如今,泊车雷达早已不是什么遥不可及的高端配置,几乎所有价位的车型都会配备,只是雷达探头数量多少有所差异而已。无论是新手还是老司机,泊车雷达的出现都极大降低了我们停车难度,同时也能减少视线盲区引发的小剐蹭。泊车雷达探头虽然不起眼,但是这项技术能在民用汽车上得到普及,同样要归功于军事技术的发展。

除了我们非常熟悉的倒车雷达探头,雷达技术在汽车上应用其实远比我们想象中的广泛,比如部分车型配备的ACC自适应巡航系统,同样需要雷达传感器的帮助。进一步延伸,现在各大厂商都在推崇的自动驾驶技术,也同样离不开雷达传感器的支持。当然根据工作方式不同,车载雷达传感器也有许多分类。在介绍之前,首先我们先来了解一下雷达技术的起源。
源自二战期间的“千里眼”
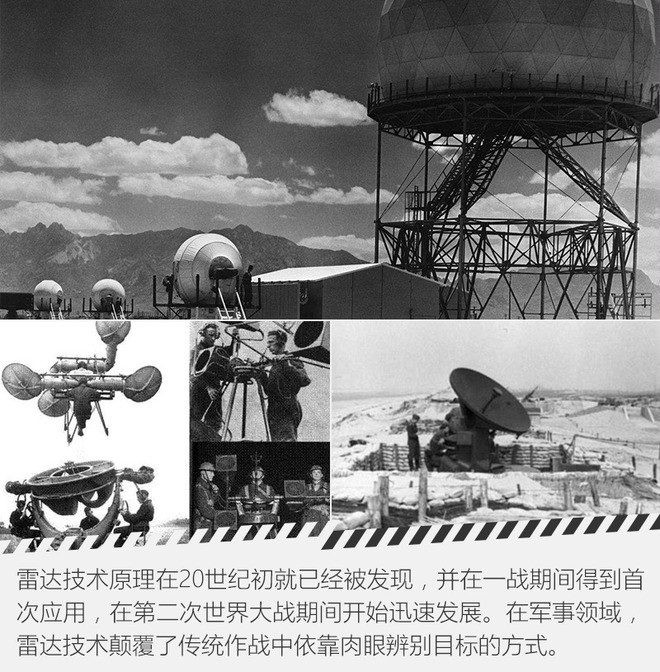
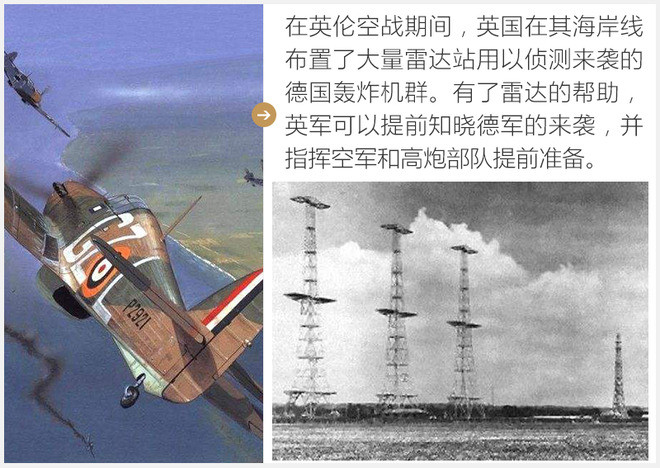
在20世纪30年代至40年代,由于第二次世界大战各参战国都大规模使用飞机、火炮等武器作战,雷达技术也得到了飞速发展。英国人率先将雷达投入到实战中,用以对德国的轰炸机群进行预警探测。后来,又相继出现了机载雷达和火炮雷达。
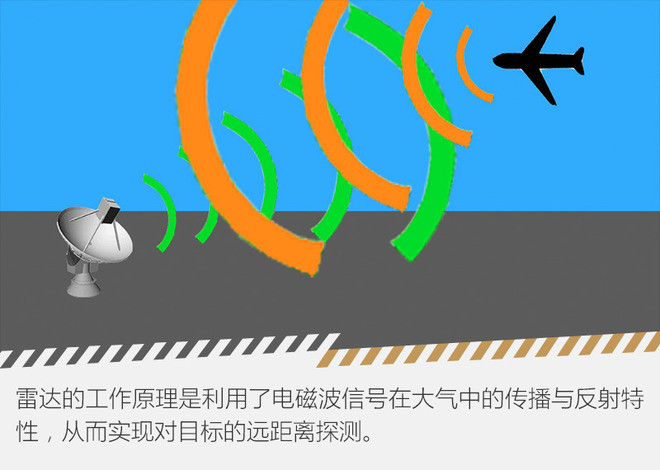
作为一种探测手段,雷达技术简单理解就是通过一个发射装置,向特定区域发生电磁波,当电磁波遇到物体(被探测的目标)会发生散射,其中一部分电磁波会原路反射回来,再被一个接收装置获取。由于电磁波的发射源位置和电磁波传播速度已知,因此只需要计算回传信号的时间差,即可得到被探测目标的方位、距离和高度等信息。
与传统的光学探测(肉眼、望远镜、探照灯等等)相比,雷达的探测距离更远,同时电磁波在大气中的穿透性较强,不会受限于天气、光照条件等客观因素,这个特点深受军事领域欢迎,因此雷达技术在二战中后期得到较广泛的应用,并不断发展。下面简单列举几个雷达技术在二战期间的应用实例:


