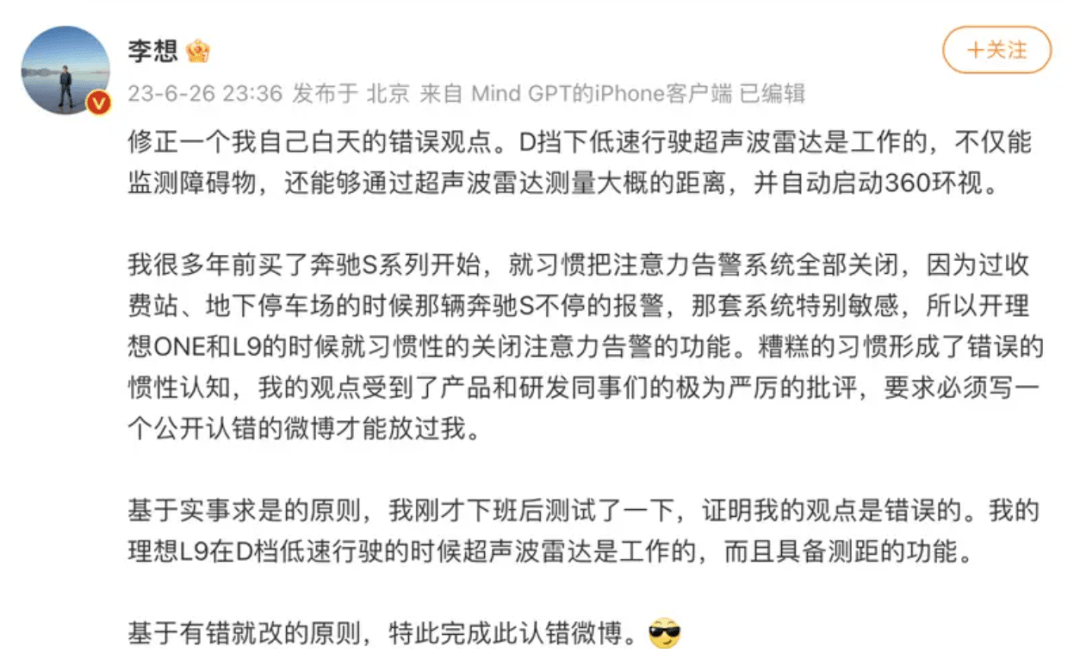
近日,李想的一篇博文在某平台炸开锅了。
D档低速行驶下理想的雷达不工作?本来是理想车主对于雷达报警功能的不满,却逐渐演变成某平台“用户”对于车主的“网暴”,最终以李厂长道歉落下帷幕。
图片来源于网络
怎么看这个事?
当我们踏进4S店的时候,销售会五花八门地介绍智能辅助驾驶系统。辅助驾驶技术简单来说是由“感知、决策、执行”三方面组成的。如果把车类比人,那么感知就像人的眼睛,决策则是大脑,执行则是我们的脊柱。那么当我们开启智能驾驶时,车中什么硬件充当眼睛的角色?
答案就是雷达。

小编在理想官网找到L7 MAX的雷达图示例
L7展示的激光雷达、毫米波雷达、超声波传感器又是什么?今天我们不说晦涩难懂的原理,只用最通俗易懂的语言来揭秘关于雷达,关于智能驾驶那些事。
前向毫米波雷达是个啥玩意?
