盖世汽车讯 据外媒报道,韩国科学技术院(KAIST)的研究团队开发了一种四足机器人技术,该技术不仅能够在没有视觉信息的情况下通过估计地形行走,还能让机器人通过摄像头和激光雷达传感器感知周围环境,并在行走过程中自主做出决策,就像动物通过视觉感知地形并调整步态一样。这项技术有望推广到各种机器人平台,例如轮式机器人和类人机器人。
该研究团队由电气工程学院(School of Electrical Engineering)的Hyun Myung教授领导,与初创公司EuRoboTics Co., Ltd.合作,开发出名为“DreamWaQ++”的四足机器人控制技术。该技术能够基于视觉信息识别地形,并实时调整运动策略。
相关研究成果发表于期刊《IEEE Transactions on Robotics》。
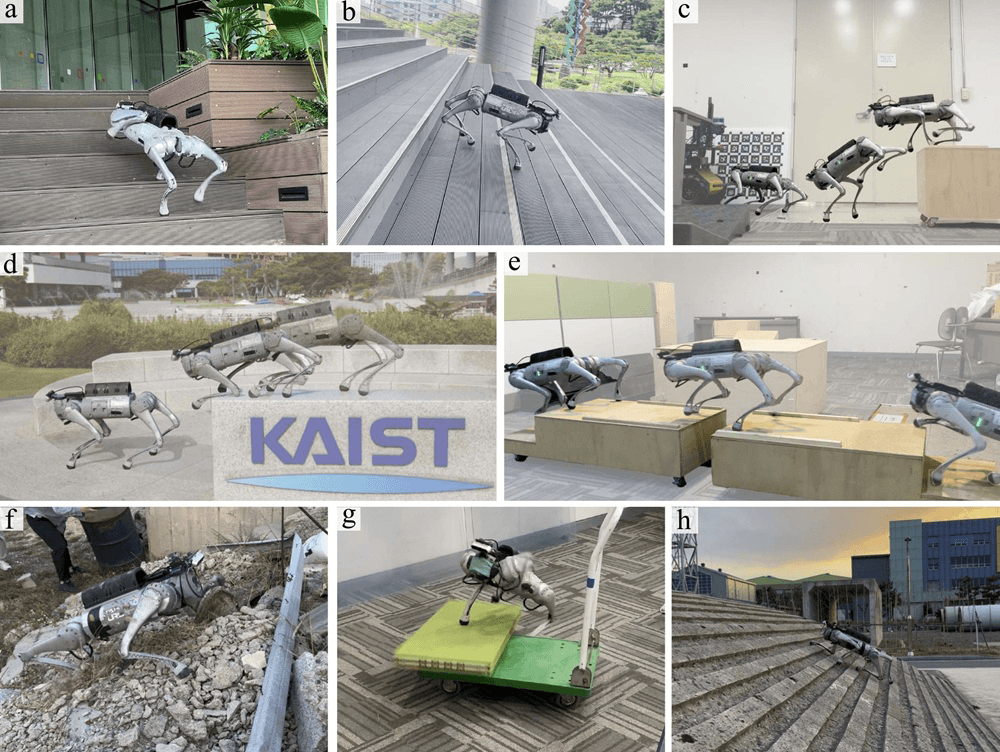
图片来源:KAIST
从盲行到视觉控制
来源:第一电动网
作者:盖世汽车
本文地址:https://www.d1ev.com/news/shichang/295639
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号