盖世汽车讯 随着人工智能的快速发展,自动驾驶、具身智能等无人系统不断在现实场景中得到推广和应用。作为获取信息的核心手段,视觉感知在这些智能系统中发挥着十分重要的作用。然而,如何在动态、多样化和不可预测的环境中实现高效、精准和稳健的视觉感知,仍是有待解决的难题。
(图片来源:清华大学)
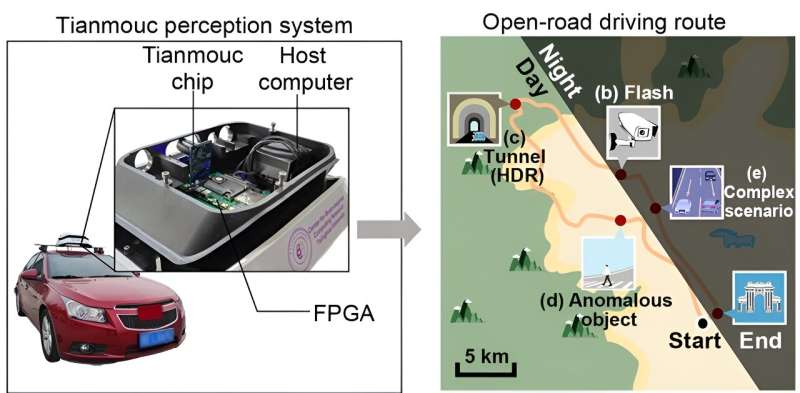
在开放世界场景中,智能系统不仅要处理大量数据,还要应对各种极端事件,如突发危险、隧道入口处剧烈的灯光变化,以及夜间驾驶场景中强烈的闪光干扰等。传统的视觉感知芯片受到“功耗墙”和“带宽墙”的限制,在处理这些场景时经常面临失真、故障或高延迟的问题,严重影响了系统的稳定性和安全性。
来源:第一电动网
作者:盖世汽车
本文地址:https://www.d1ev.com/news/shichang/233568
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号