半年之前,国产激光雷达厂商速腾聚创宣布了“普罗米修斯”计划,着力打造一系列激光雷达的点云算法,使得激光雷达能够通过点云信息 ,像摄像头那样实现物体识别、分类、跟踪等功能,提供给自动驾驶的合作伙伴。
经过半年的测试发展后,速腾聚创告诉车东西,这套称作“RS-LIDAR-Algorithms”的算法趋于成熟,因此将正式对加入“普罗米修斯”计划的合作伙伴进行开放。速腾聚创也成为继Ibeo之后全球范围内第二家发布此类算法的激光雷达厂商。
具体来讲,速腾聚创此次发布的激光雷达算法有六个模块,为自动驾驶车辆提供自身定位、环境感知方面的六项能力:
通过激光雷达进行环境建模再予以特征匹配,RS-LIDAR-Algorithms能够提供精度在20厘米以内的实时高精度定位能力。
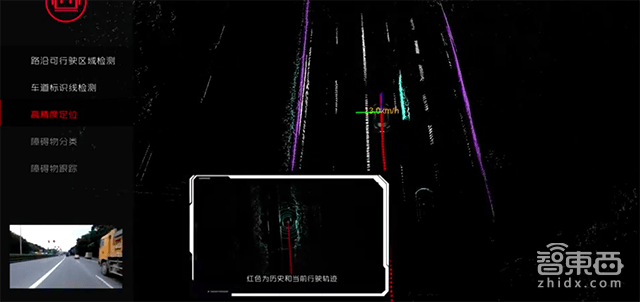
RS-LiDAR-Algorithms提供了路沿检测、可行驶区域检测,确保自动驾驶车不会误开上马路牙子。英伟达的Drive Works中也有类似的算法,不过是基于摄像头来实现。
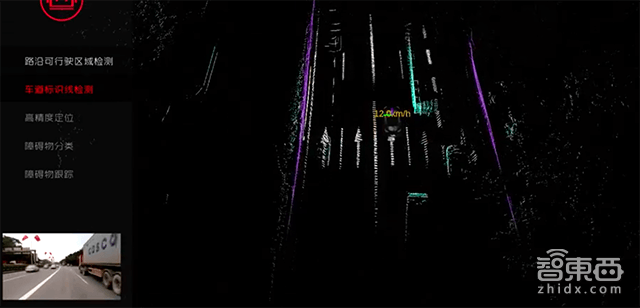
车道标识线识别算法通常是高精度地图公司或者自动驾驶公司来开发,对它的识别是除路沿之外另一个自动驾驶系统进行精确路径规划所必须的重要信息。速腾聚创则把这个工作索性一并做了。除了车道线,路面标识、人行横道线等主要用摄像头来识别的交通标识信息,速腾聚创的激光雷达算法现在也能实现。
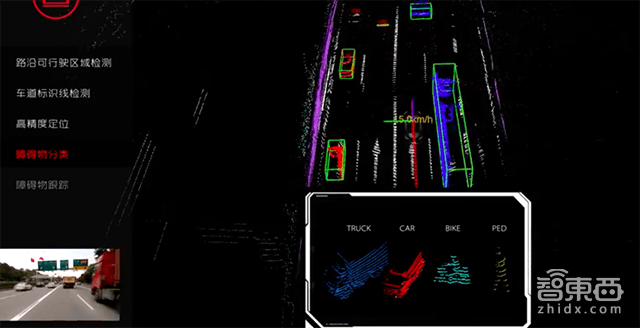
RS-LiDAR-Algorithms也包含障碍物检测模块,可以实时检测并周边多个障碍物的精确位置、距离、姿态、大小、形状等信息。
在障碍物检测信息的基础之上,速腾聚创的激光雷达算法还可以进一步对障碍物进行分类,将障碍物区分为行人、自行车、小汽车、卡车等不同的类别。通常这个工作是交由摄像头和基于普通图像的计算机视觉算法完成,而速腾聚创则是在点云信息上完成了这些工作。
此外RS-LiDAR-Algorithms还提供动态物体跟踪功能,实时估计并输出周边多个动态物体的运动参数,包括速度大小和方向,基于速度信息还可以进一步推算出加速度、角速度等信息。激光雷达由于本来就是测距所用,因此在这一方面会比基于摄像头给出的推测数据更加准确。
一般来说,现有的激光雷达厂商主要单纯做硬件,即使是车载激光雷达的明星企业Velodyne也是如此。要从激光雷达的点云信息中提取有效信息,为自动驾驶的决策提供支持,需要下游厂商自行开发算法。
而速腾聚创发布这一套RS-LIDAR-Algorithms算法,配合其生产的则是直接给出了一套软硬件一体的解决方案,自动驾驶的开发者买了他们的激光雷达之后,可以直接获得其“附赠”的各种自动驾驶感知能力,省了很多事。换句话说,速腾聚创推出这套算法后,他们提供的激光雷达不仅可以看见路况,还可以进一步“看懂”路况。
对于速腾聚创自身而言,则增强了其产品的竞争力。
而对于激光雷达这一传感器而言,算法的成熟也有助于它的进一步推广。摄像头之所以成为了自动驾驶乃至其他各种领域的主要传感器,原因之一就是基于光学图像的计算机视觉算法相当齐全,有大量可用成果降低了开发成本。
不过,目前激光雷达的算法成熟度和成本与摄像头仍有可见的差距。对于降成本,固态激光雷达的技术路径正在谋求大幅削减激光雷达的价格。在算法上,速腾聚创(以及Ibeo)先迈出了一步,而激光雷达的完整生态的建立则需要更多下游厂商的支持乃至同行的跟进。
来源:车东西
作者:Origin
本文地址:https://www.d1ev.com/news/qiye/57274
以上内容转载自车东西,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号