高精地图作为无人驾驶领域的稀缺资源以及刚需,在整个领域扮演着核心角色,可以帮助汽车预先感知路面复杂信息,如坡度、曲率、航向等,结合智能路径规划,让汽车做出正确决策。
本文由浩数资本整理编写完成,并引用了部分券商研报,文末可查看资料来源。
1 高精地图在无人驾驶领域的作用
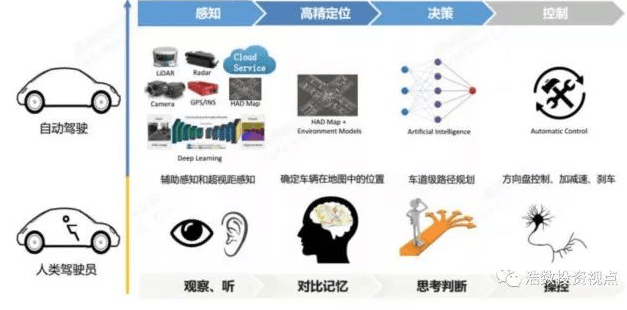
跟人类驾驶员的驾驶过程一样,自动驾驶也需要经过感知、高精定位、决策、控制四个步骤。人类的感知通过眼睛、耳朵,自动驾驶则通过激光雷达、毫米波雷达、摄像头、惯导系统等传感器。接着是高精定位,人通过将看到听到的环境信息与记忆中的信息对比,判断出自己的位置和方向,自动驾驶则需要将传感器搜集的信息跟储存的高精地图对比,判断位置和方向。最后人类驾驶员思考判断后操控汽车开向目的地。自动驾驶通过人工智能算法决策做出车道及路径规划,给制动、转向、加速等控制器下达指令,控制车辆开往目的地。在自动驾驶过程中,高精地度起到了高精度定位、辅助环境感知、规划与决策等功能。
高精度定位:把自动驾驶汽车上传感器感知到的环境信息与高精地图对比,得到车辆在地图中的精确位置,这是路径规划与决策的前提。
辅助环境感知:在高精地图上标注详细道路信息,辅助汽车在感知过程中进行验证。比如车辆传感器感知到前方道路上的坑洼,可以在跟高精地图中数据对比,如果地图中也标记了同样的坑洼,就能起到验证判断的作用。
规划决策则:是利用云平台了解传感器感知不到区域(比如几公里外)的路况信息,提前避让。
2 高精地图与普通导航地图的区别
高精地图与现在常见的导航地图(比如车载导航地图)相比有很大不同,主要体现在使用者不同、用途不同、所属系统不同、要素和属性不同。导航地图的使用者是人,用于导航、搜索。而高精地图的使用者是计算机,用于高精度定位、辅助环境感知、规划与决策。因此导航地图在车内属于车载信息娱乐系统,带显示屏,而高精地图属于车载安全系统,不需要屏幕。要素跟属性方面,导航地图仅包含简单道路线条、信息点(POI)、行政区划边界,而高精地图包含详细道路模型,包括车道模型、道路部件、道路属性和其他的定位图层。

(资料来源:高德,中信建投证券研究发展部)
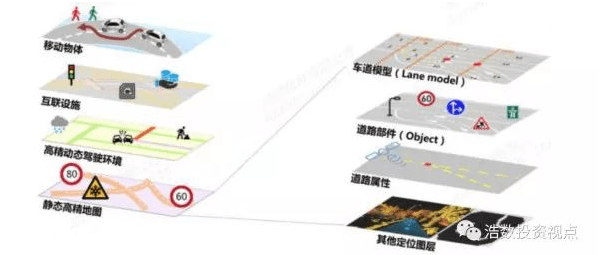
高精地图分为两个层级,最底层的是静态高精地图,上层是动态高精地图。
静态高精地图中包含了车道模型、道路部件、道路属性和其他的定位图层,这是现阶段图商重点在做的。首先高精地图要满足车道级的自动驾驶导航,因此需要包含道路细节信息,如车道线、车道中心线、车道属性变化等,比如能让汽车知道哪些区域是虚线能够变道。此外车道模型中还需要包含道路的曲率、坡度、航向、横坡等数学参数,好让车辆能够准确的转向、制动、爬坡等。这些信息构成了车道模型。还需要包含交通标志牌、路面标志等道路部件,还要标注出特殊的点如 GPS 消失的区域、道路施工状态等。
高精地图由静态地图和动态地图组成
(资料来源:高德,中信建投证券研究发展部)
静态高精地图包含的属性

(资料来源:中信建投证券研究发展部)