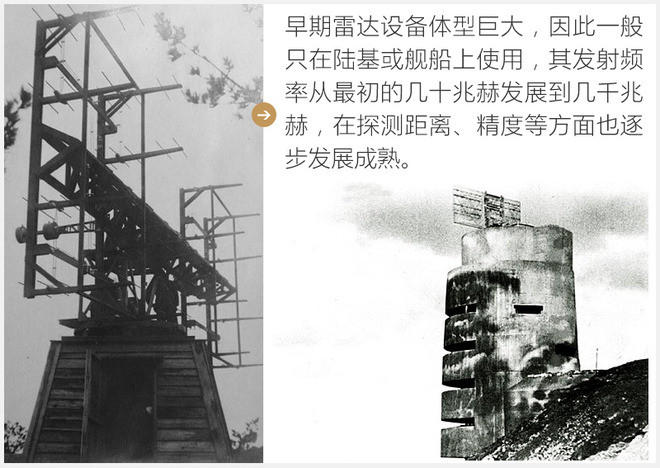
在战争后期,随着显像技术的出现让雷达的探测效率和精度有了进一步发展,同时雷达设备小型化让其可以安装在飞机等装备上,其应用范围进一步扩大。经过战争的洗礼,雷达技术在战后迅速发展,并成为了现代军事装备中不可或缺的重要组成部分。当然除了军事领域,雷达技术在民用领域同样发挥着重要作用,例如气象雷达、雷达导航系统以及测速雷达等等,当然也包括在汽车领域的应用。
常见车载雷达技术了解一下?
随着雷达技术不断发展成熟,出现了包括超声波雷达、毫米波雷达以及激光雷达等等不同分类,但其主要工作原理都是利用信号的发射与反射现象,实现对周围物体的探测。在汽车领域,目前已经得到应用的车载雷达技术包括超声波雷达、红外雷达、毫米波雷达以及激光雷达几大类,它们自身特性不同因此应用场景也不尽相同。