李厂长曾说:“摄像头 + 毫米波雷达的组合像青蛙的眼睛,对于动态物体判断还好,对于非标准的静态物体几乎无能。”摄像头日常生活我们天天接触,不过多介绍,我们来聊聊毫米波雷达。
毫米波雷达发射毫米波,本质是电磁波。毫米波雷达探测距离一般是在150m~250m之间。毫米波雷达最大优势是对车辆速度的识别,因此常安装于车辆前视区域。毫米波雷达穿透力强,所以即使在雨、雪、大雾等极端恶劣天气下依旧能发现前方车辆。若是在路上突发恶劣天气,可打开辅助驾驶系统,帮助我们探测肉眼无法看到的前方,提高行车安全。
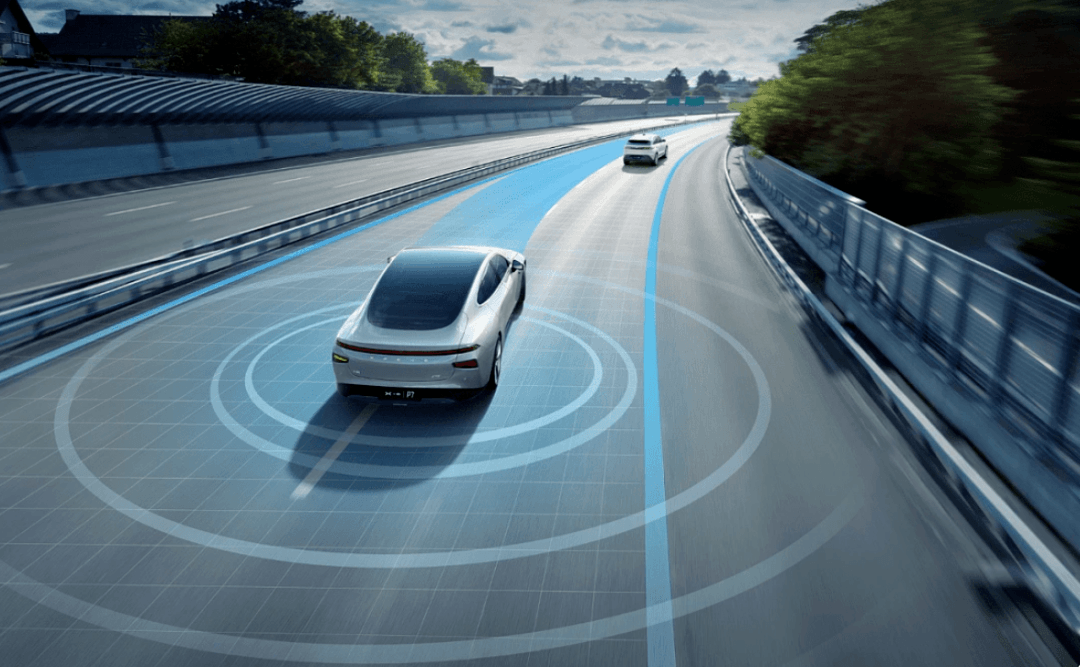
图片来源于小鹏NGP
说完毫米波雷达的优点,我们来说说他的缺点。毫米波雷达对运动的物体很敏感,但对静止物体比较容易“忽视”。
毫米波雷达能够测量与前方物体的距离,但探测不到物体高度,信息密度低,毫米波雷达若对其过于信任,则会造成辅助驾驶“草木皆兵”。
为降低误触发率,如今毫米波雷达通常会在高速上设置为自动过滤静止目标。因此,毫米波雷达即使发现了前方的静止物体,宁可不识别,也不能经常误刹车。
超声波传感器好像听过?
超声波雷达的测量精度在1~3cm,短距离测量中,超声波测距则具有巨大优势。
我们常用的自动泊车以及近距离监测障碍物都是超声波雷达。很多车型会配置12个超声波雷达,8个安装于汽车前后的,UPA超声波雷达(精度高、测距短),和4个安装于汽车两侧的,APA(自动泊车)超声波雷达(精度一般、测距长)。
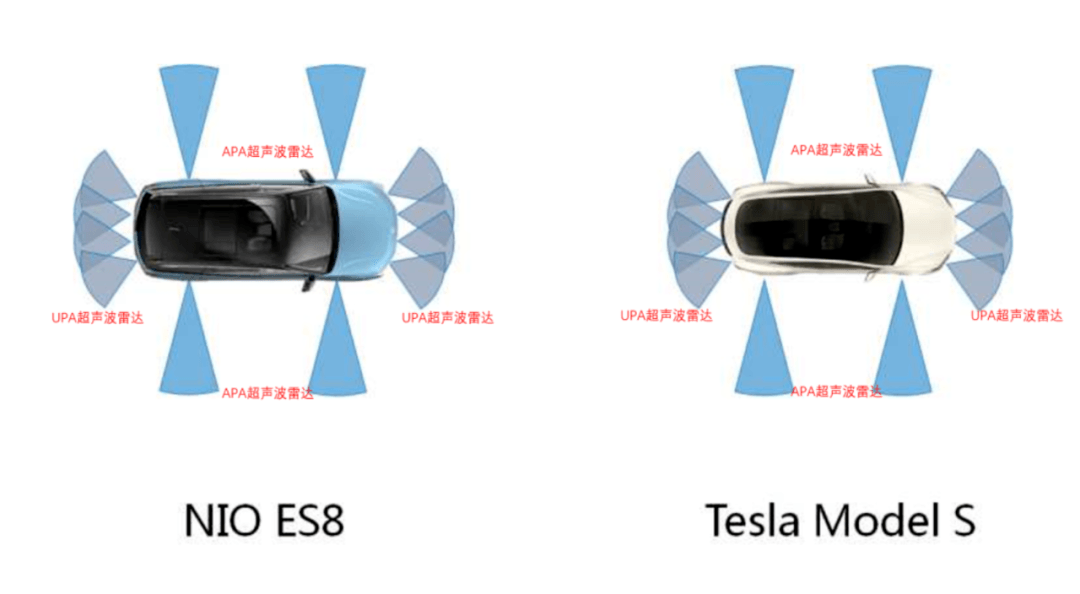
图片来源于网络
