盖世汽车讯 据外媒报道,在车辆导航方面,南京航空航天大学的研究人员与来自香港和英国的合作伙伴开发出先进的系统,集成了全球导航卫星系统(GNSS)、惯性测量单元(IMU)和光检测和测距(LiDAR)里程计(LO)。这种新颖的方法解决了城市导航中的关键挑战,大大提高了定位精度和可靠性,特别是在导航系统通常不稳定的密集建筑环境中。
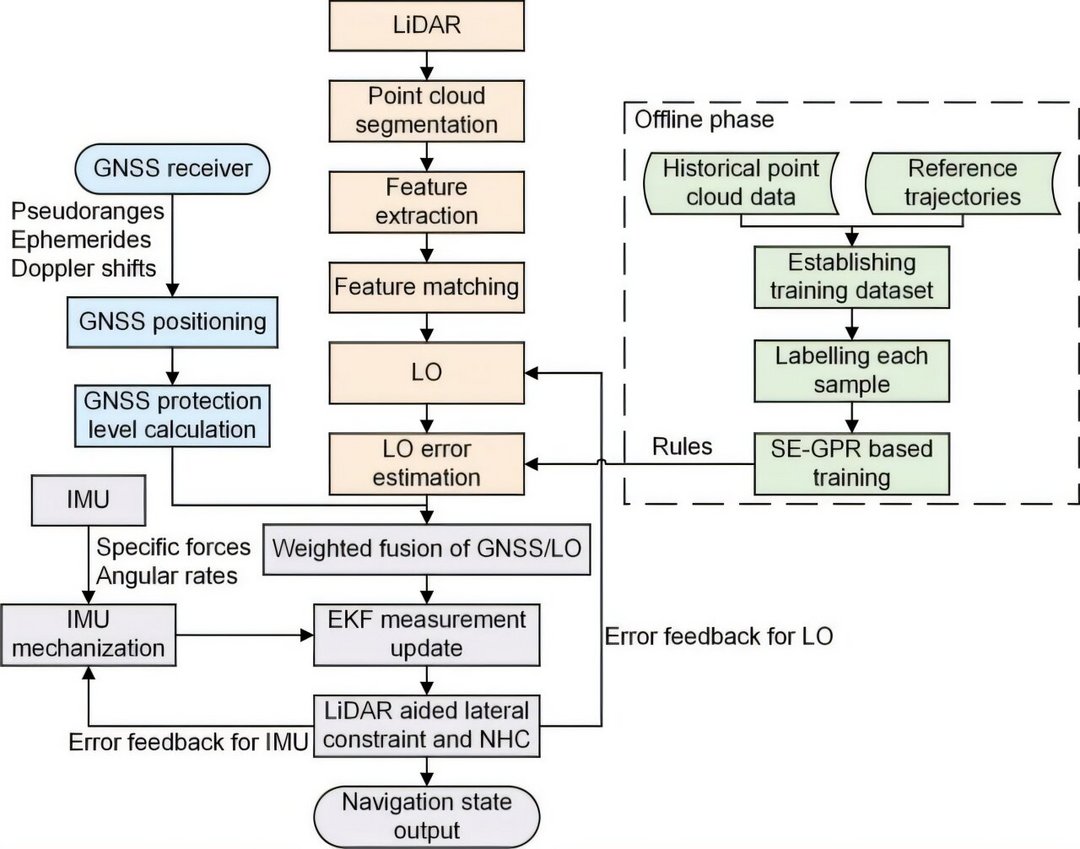
图片来源:期刊《Satellite Navigation》
精确定位是智能交通系统(Intelligent Transportation Systems,ITS)发展的基础。然而,在城市地区,全球导航卫星系统(GNSS)和惯性测量单元(IMU)的性能经常受到周围基础设施信号受阻或失真的影响。这些限制凸显了对更强大的误差建模和传感器集成的迫切需求。克服这些挑战对于开发下一代ITS解决方案至关重要。
来源:第一电动网
作者:盖世汽车
本文地址:https://www.d1ev.com/news/shichang/251229
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号