超声波雷达(辅助泊车传感器/倒车雷达)
超声波雷达主要被用于泊车雷达传感器,目前已经成为绝大多数车型必备的实用配置之一。超声波雷达根据用途不同又分为UPA和APA,前者是我们停车时经常用到的障碍物探测传感器,常布置在前后保险杠上。后者则主要用于自动泊车以及并线辅助等,一般布置在车辆侧轮眉处。
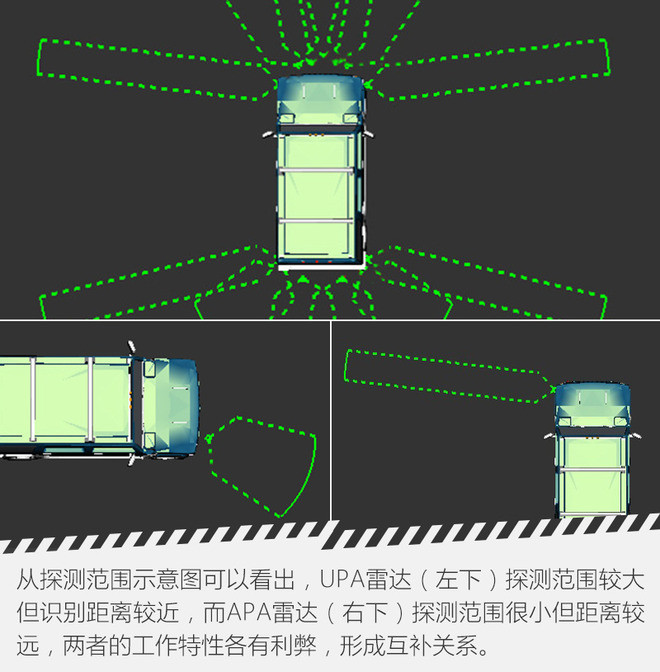
超声波雷达虽然成本低廉且体积很小,但其探测距离相对较近,并且超声波在不同湿度、温度环境下的响应速度变化很大,因此并不适用于高速行驶时的探测。此外超声波雷达传感器只能识别障碍物的大致位置,无法实现更为精确的测量,这也是目前超声波雷达不能用于自动驾驶的主要原因。
红外雷达传感器(夜视辅助系统)
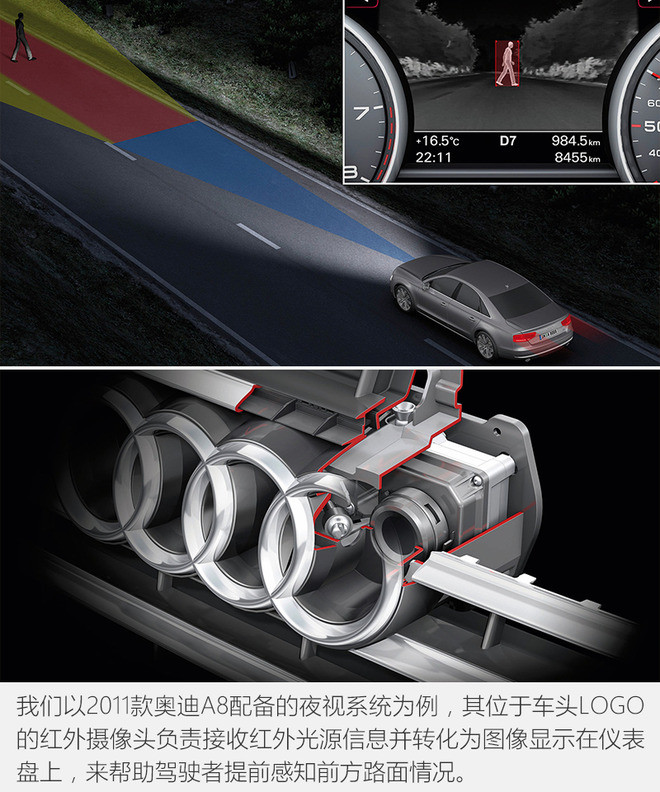
在自动驾驶技术普及之前,部分高端车型曾采用红外雷达传感器来辅助提高驾驶者对前方障碍物的感知能力,即车载夜视系统。根据工作原理不同,红外雷达传感器分为主动式和被动式。其中主动式红外雷达配有红外光发射源和接收装置,可以在夜间低照明环境下发现较远的路面障碍物。被动式红外雷达则仅依靠一套红外接收装置,对外界物体反射的红外信号源进行解析,其在识别精度和距离方面相对较差。
红外雷达传感器虽然在昏暗环境下具有很多优势,但由于其依赖红外信号的特性,在白天阳光下容易受到外界红外光源的干扰,因此并不具备全天候工作能力。此外,红外雷达传感器的有效探测距离相对较近,并不能完全适应自动驾驶技术的要求。
毫米波雷达(ACC自适应巡航)
在泊车雷达、红外雷达等“入门技术”的铺垫下,民用汽车已经变得越来越易于驾驶。接下来,汽车工程师又开始让汽车变得更聪明,并减少驾驶者的负担。在这样的需求背景下,毫米波雷达开始出现在汽车上,并帮助我们实现了ACC自适应巡航等驾驶辅助功能。
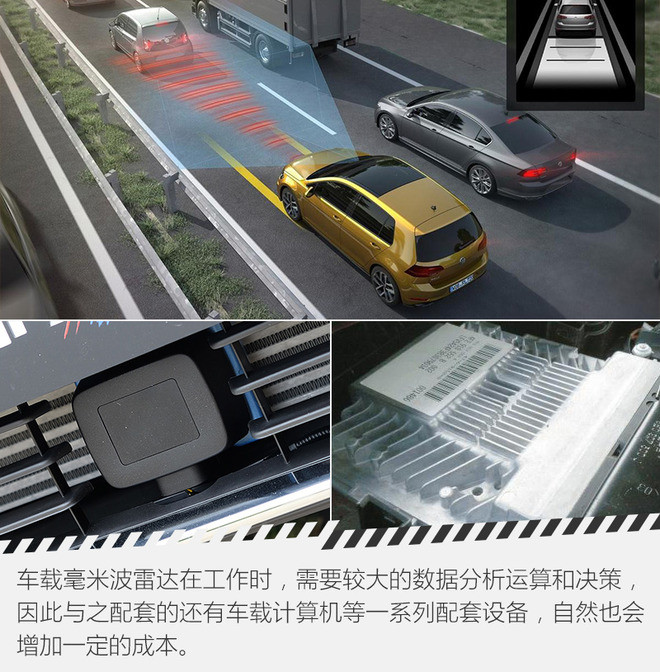
目前车用毫米波雷达主要以77G规格为主,其发射的电磁波长在4mm左右,主要用于中长距离的测距和探测。众所周知,空气中的粉尘颗粒和雨水尺寸普遍小于4mm,因此毫米波雷达在工作时并不会受到这些外界因素的干扰,可以实现全天候工作能力。

