“要对城市NOA有客观的认识。”
这是汽车百人会论坛上,地平线创始人兼CEO余凯的表态,同时也是业界诸多智驾工作者的心声。
大家普遍认为,当前市面上的高速NOA刚好达到“好用”,还未让消费者“爱用”,城区NOA的现状,恐怕连“可用”都是一个问题。
由此可见,高阶智驾的赤膊战还有“终局”未分胜负。赛道玩家现阶段关注的,是解决“可用和“爱用”的问题,接着再解决“好用”的难题。标准场景的通过率、体验更拟人、通行效率更高,成了所有企业重点加码的智驾“痛点”。

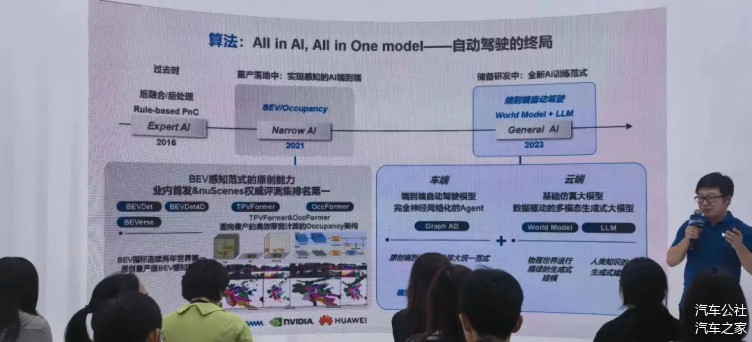
从本届北京车展来看,智驾公司与车企强调的技术热点,已经从去年的BEV+Transformer切换到“端到端”。从车展媒体日的发布会可以看出,大部分高管提及智驾业务,都会提一嘴“端到端”的战略部署——
未来几年,似乎谁真正走通了“端到端”,谁就有可能在智驾终局拿到胜利的入场券。
不过,从“端到端”鼻祖特斯拉来看,基于该公司的投资强度,端到端大模型其实非常烧钱,可能得百亿起步。
毫末智行数据智能科学家贺翔曾在采访中提到,端到端模型是一个纯粹的数据系统,原则上模型参数够大,数据分布性更好,就能不断地提高。烧钱,且费时间,但天花板也很高。
01
高阶智驾争奇斗艳
华为
北京车展前夕,华为发布了以智驾为核心的“乾崑”新品牌。其中,高阶智能驾驶乾崑ADS 3.0采用了端到端的全新架构,基于GOD(通用障碍物识别)大网,实现了从简单“识别障碍物”到深度“理解驾驶场景”的进步。
乾崑ADS 3.0全新架构采用PDP(预测决策规控)网络实现预决策和规划一张网,从而实现类人化的决策和规划,行驶轨迹更类人,通行效率更高,复杂路口通过率>96%。

小鹏
小鹏汽车的智驾一直处于国内第一梯队,据悉,基于端到端大模型,小车的XNGP高阶智能驾驶辅助系统,将完成感知大模型升级和规控大模型上车。
何小鹏表示,目前小鹏汽车已开始公测端到端的解决方案,并将在5月正式对外分享端到端实际数据表现。通过行业首个量产的2K纯视觉占用网络大模型上车,用超过200万个高精度网格重构世界,能清晰识别动、静态障碍物的每一个细节。
商汤绝影
作为首个提出感知决策一体化自动驾驶通用模型的公司,商汤绝影在本届车展首次向公众展示了面向量产的端到端自动驾驶解决方案UniAD(Unified Autonomous Driving)的道路测试。
该方案能在无高精地图条件下,仅依靠视觉感知的实际道路测试成果。无论是复杂城市道路还是无中线的乡村道路上,车辆能高效准确地完成包括大角度左转上桥、避让占道车辆及施工区域、绕行跑步行人等一系列高难度操作。

