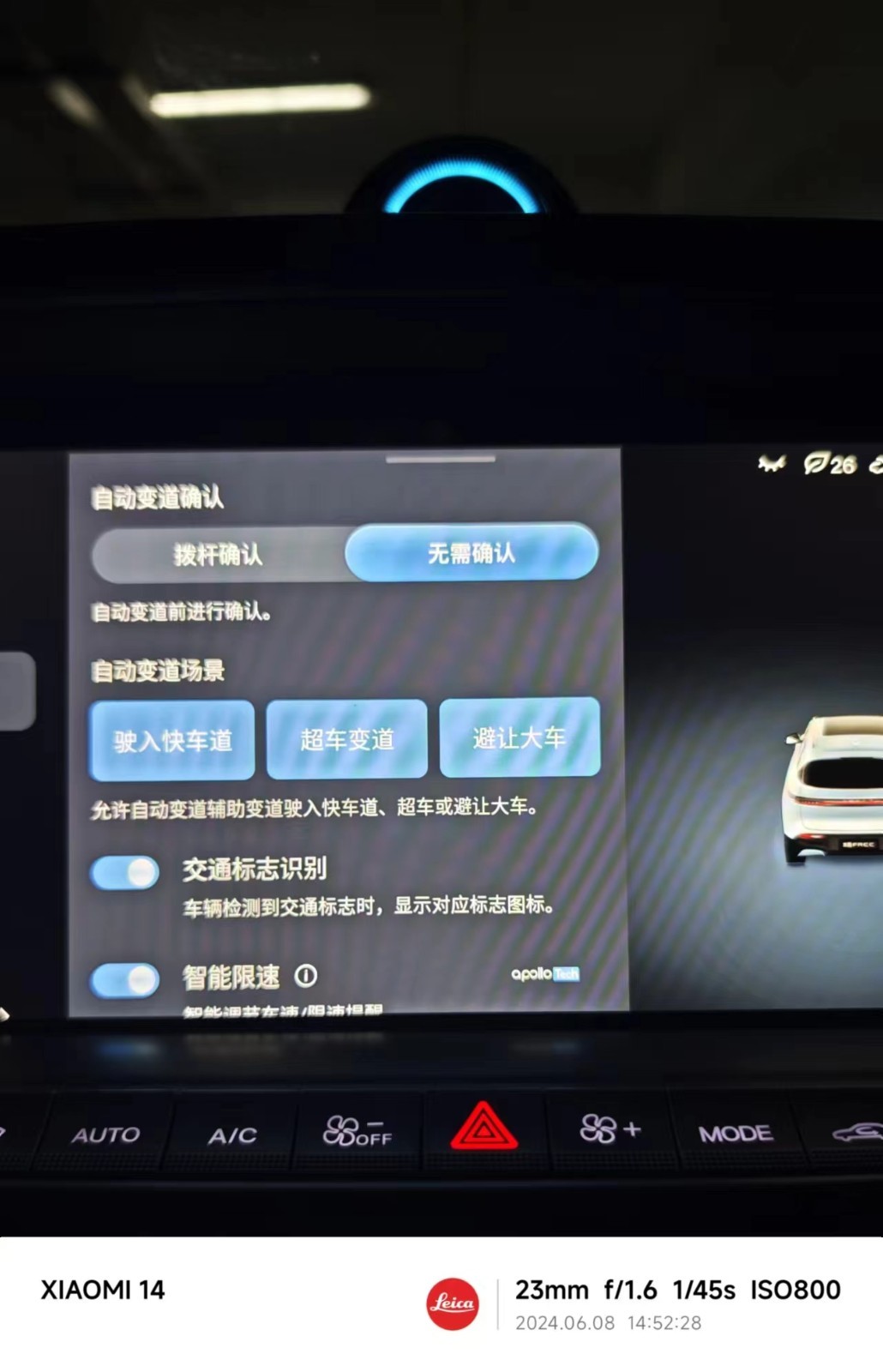
领航功能开启之后,还可以通过方向盘左侧按键调节车度和跟车距离,方便驾驶员根据路况调整车辆行驶状态。等高速上车少了一些之后,顺便试了试自动变道功能。Apollo智驾系统提供了三种常见的变道场景,可以按驾驶习惯选择,三个场景我都选了😁。另外还选了变道“无需确认”,车机在确认安全之后会自主变道,感觉没有人为干预,变道更丝滑。
简单说一下变道场景,驶入快车道场景开启后,车机在条件允许时默认走快车道,中间我试着打右转灯变道至慢车道。
变道完成后车机提示关闭转向灯,这样可以避免车机误执行变道操作。
在慢车道行驶较短时间后,车机准备自主变道,在确认安全之后,自动变至快车道。
避让大车场景下,车机在识别出车辆附近有大车时,会自主超车远离,妥妥的老司机操作,安全意识满分。
一路体验下来发现,Apollo高速领航驾驶辅助功能很大程度上依赖着车机导航,因为车机需要根据导航信息来调整车辆行驶状态,这个时候百度高精导航的作用就显得尤其重要了。而且可以看出,整体领航功能设置逻辑是以行车安全为最高优先级的,比如远离大车场景,避免出现大车影响驾驶员视线导致的安全隐患。比如变道时车机默认必须预留足够的安全距离才会执行变道操作,杜绝了“纸片超车”的驾驶陋习。以及上下匝道时,车机会根据导航提示,提前1公里左右进入慢车道,并且循序渐进完成减速操作,直至达到匝道限速,为安全进入匝道做好准备。以上这些都体现了Apollo智能辅助驾驶系统良好的车辆操作逻辑和充足的行车安全储备。
PS:下了高速之后在县道上行驶,我试着打开领航辅助,发现也是能用的,这就意味着只要有高精地图,领航驾驶辅助功能都可以使用。
来源:第一电动网
作者:电动车主de97e360
本文地址:https://www.d1ev.com/kol/235072
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!






 京公网安备
11010502033163号
京公网安备
11010502033163号