盖世汽车讯 据外媒报道,华南理工大学与清华大学研究人员开发出增强型激光雷达-惯性测量单元(LiDAR-IMU)SLAM框架,旨在提高自主模块化公交车停靠过程中的定位精度和鲁棒性。这一改进有助于提升自主模块化公交车系统的可靠性,从而支持更安全、更顺畅、更节能的下一代公共交通。
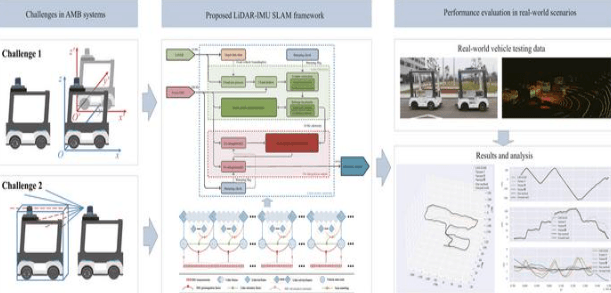
图片来源:《Green Energy and Intelligent Transportation》
来源:第一电动网
作者:盖世汽车
本文地址:https://www.d1ev.com/news/shichang/295949
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号