高精地图包含曲率、坡度、航向、横坡等数学属性
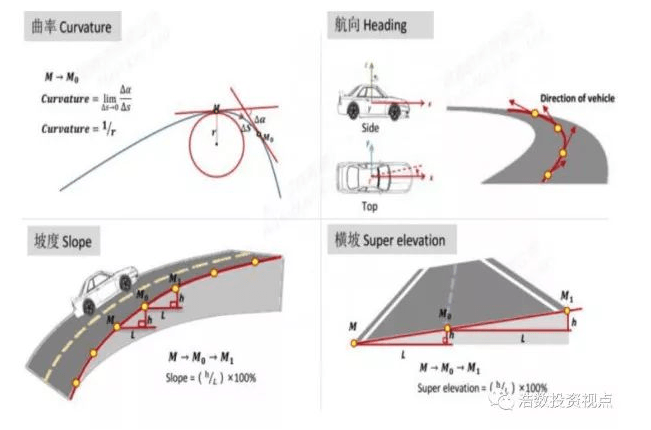
(资料来源:高德,中信建投证券研究发展部)
在静态高精地图之上,还需要增加动态高精地图,比如道路拥堵情况、施工情况、是否有交通事故、交通管制情况、天气情况等动态交通信息。由于路网每天都有变化,如整修、道路标识线磨损及重漆、交通标示改变等。这些变化需要及时反映在高精地图上以确保无人车行驶安全。实时高精地图有很高的难度,但随着越来越多载有多种传感器的无人车行驶在路网中,一旦有一辆或几辆无人车发现了路网的变化,通过与云端通信,就可以把路网更新信息告诉其他无人车,使其他无人车更加聪明和安全。
3 高精地图等商业模式
转变交付模式,图商转型服务商
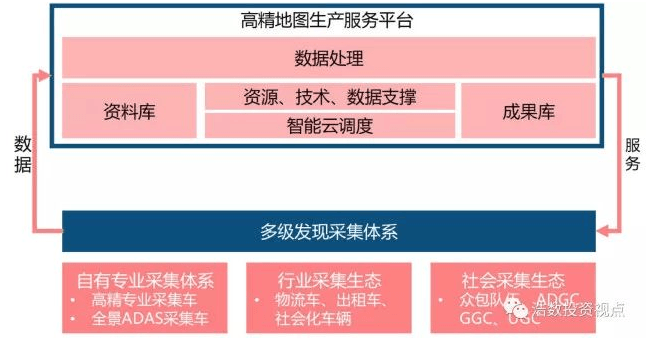
动态地图需要实时更新,这使得图商传统的销售离线的 license 的商业模式开始出现转变。为了满足高精地图的实时更新,需要多级采集体系,采用自由采集体系、行业采集体系、社会采集体系多方融合的方式来完成。
自由专业采集体系是图商自己的高精专业采集车、全景 ADAS 采集车上路采集,方法跟第一步静态高精地图的生产一样。其次是行业采集生态,如物流车、出租车等车辆上的 GPS 、摄像头等传感器能传回实时的道路轨迹和路况信息,这也是现在导航地图中采集交通动态信息的方法之一。
众包模式,特别是 UGC 模式的重要性在未来将不断提高。在自动驾驶时代,每辆车上的激光雷达、摄像头等传感器都在实时采集道路信息,这些采集的信息上传云平台后进行数据处理,通过激光点云识别技术、运用深度学习方法的图像识别技术以及大数据的处理能力实现自动化验证及人机交互式验证实现动态高精地图的实时更新。
高精地图需要实时更新的特性打破了过去图商只是向主机厂或者车载信息娱乐企业销售 License 的商业模式,开始向地理信息数据服务商转型。而且重要性也大幅上升,传统汽车中,导航地图只是车主选配的功能。在自动驾驶汽车里,高精地图是不可或缺的核心部件。图商在产业链中的角色正在逐渐从传统汽车时代的供应商转变为自动驾驶时代的重要参与者、合作者、服务商。当然图商的商业模式在从 license 向service 的转型过程中还有很多问题需要克服。比如如果汽车的交付模式没有变,依然是主机厂通过 4S 店将车辆销售给客户的钱货两清模式,那么后续地图服务的费用该如何收取。
(资料来源:高德,中信建投证券研究发展部)
转变合作模式,高精地图向 C 端延伸
除了向车厂或者自动驾驶出行服务商提供地理信息数据服务这种 B 端的业务,高精地图也会向 C 端延伸。
因为地图是用户获取信息的核心入口之一,特别是在自动驾驶这种场景下,乘客通过车载地图搜索周边的商店、酒店、电影院等,选为目的地后让车辆自动行驶过去。甚至可以直接在地图上查看商店的评价,并下单支付,实现流量的多途径变现,从而将现在移动互联网的生态完美的移植到自动驾驶时代。
随着竞争和博弈的加剧,高精地图的行业生态可能会朝着以下几种情况发展:
如果 C 端收入丰厚,B 端收费下降甚至免费。如果 C 端业务的收入非常丰厚,那么用户量才是地图运营商最关心的,为了扩大用户量,肯定会降低 B 端的收费来扩大车厂前装的市场份额。甚至像手机导航 APP 一样最后变成免费。
车厂收购图商。高精地图处于自动驾驶的核心地位,且需要车辆实时与云平台同步。车厂为了不将数据传到第三方平台,同时为自身转型出行运营商奠定基础可能会收购高精地图公司。比如奔驰、宝马、奥迪收购高精地图商 HERE 剑指自动驾驶。
出行服务商自建高精地图。比如百度的高精地图是其整个自动驾驶开放平台的重要组成部分。Google 的高精地图目前只服务其自己旗下的自动驾驶,披露的信息也非常有限。Uber、通用 Cruise 等也都在布局高精地图。
Mobileye 众包模式 VS Google 集中模式
目前主流的高精度地图数据采集主要包括以 mobileye 为代表的众包模式和以高德为代表的集中制图模式。
Mobileye:众包模式制作高精度地图的代表
Mobileye 要做的高精度地图 Roadbook (路书)主要针对自动驾驶情景,该地图将重点放在路上的各种导流标志、方向标识、信号灯等,依靠这些建立的路标,从微观上在行驶过程中为车辆提供指引。这种收集方式可以改善由整到零那种传统方式所带来的高成本、速度慢的缺点。为此,mobileye 需要和整车厂合作,借助不同品牌大量级的车辆上摄像头获取到的数据,能够作为地图的数据来源,能够保证数据的更新率;随着车载传感设备的普及,地图制作的效率也会逐渐提升。
众包模式相关厂商

(资料来源:长江证券研究院)
Google:专业地图测绘车集中制图模式
谷歌针对自动驾驶,提出推出全新高精度地图,利用改造的丰田汽车,进行高精度地图测绘,目前已经累积了超过 120 万英里无人驾驶里程。目前,该地图主要供自家的无人驾驶汽车使用。
高精地图数据采集方式
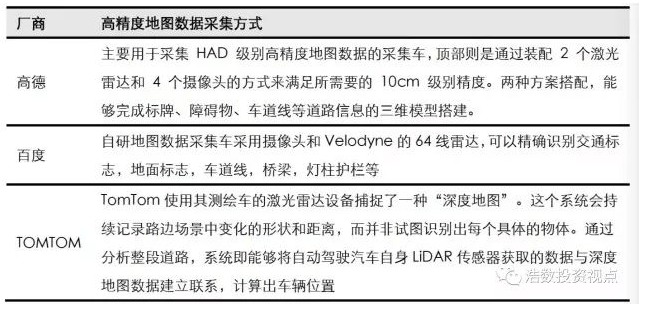
(资料来源:长江证券研究院)
未来两种模式有望实现共存:以高德的高精度地图为例,由于地图采集车造价超过了800 万人民币,高昂的造价限制了地图数据大范围、高频率的采集更新,因此这部分数据仅作为高精地图基础数据,另外,高德计划利用阿里的菜鸟物流车、神州专车等半社会化商用车,以众包模式对高精度地图实现数据补充。
集中模式 VS 众包模式

4 高精地图的高准入门槛
由于地图行业涉及国家机密,政策壁垒将各类国外图商挡于门外,为国内高精地图企业创造了稳定发展的契机。以政策导向来看,国内高精度地图市场必将是国内厂商所主导:由于政策对国内图商的鼓励和对外资公司排斥,国内高精度地图行业必将由内资所主导,国外地图巨头很难进入。
以严格的图商准入制为基调:由最近几年频繁出台的政策可以看出,国家越来越重视地图产业的发展,以完善地图市场管理机制作为政策出发点,制定严格的市场准入政策,对图商资质进行审查,并将不符合资质的图商踢出市场。
针对外资图商完全排斥:由于地图行业涉及到国家机密,所以禁止外资企业开展地图采集工作。针对互联网服务和信息服务业务,也实施了严格的外资准入制度,外资比例必须低于 50% 。
