盖世汽车讯 要在广泛的现实世界动态环境中部署,机器人必须具备成功完成各种手动任务的能力,从家务到复杂的制造或农业过程等。这些手动任务需要抓取、操纵和放置不同类型的物体,这些物体的形状、重量、属性和纹理可能会各不相同。
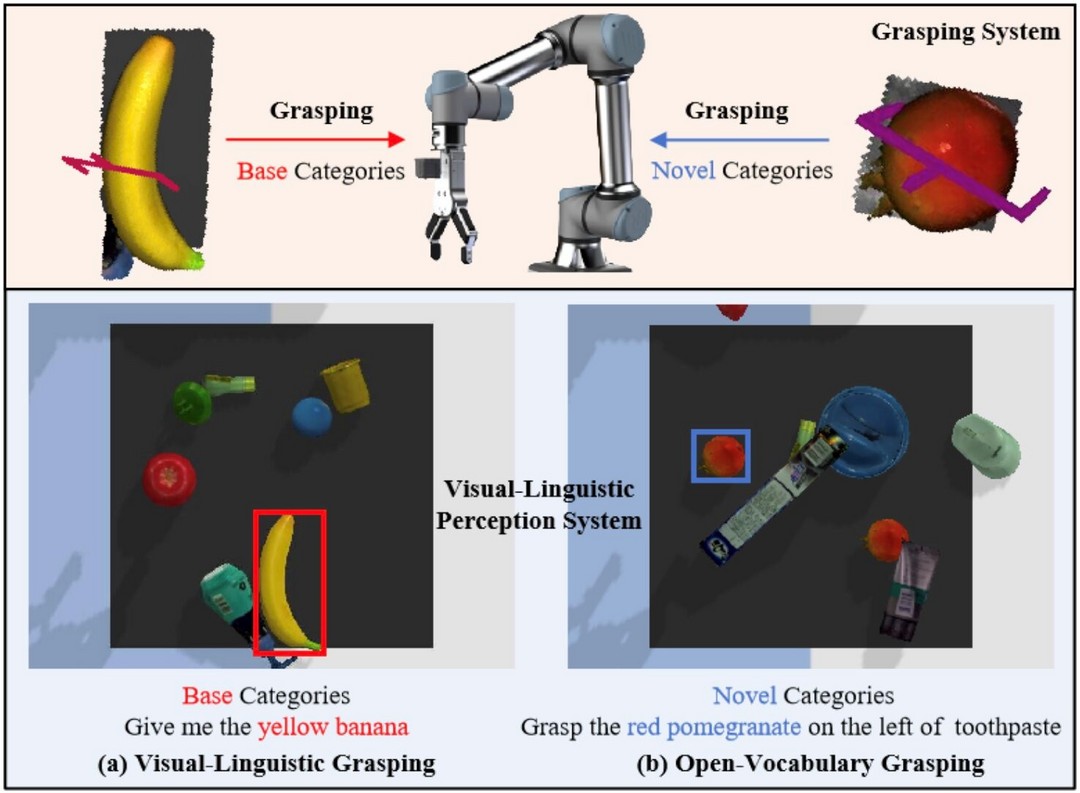
图片来源:arXiv
然而,目前大多数使机器人能够抓取和操纵物体的方法,只能使机器人与训练中遇到的物体匹配或非常相似的物体进行交互。这意味着,当机器人遇到一种新的(即以前从而见过的)物体时则无法进行抓取。
来源:第一电动网
作者:盖世汽车
本文地址:https://www.d1ev.com/news/shichang/240459
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号