与前文介绍的超声波雷达相比,毫米波雷达不仅能够探测障碍物的举例,同时也能对物体的轮廓进行粗略识别。简言之,毫米波雷达可以识别障碍物到底是人还是车,因此其探测精度更为精准,能够实现更为复杂的辅助功能,例如自动跟车、自动刹车等。

当然,毫米波雷达也有自己的局限性。因为电磁波在遇到障碍物后会发生散射,如果两个障碍物距离较近,在毫米波雷达“看来”会变成一个巨大的障碍。不过即便如此,毫米波雷达技术在未来依旧有巨大的发展潜力,在自动驾驶技术中也扮演着十分重要的基础作用。
雷达技术与自动驾驶的未来
正如前文所说,雷达技术在汽车领域已经发挥了越来越重要的作用,现在是时候展望一些雷达与汽车技术发展的未来了。在毫米波雷达的帮助下,我们的汽车已经可以实现有限度的“自动驾驶”功能,例如自适应巡航、车道保持以及自动制动等等。但是这些都属于驾驶辅助范畴,距离真正意义上的自动驾驶还有不小差距。

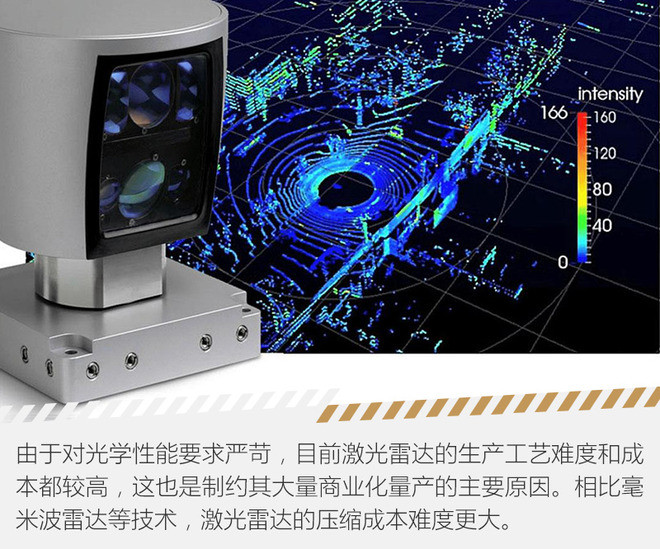
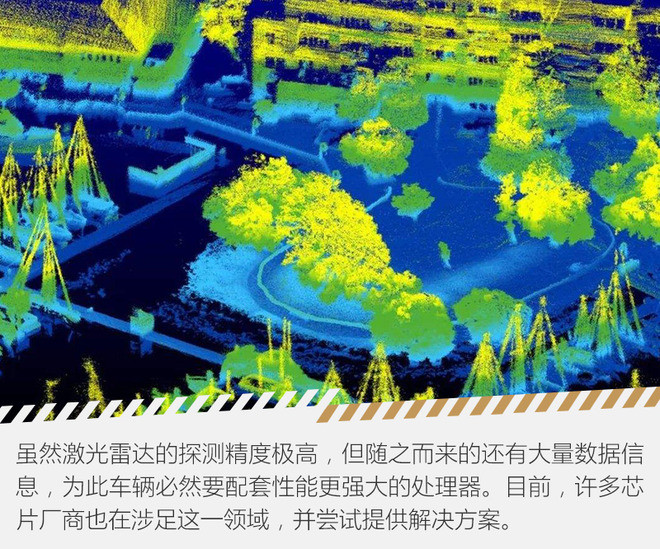
为了进一步提高车辆感知周围事物的能力,工程师又引入了更为先进(昂贵)的激光雷达设备。与毫米波雷达相比,激光扫描在探测精度方面更为出色,甚至可以清晰的勾勒出周围景物的详细轮廓。目前,许多科技公司都在利用激光雷达来测试无人驾驶车辆,甚至有观点认为激光雷达是实现自动驾驶的必备技术之一。

就像所有新兴事物一样,激光雷达在现阶段也存在自己的弊端,因此还不能大规模商用化,主要原因我们下面举例说明:
受限于各种主观和客观因素,激光雷达目前依旧属于试验性技术。不过瑕不掩瑜,在高精度探测能力的“诱惑”下,依旧有很多厂商在致力于研发激光雷达自动驾驶技术。
全文总结
作为汽车感知周围事态的重要基础,车载雷达技术不仅让我们的用车生活更为便捷,同时在实现自动驾驶的发展道路上也扮演着地基作用。
来源:网通社
本文地址:https://www.d1ev.com/news/jishu/75696
以上内容转载自网通社,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号