盖世汽车讯 创新的全球导航卫星系统(GNSS)定位技术利用大量车辆生成的数据来创建高分辨率大气延迟校正地图,从而显著提高全球定位系统(GPS)在不同空间尺度上的精度。这种新方法利用实时、众包的车辆GNSS原始数据,改进了传统的GPS应用,并提供了一种经济高效的精确定位解决方案。
受当前大气校正模型的局限性影响,GNSS精度提高始终受阻,因为这些大气校正模型依赖于稀疏、高成本的基础设施。这些传统模型难以提供精确定位所需的高分辨率数据,尤其是在自动驾驶等动态环境中。这项研究的出现解决了这一挑战,通过提出一种众包方法来生成详细的大气地图,有望显著提高GNSS性能并降低成本。
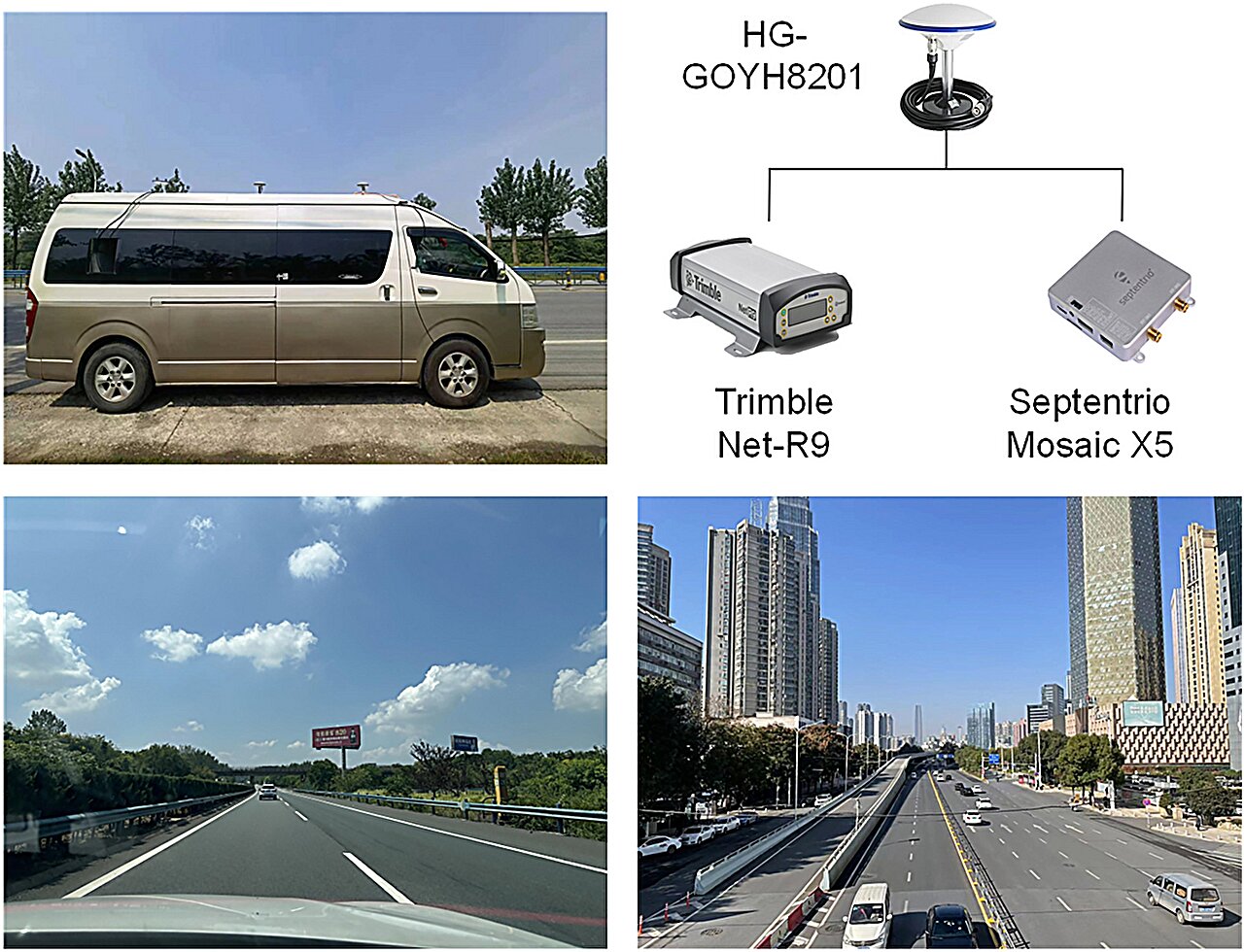
据外媒报道,中国科学院(Chinese Academy of Sciences)的研究人员开发出创新GNSS定位框架,并已发表于期刊《Satellite Navigation》。该研究详细介绍了一种系统,即使用双基站和众包大气(Crowdsourced Atmospheric)延迟校正地图(CAM),以实现高精度定位,这对于自动驾驶和物联网(IoT)等应用来说是一项重大进步。
来源:第一电动网
作者:盖世汽车
本文地址:https://www.d1ev.com/news/shichang/231335
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号