据外媒报道,剑桥大学的一项研究表明,自动驾驶汽车组成的车队协同行驶,保持交通顺畅,可以使整体车辆流量至少提高35%。
该大学研究人员为16辆微型机器人汽车程写程序,让它们在一条双车道轨道上行驶,并观察其中一辆汽车停下来时,交通流量的变化。当汽车不协同行驶时,只要一辆汽车停下来,它后面的任何车辆都必须停下来或者减速,等待车流中的空隙,这在现实的道路上很常见。停下的汽车后面很快就排起了长队,整个交通流量都会变慢。
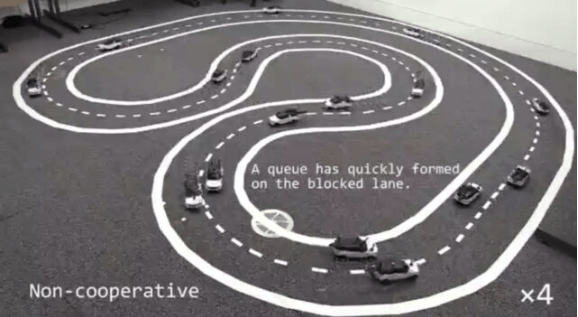
(图片来源:剑桥大学官网)
当车辆在行驶时互相交流和合作,一辆汽车在内侧车道停下,并向其他所有的汽车发出信号,外侧车道上靠近它的车辆就会稍微减速。这样内侧车道上的车辆不需要停下来或者大幅减速,就可以快速超过它。
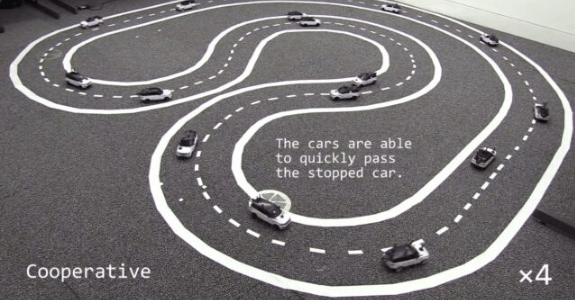
(图片来源:剑桥大学官网)
当一辆人类驾驶汽车与自动驾驶汽车一起进入测试轨道,并以一种咄咄逼人的方式行驶时,其他汽车会避让该司机,从而提高安全性。
这项研究结果将在加拿大蒙特利尔举行的国际机器人与自动化会议(ICRA)上发表,它有助于研究自动驾驶汽车如何在现实的道路上相互沟通,以及如何与人类驾驶的汽车进行沟通。
目前很多多辆自动驾驶汽车测试都是使用数字技术或者规模模型进行。这些模型通常体积大、价格贵,无法进行室内车队实验。 该研究使用的是1:24比例模型车,尺寸大约是20cm×8cm,可以低成本进行室内测试。它们主要由现成的零部件制成,每辆车的基本配置成本约为60英镑(合76美元)。
该研究的合著者、剑桥大学圣约翰学院的本科生Michael He表示,“自动驾驶汽车可以解决很多城市驾驶相关问题,但需要有一种方法让它们协同工作。”研究报告的撰写者、唐宁学院的本科生Nicholas Hyldmar表示,“如果汽车制造商都使用自己的软件开发自动驾驶汽车,那么这些汽车就需要有效地沟通。”
剑桥大学研究人员利用市场上具有真实驾驶系统的汽车比例模型,并配备动作捕捉传感器和Raspberry Pi(一种信用卡大小的电脑),使它们可以通过Wi-Fi通信。他们还调整了自动驾驶汽车的变道算法,使其适用于车队。
他们在“以自我为中心”和“合作”驾驶模式下测试了车队,使用正常和挑衅性驾驶行为,并观察车队对停下的汽车的反应。正常模式下,与以自我为中心的驾驶相比,合作驾驶提高了35%的交通流量。研究人员计划利用该车队在更复杂的情况下测试多车系统,包括有更多车道、十字路口和车型的道路。
来源:盖世汽车
作者:罗珊
本文地址:https://www.d1ev.com/news/jishu/91845
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号