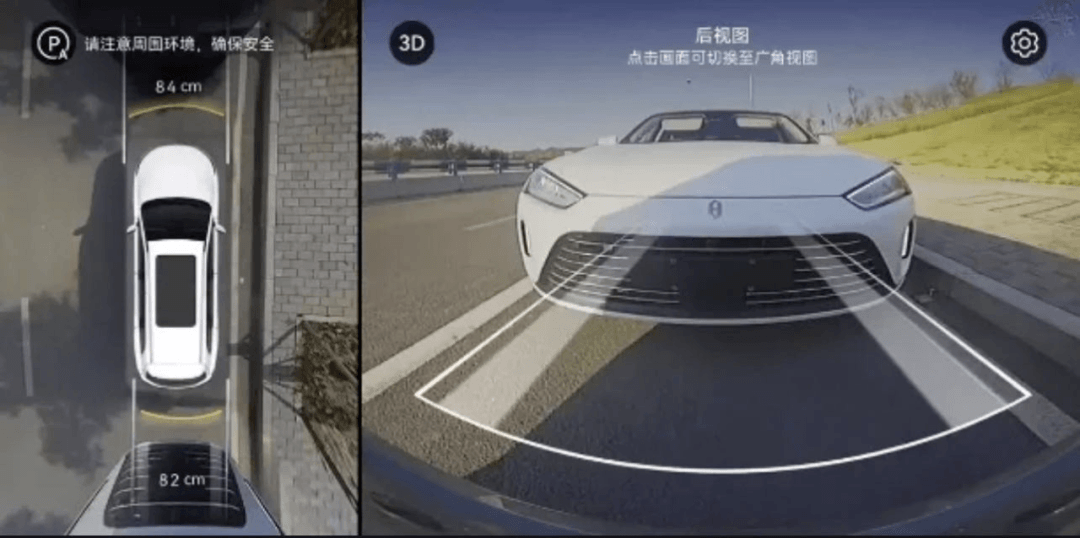
图片来源于问界自动泊车
当车辆低速向前或是挂入倒档后,超声波雷达会识别障碍物的方位和距离,会通过雷达图显示在中控屏中,同时会伴有报警音提示。雷达监测一般为平视监测,属于雷达监测特性,过近过低的障碍物则是雷达盲区。
小编想说,雷达提示是辅助功能,存在近车盲区和报警延迟,不可过度依赖,开车前绕车身一圈很有必要。
前雷达可以在中控屏中设置报警音的开关,当前超声波雷达中任意一个损坏,则超声波雷达均停止工作,后方同理。
随着配备驾驶辅助系统车型市场占比逐渐增长,各大厂家铺天盖地宣传自己的智能驾驶系统多么智能,却很少有厂家站出来说明智能驾驶目前存在的弊端。
小编想说,目前智能驾驶仍处于辅助驾驶阶段,“行车不规范,亲人两行泪”,安全驾驶仍不可掉以轻心。不过小编也相信,随着技术发展、算法、数据的积累,未来某一天我们一定会实现完全的自动驾驶。
最后
回顾整个事件,小编觉得最让人不解的是当车主提出存在的问题时,得到的不是企业方的官方解答,而是企业家微博转发怼车主,然后大V、网友与其他用户等跟着网暴……好在,李厂长最后认识到错误,删除博文,并敢于认错。
对于这样的李厂长,这样的理想汽车营销方式,你们怎么看?
来源:第一电动网
作者:电动势
本文地址:https://www.d1ev.com/kol/205762
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!








 京公网安备
11010502033163号
京公网安备
11010502033163号