苏黎世联邦理工学院自动驾驶系统实验室(ETH Zürich's Autonomous Systems Lab)的研究人员近日研发出一款用于视觉定位系统的地图管理程序,专门适用于多辆车在户外环境中操作。该程序解决了将大量视觉定位数据整合进终身视觉地图的挑战,可在所有外部环境条件保持一致的情况下,提供有效定位。
开展此研究的研究人员之一Mathias Bürki表示:“自己定位是包括自动驾驶车辆在内的所有移动机器的关键。虽然大多数自动驾驶研究车辆都配备了昂贵的3D激光雷达传感器,但对于未来此类自动驾驶车辆是否适合量产仍存疑。另一方面,摄像头传感器很便宜,已经用于目前的车队(如用于停车辅助系统),所以,我们一直在研究将摄像头作为主要传感器,实现自动驾驶车辆精确定位的潜力。”
为户外环境研发视觉定位系统遇到的主要挑战之一是需确保此类系统能够很好应对外部环境变化,既包括照明、阴影等短期变化,也包括季节变化等长期变化。
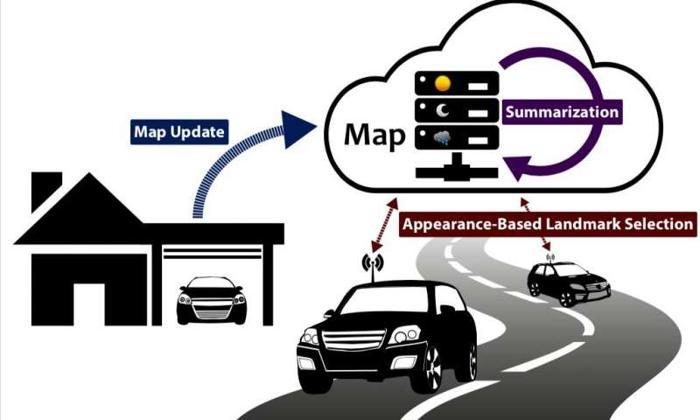
过去的研究发现,为视觉定位创建的地图,理论上可以适应不同的户外环境工作。然而,此类地图非常昂贵,在维护此类地图的服务器和自动驾驶车辆时,需要花费大量资源。虽然有很多的解决方案可以降低成本、解决该复杂问题,但是,目前为止,都是处于孤立的研究中。苏黎世联邦理工学院自动驾驶系统实验室研发的地图管理程序的工作原理是,随着时间推移,不断向地图添加新的数据集,以保持地图更新,更好地应对外部环境条件。
Bürki表示:“我们最有意义的发现是,构建此类视觉定位和地图系统是确实可行且符合实际的,此外,还非常高效,可扩展,从长期来看,可在室外环境中提供准确定位。另一发现是,基于外部环境的在线地标选择与汇总的离线地图可很好协作,相互补充。”
未来,大多数高性能的自动驾驶车辆很可能会配备3D激光雷达传感器,目前,此类传感器在确保安全性以及确保车辆有效感知包括行人在内的周围障碍物方面至关重要。最近,此类传感器的成本大幅下降了,将有助于它们在未来几年得到广泛普及。
Bürki表示:“现在,我们将更多的研究重点放在如何使用激光雷达传感器支持视觉定位,特别是在光线不好的情况下,摄像头达到了探测极限,而激光雷达又非常适合黑暗条件的情况下。”
来源:盖世汽车
本文地址:https://www.d1ev.com/news/jishu/75368
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号