政策壁垒
2014 年,国家测绘局印发修订后的《测绘资质分级标准》,要求申请资质测绘单位同时达到通用标准和相应的专业标准,包括:大地测量、测绘航空摄影、摄影测量与遥感、地理信息系统工程、工程测量、不动产测绘、海洋测绘、地图编制、导航电子地图制作、互联网地图服务。其中导航电子地图制作和互联网地图服务是关系到能否开展车载高精度地图业务的前提条件。
互联网地图服务资质:进入地图相关行业必备资质
2012 年,国家测绘局共审核批准包括百度、新浪、腾讯、搜狗等的 166 家单位为互联网地图服务甲级测绘资质单位。
甲级单位要求:
至少要有 5 名具备国家级地图安全审校资格的人员,且必须有独立地图引擎,这两项关键指标,一个是人才指标,一个是核心技术的指标。
乙级单位要求:
至少要有 2 名具备省级地图安全审校资格的人员,乙级资质单位更适合从事大众类的LBS 服务,这也符合 check in 、手机地图、手机导航等众多 LBS 应用商的现实情况, 即专注于应用层面的开发和运营。而包括基础地图数据的处理和维护,甚至地图 API 接口在内,都是与更专业的甲级资质单位进行 B2B 的合作,直接调用。没有地图资质的单位,也可通过与拥有甲级或乙级资质的单位合作,取得相应的使用授权。
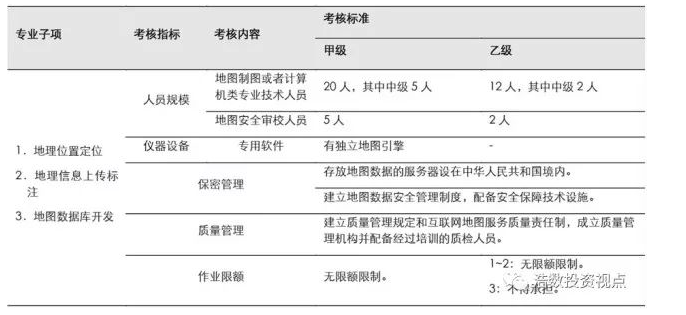
(数据来源:长江证券研究所)
资源壁垒
巨额前期投入,一般企业无法负担。地图制作是一个繁复的过程,目前,就拿普通的互联网地图来看看,大致是通过实采和卫星遥感而成。通过开车沿着道路行驶,记录道路实景数据(如限速标志、路牌),通过卫星遥感,生产小比例尺下显示路网以及精细区域道路(如小区道路)。
高精度地图信息的收集相比于普通地图对信息的需求更大,行驶路段都需要配备激光雷达的数据采集车进行实测。例如四维图新拥有 600 辆数据采集车,可以采集全景影像数据、路面影像数据、亚米级高精度 GPS 数据、路测近距离激光雷达等高精度数据,因此花费会更高。因此高精度地图是一个资金密集型的行业,发展优势大,边际成本低。
从日本、欧美导航电子地图发展经历来看,经过前期快速发展到后期激烈市场竞争,国际范围内排名前五的地图提供商垄断出中国市场外 95% 的市场份额。国内就前装地图市场而言,三大图商占据 99% 的市场份额。造成这种市场结构是因为地图数据的采集和维护占固定成本绝大比重,在与竞争对手投入相当的情况下,没有稳定市场份额和良好的盈利,无法与其他具有先发优势并已形成规模的对手竞争。
行业壁垒
高精地图作为 ADAS 重要一环,涉及到自动驾驶的安全性问题。整车厂在进行地图供应商选取时,必将经过长期测试和慎重选择,一旦确定就很难更换。利用整车厂相对封闭的供应链,图商的先发优势明显。以传统前装地图为例,目前主要有四维图新、高德和易图通三家地图供应商,占据 99% 的前装地图市场份额,这三家地图供应商由于具有各自稳定的整车厂客户群体,因此整体前装市场格局很难发生较大改变。
