在使用智能驾驶的时候,你肯定关心这套系统的安全性吧?算法搭载到实车之前,是怎样测试验证的呢?
几个月前,我们做过一期游戏引擎进入智能汽车产业的视频。前些天,我们又和一家做虚拟世界的公司交流了一个有意思的话题——智能驾驶仿真。
智能驾驶系统正式量产上车前,仿真系统就是测试、验证的第一个考场。
驾驶仿真究竟是啥?
欢迎来到智车星球,今天,我们就来聊一聊推动智能驾驶技术不断迭代的背后功臣——智能驾驶仿真。
在说仿真前,我们先说说另一个概念——数字孪生。
它是什么意思,维基百科的解释倒也不晦涩,更简单粗暴些去理解,数字孪生就是在一个设备或系统的基础上,创造一个数字版的“克隆体”。

比如经典游戏《塞尔达传说》,就可以看作是一个数字孪生世界。
关于数字孪生的起源有很多版本,在可以查到的资料中,美国空军研究实验室和美国宇航局都是数字孪生概念提出者。空军实验室希望解决老旧飞机的健康诊断与预测问题,降低飞机运维成本、提高利用率。宇航局则希望解决太空探测运载工具的健康诊断与预测问题。
领域不同,但有两个很关键的相同点——
1、对于数字孪生的提出是问题驱动,而不是技术驱动的。
2、目的都是为了大幅有效地降低成本。
这点很好理解,毕竟,要验证一款新设计的火箭能否顺利升空,不能先制造出好几个反复发射验证,那样不仅研发周期过长,成本还会高到离谱,就算是敢放大烟花的马斯克也不敢这么随便造。
回过头来看智能驾驶,不光有验证成本的问题,还有人身安全的问题,必须尽量确保自身安全,且不会对道路上的其他人造成伤害,因此,在一个虚拟的验证环境先验证,就非常重要。
那么,实现数字孪生,都需要哪些核心技术?
首先是建模、渲染,将三维模型处理得更加贴近现实生活,呈现出与实物类似的质感,然后就是仿真,是的,终于要讲到这个视频的主角了,它其实是实现数字孪生的核心技术之一。
如果说数字孪生是《塞尔达传说》构建的虚拟世界,仿真就是玩家在游戏中进行的各种探险活动。玩家可以选择不同的路径、采取不同的策略,与游戏世界中的角色互动,完成各种任务和挑战。仿真过程模拟了真实世界中的行为和情景,玩家可以通过在游戏中的实验、观察、决策来获得游戏世界的成功。

