盖世汽车讯 自动驾驶汽车(AV)因其在提高安全性、降低能耗和优化交通流量方面的巨大潜力而成为智能交通系统发展的关键环节。随着自动驾驶汽车先进功能的增加,其运行阶段的安全对于道路车辆行业至关重要。
然而,自动驾驶汽车已发生多起致命事故,凸显了保障自动驾驶汽车安全的重要性和紧迫性。这些事故的原因可以归结为自动驾驶汽车面临的三个典型安全问题:功能安全、预期功能安全(SOTIF)和网络安全。
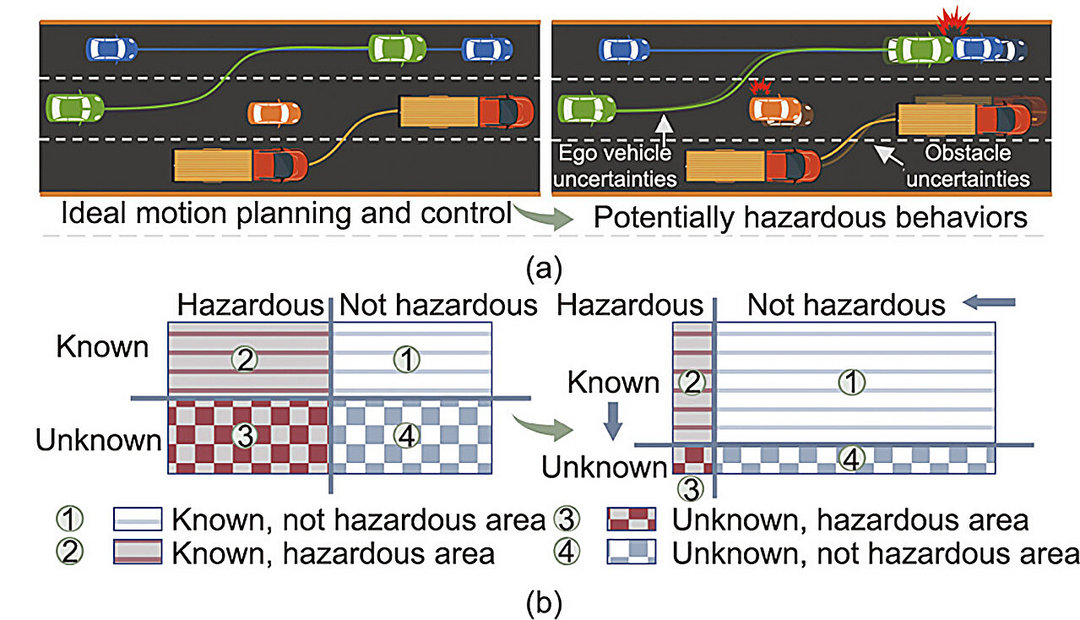
在这三个问题中,SOTIF既是当前的学术研究热点,也是AV应用面临的直接挑战。SOTIF旨在处理潜在的危险行为,包括与规格、性能和态势感知相关的不足或限制,无论是否存在合理可预见的误用,以及周围的影响(例如其他用户、无源基础设施、天气和电磁干扰)。
据外媒报道,考虑到这一点,研究人员在期刊《Engineering》发表的题为“采用Zonotopic TRMPC的自动车辆的安全运动规划和控制框架(Safe Motion Planning and Control Framework for Automated Vehicles with Zonotopic TRMPC)”的论文推断,当前的运动规划和控制技术也存在属于SOTIF范围的问题。例如,模型不匹配等不确定因素必然会导致未来的控制误差,但规划层并没有考虑这些误差在规划周期内的影响。
图片来源:期刊《Engineering》
本研究利用集合论、鲁棒控制理论和可达性分析提出了安全运动规划与控制(SMPAC)框架,旨在增强多维不确定性下自动驾驶的SOTIF。
为了实现SMPAC框架,论文作者们在自动驾驶的控制层和规划层都采用了先进的方法。在控制层,研究人员利用集合论通过可达性分析来有效地分析控制循环内所有可能的不确定性。
在此分析的基础上,研究人员开发出一种灵活高效的基于管的鲁棒模型预测控制器(TRMPC),确保将所有可能的不确定性未来演化收敛到最小的鲁棒正不变集。 同时,TRMPC保证控制误差在一定范围内的传播被限制在一个紧凑集合内。
转向规划层,作者们引入了安全集的概念来描述自我车辆和障碍物的可到达的几何边界。安全集是根据从控制层误差导出的有界紧集构造的。它们作为后续轨迹评估和选择的基本结构。
综上所述,控制层的zonotopic TRMPC和规划层的安全集的深度集成确保了自动驾驶车辆的实际轨迹始终被限制在安全边界内,从而增强了SOTIF。
在硬件在环实验中,研究人员提供了两种典型场景:极端操纵条件下的主动变道场景和正常操作条件下的防撞场景。这些实验验证了所提出的SMPAC框架的安全性、有效性和实时性。他们证明SMPAC可以减少自动驾驶中SOTIF类别内的潜在危险/未知区域。
作者鼓励进一步的研究方向,包括:利用现代线性化方法对车辆系统进行建模,从而细化扰动集以减少SMPAC框架的保守性,并在SMPAC框架中嵌入最先进的运动规划方法以进一步增强自动驾驶的能力。
来源:第一电动网
作者:盖世汽车
本文地址:https://www.d1ev.com/news/shichang/225321
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号