盖世汽车讯 机器人和自动驾驶汽车是技术领域中增长最快的领域之一,或将使工作和交通变得更安全、更高效。由于机器人和自动驾驶汽车都需要准确感知周围环境,因此3D物体检测方法研究领域备受关注。
大多数3D物体检测方法都采用LiDAR传感器来创建其环境的3D点云。简而言之,LiDAR传感器使用激光束快速扫描和测量源周围物体和表面的距离。然而,由于激光雷达对噪声的高敏感性,单独使用激光雷达数据可能会导致错误,特别是在降雨期间等恶劣天气条件下。
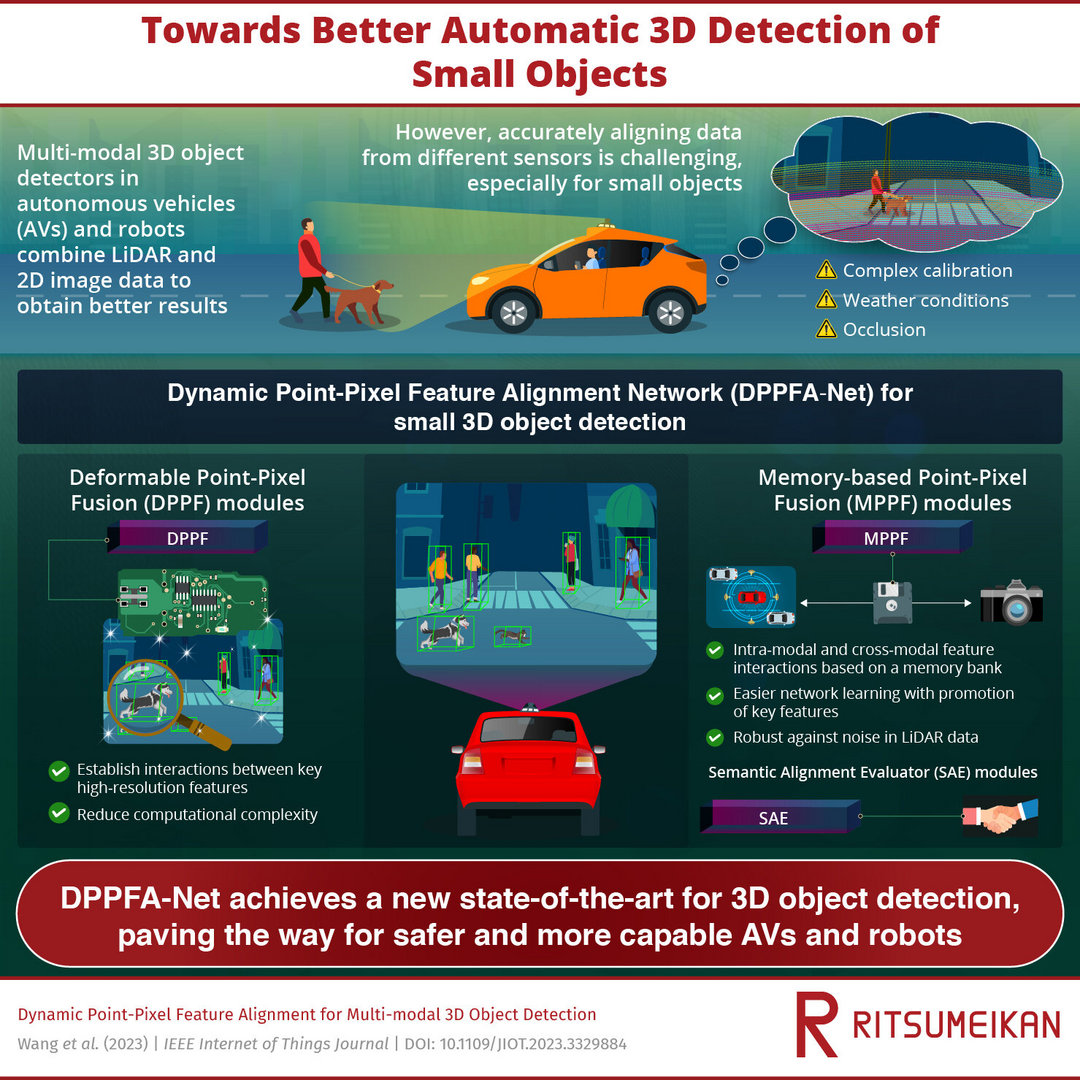
为了解决这个问题,科学家们开发出多模态3D物体检测方法,将3D LiDAR数据与标准摄像头拍摄的2D RGB图像相结合。虽然2D图像和3D LiDAR数据的融合可以带来更准确的3D检测结果,但它仍然面临着一系列挑战,精确检测小物体仍然很困难。由于校准不精确或遮挡等问题,如何充分对齐从2D和3D数据集中独立提取的语义信息很难。
据外媒报道,在此背景下,由日本立命馆大学(Ritsumeikan University)Hiroyuki Tomiyama教授领导的研究团队开发出创新方法,使多模态3D物体检测更加准确和且具有鲁棒性。相关论文已发表于期刊《IEEE Internet of Things Journal》,该方案名为《动态点像素特征对齐网络(Dynamic Point-Pixel Feature Alignment Network,DPPFA−Net)》。
来源:第一电动网
作者:盖世汽车
本文地址:https://www.d1ev.com/news/shichang/216118
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号