具体到智能驾驶仿真,是建立车辆模型,同时将车辆行驶场景进行数字化还原,建立尽可能接近真实世界的系统模型,这样通过软件仿真就可对智能驾驶系统和算法进行测试。
仿真流程大概是这样,搭载初始版本算法的智能驾驶车辆在仿真系统行驶,系统会模拟各种道路工况,当算法响应不符合预期时,系统会将当时的日志进行保存,研发人员会针对这些问题予以分析解决,并在仿真的支持下复现验证,从而进行算法的迭代,提升可靠性。
那么仿真究竟要仿什么?要构造怎样的输入?
首先是还原与真实世界一致的交通静态元素,比如道路、交通标志、护栏、树木、建筑等等。当前,大多数智能驾驶仿真软件或平台都采用使用三维建模软件创建“素材库”,利用高精地图的矢量化图形对道路要素进行重建,然后再利用专业软件添加建筑、树木、地形等其他静态要素。
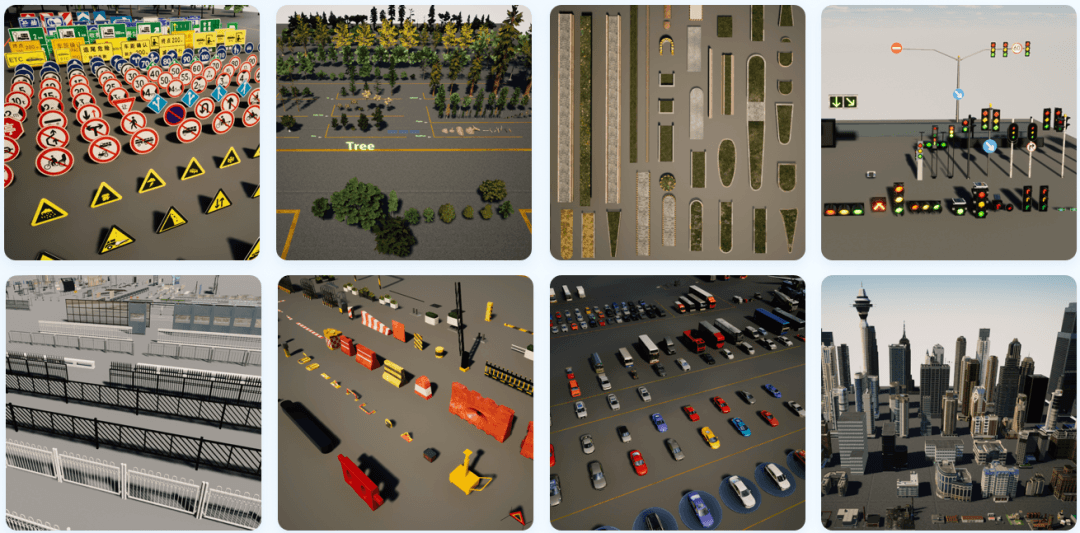
△图片来自51Sim
有了静态环境,还要有动态场景。
动态场景的生成包括两方面:一是微观的行人、车辆、天气;二是宏观的交通流场景构建。
如何自动化生成合乎现实逻辑的交通参与者,是一个难点。
同时,天气变化、光照变化等动态要素,需要严格遵循现实世界的物理规律,在这里,游戏引擎就能发挥重要的作用,其在场景渲染、物理引擎等真实场景模拟的能力上,比传统仿真软件强大许多。
△图片来自51Sim
因此,很多最新的智能驾驶仿真平台,均是基于游戏引擎开发,比如微软AirSim、腾讯TAD Sim,51sim等,都是基于Unreal引擎开发。对游戏引擎感兴趣的朋友,请点击:当游戏引擎“卷”进电动车,奇妙的事发生了 | 智车星球,视频链接我们也放到文章结尾了,欢迎收看。
说完了静态和动态环境模块,我们再来看看传感器模块。
传感器作为智能驾驶车辆的“眼睛”,用于感知外部环境、发现并分类障碍物、预测速度,协助精确定位车辆周围的环境等。
从仿真角度看,无论哪种传感器,理论上都可以从以下三个不同的层级仿真:对物理信号进行仿真、对原始信号进行仿真以及对传感器目标进行仿真。
摄像头直接仿真摄像头检测到的光学信号,雷达直接仿真声波和电磁波信号就是物理信号仿真,原始信号仿真是把传感器探测单元拆掉,因为在控制电控嵌入式系统中有专门的数字处理芯片,可以直接仿真数字处理芯片的输入单元。传感器目标仿真,即传感器感知和决策如果是分为两个不同层级的芯片来做,那么可以将传感器检测的理想目标直接仿真到决策层算法输入端。一般来说,通过软件仿真的方式达到目标级仿真,提供真值是比较容易做到的,而原始信号,尤其是物理信号的仿真,则需要使用大量的仿真设备,相对比较复杂。
在车辆仿真中发展最早也最完善的部分,就是动力学模块。在智能驾驶仿真过程中,需要借助车辆的动力学模型,来对决策、控制算法进行客观的评估。
传统的商业仿真软件在这个领域已经非常成熟,一般将实际测试车辆的车体模型、轮胎模型、制动系统模型、传动系统模型等都参数化,根据车辆的动力学模块配置合适参数,从而模拟测算车辆在智能驾驶系统操控下的能力和极限。
除了以上提到的智能驾驶仿真主要模块外,还有高精地图、仿真接口等模块,每个模块都有一些需要解决的关键仿真问题。
总的来说,如何让模拟数据具有现实世界的真实性和丰富性是最大的挑战,目前,智能驾驶仿真对真实测试的可替代性仍然面临一些质疑,相信随着体系标准的完善、技术的迭代,仿真会为智能驾驶推进带来更大的助力。
后续我们还将推出相关内容聊一聊智能驾驶仿真的标准建立、代表企业等,如果你有其他感兴趣的点,欢迎留言告诉我们。
来源:第一电动网
作者:智车星球
本文地址:https://www.d1ev.com/kol/204737
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!








 京公网安备
11010502033163号
京公网安备
11010502033163号