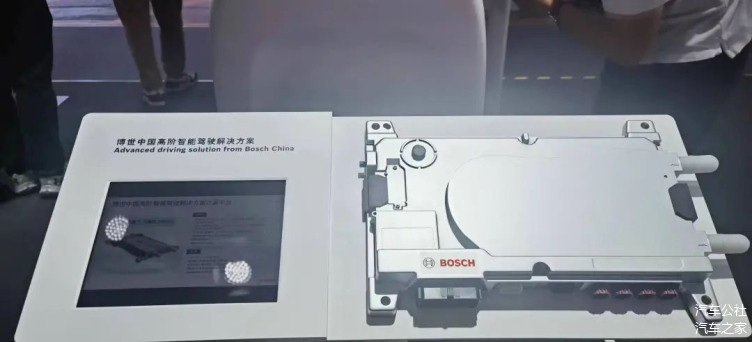
博世
虽然没有强调端到端的布局,但传统供应链巨头博世,成为传Tier1在高阶智驾的一抹亮色。博世在此次车展带来的智驾技术和产品,呈现出跨越式的飞跃。
旗下最新的舱驾一体解决方案,只用一颗芯片就能搞定智驾和智舱,有望在2026年量产,对比当前智舱、智驾双芯片的解决方案,可降本30%。
博世中国高阶智能驾驶解决方案,由博世智能驾驶与控制系统事业部中国区本土开发,已于2023年实现量产。其中,城市领航辅助功能将从5月开始逐步推送。
地平线
地平线展出了全场景智能驾驶解决方案SuperDrive,这是该公司打造的高阶城区智驾样板间。如果说,征程6是地平线软硬结合领域的硬件集大成,SuperDrive则是软件层面的护城河。
凭借动态、静态、OCC(Occupancy占用网络)三网合一的端到端感知架构,数据驱动的交互式博弈算法,SuperDrive在任何道路环境下都能兼顾场景通过率、通行效率和行为拟人。
据悉,SuperDrive可以像老司机一样灵活处理复杂交通流,在拥堵场景下变道成功率提升50%,路口通过率提升67%。
02
新的烧钱巨坑
2022年底,商汤及其联合实验室提出了行业首个感知决策一体化自动驾驶通用模型UniAD,并于次年荣获2023年国际计算机视觉与模式识别会议(CVPR)最佳论文。
如果说,商汤2022年还无法让业界感受到端到端的潜在价值,那么到2023年,这家企业荣获的论文大奖,终于让学术圈和汽车行业意识到端到端在自动驾驶赛道的广阔前景。
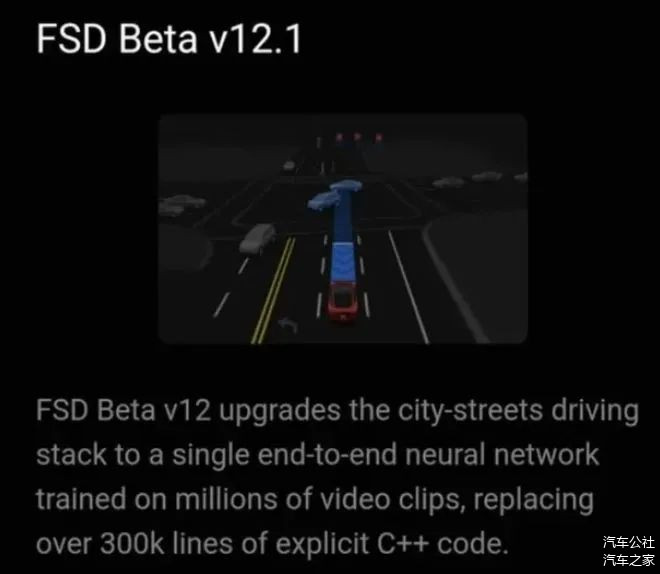
在实践层面,特斯拉曾在去年尝试了特斯拉FSD V12的直播测试,让更多企业看到端到端的落地可能性;今年3月向北美车主推送了FSDV12.3.1版本,引入了端到端神经网络,瞬时掀起业界的极大波澜。
很多人默认,特斯拉是端到端的鼻祖。也正因为此,特斯拉也成了业界抽丝剥茧、详细了解端到端的先锋案例。此前有咨询公司分析,参考特斯拉这几年的投资强度,端到端大模型其实非常烧钱,可能得百亿起步。
前文也提到,毫末智行数据智能科学家贺翔曾在采访中提到,端到端模型是一个纯粹的数据系统,原则上模型参数够大,数据分布性更好,就能不断地提高——
天花板很高,但烧钱,且费时间。
此外,端到端模型的训练非常依赖且消耗算力,仅仅是2024年,特斯拉计划向Dojo超算投入的资金就要超10亿美元。

2023年初,特斯拉曾表示,该公司已经分析了从特斯拉客户的汽车中收集的1000 万个视频片段(clips)。且特斯拉判断,完成一个端到端自动驾驶的训练至少需要100万个、分布多样、高质量的clips才能正常工作。
不仅是烧钱巨坑,端到端还是个长期工程,很多企业在短期内是很难看到结果的。这也意味着,端到端是少数企业的游戏,只有资金储备充足、且愿意长期投资的头部公司,才有能力支持端到端所需的庞大数据与算力。
商汤在此次车展表示,行业里很多企业在布局端到端解决方案,但一般都分为三种——
第一,是决策层和感知层彼此独立的云端计算工程;第二,是组合式端到端,意味着连接感知层和决策层需要强力中介,也更容易落地;第三即真正的端到端,也就是商汤目前开发出的方案,能够让企业以最低成本满足智驾需要。
不过,这套蓄力已久的端到端方案,累计投入了多少资金,商汤绝影并没有提及。
来源:第一电动网
作者:汽车公社
本文地址:https://www.d1ev.com/news/qiye/229579
以上内容转载自汽车公社,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号