盖世汽车讯 近年来,世界各地的机器人专家设计了各种各样的机器人夹持器,可以拿起和操纵不同类型的物体。在处理现实世界的手动任务,特别是复杂的物体操纵任务时,最有效的夹持器通常是受到人手启发的。尽管通常表现良好,但很多类人机械手依赖于先进的(有时很昂贵)的机制,以及复杂的编程工具。这可能会限制它们的大规模部署,因为不利于开发节能和成本效益高的机器人。
(图片来源:arxiv.org)
据外媒报道,最近,普渡大学(Purdue University)和麻省理工学院(MIT)的研究人员开发了一种更简单但似乎同样有效的机器人夹持器。在arXiv预印本服务器上发表的一篇论文中提到,该夹持器被发现可以有效地处理复杂的物体操纵任务,尽管其自由度(DOF)比受人手启发的夹持器要小。
该论文合著者Yu She表示:“传统的高DOF灵巧机械手可以执行复杂的手持操纵任务,但由于其复杂的机制,这对于编程/控制来说并不简单。相比之下,传统的单DOF平行钳口机器人夹持器易于编程/控制,但仅限于抓取任务,并且执行手持操纵具有挑战性。我们的团队旨在设计一种夹持器,可以弥合这两种夹持器之间的间隙。”
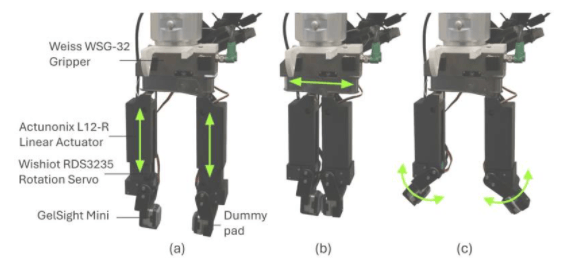
此项研究开发的新夹持器具有五个DOF。虽然其设计简单且更易于通过编程工具进行控制,但依靠集成的视觉基触觉传感器记录的感知数据,该夹持器仍然可以执行类似人类的手持操作。
新设计的夹持器基本上由两个连接在夹持器基座上的手指组成。值得一提的是,该团队还在夹持器的左手指顶部安装了一个小型的视觉基触觉传感器。Yu She表示:“夹持器基座为夹持器的关闭和打开提供了一个DOF。每个手指都配备了一个线性执行器和一个旋转伺服电机,总共为夹持器提供了五个DOF。夹持器的手指是通过3D打印由PLA材料制成的。一个GelSight微型视觉基触觉传感器安装在左指尖,以提供关于被抓取物体的几何形状、方向和夹持力信息。”
该夹持器的特点是,虽然其动作很容易控制,但是通过结合五个自由度,它仍然可以在手持操纵任务中实现高水平的灵活性。
研究人员通过一系列最初的现实世界实验来评估该夹持器,并发现它超出了大多数具有几个自由度的简单夹持器的基本操作技能。该夹持器可以有效地完成两种类型的物体操纵任务,即分离(singulation)和挖出(scooping),例如它可以模仿人类擦去卡在物体表面和手指之间的沙粒的动作,这是人类在海滩上捡起贝壳时可能会做的动作。
来源:第一电动网
作者:盖世汽车
本文地址:https://www.d1ev.com/news/shichang/242342
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号