传统前装市场的市场格局(2016 年)
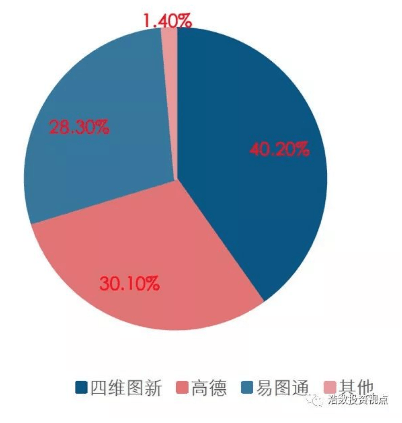
(资料来源: 艾媒咨询,长江证券研究所)
5 国外高精地图玩家
国外的高精地图主要有 Here 、TomTom 、Waymo(原 Google 地图)等老牌图商,其中 Waymo 的高精地图目前仅用于自己的无人车披露信息非常少。此外因为美国的地图测绘政策限制较少,因此成为高精地图创业者的天堂,比较有名的初创公司DeepMap 、CivilMaps 、lvl 5 、Carmera 。初创企业往往有一个自己主打的算法技术,比如 CivilMaps 能将 1T 的激光雷达点云数据压缩到 8MB,Carmera 融合摄像头和激光雷达的图像获得更好的传感效果等。但是云端的存储、运算、通信能力是初创企业普遍的短板。另外 Uber 、通用 Cruise 等也都在布局高精地图。
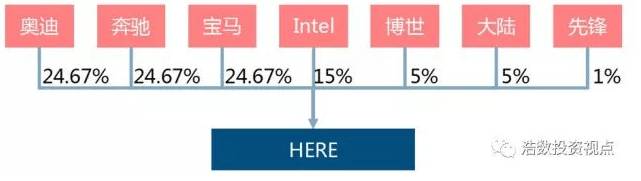
奔驰、宝马、奥迪收购 HERE,构建高精地图联盟
Here 前身为美国地图公司 NAVTEQ,2008 年被诺基亚以 81 亿美元的价格收购NAVTEQ,并入自己的 Here 地图部门。2015 年 4 月,诺基亚宣布剥离 Here 部门,吸引了宝马、奔驰、奥迪、谷歌、Uber、Facebook、百度、腾讯(联合四维图新)来竞标。最终奔驰、宝马、奥迪临时组成的联合体以 28 亿欧元(约 31 亿美元)全资收购 Here,三家各占 1/3 的股权。Here 的地图数据覆盖约 200 个国家,超过 4600 万公里。
在北美以及欧洲市场,HERE 地图为 80% 有导航功能的轿车提供地图数据(2015 年数据),每年超过 1000 万辆新车安装了 Here 服务,宝马、奔驰、丰田、日产均为其客户
为了推进自动驾驶、高精地图联盟,HERE 先后引入了 Intel (15%)、博世(5%)、大陆(5%)、先锋(1%)的投资,涵盖了芯片、传感器等解决方案。与Intel 的合作将联合开发一个高度可扩展的概念验证架构,支持高度和全面无人驾驶中的高清地图进行实时更新,双方还将探索物联网和机器学习领域的机会。与博世、大陆、先锋合作,使用他们的车载传感器(激光雷达、毫米波雷达、摄像头等)来实时更新地图。
(资料来源:wikipedia,中信建投证券研究发展部)
HERE 的发展也从一个侧面折射出车企正在抱团迎接自动驾驶时代的转型。 2015 年收购的时候,外界并不看好奥迪、宝马、奔驰为了收购而临时组成的松散联合体,但是在收购后的三年里,HERE 的发展很不错,并且通过引入战略投资的方法深度绑定合作伙伴。而车企的抱团却愈演愈烈,2018 年 3 月,奔驰和宝马宣布将两个公司的汽车共享、按需出行、网约车、泊车、充电这 5 大业务合并,成立合资公司各占 50% 股份,共同加速向出行服务商转型。
国内高精地图玩家
和美国不同,我国有比较严格的地图测绘政策限制,目前拥有「导航电子地图资质单位名单」的企业有 14 家。分别是四维图新、高德、长地万方、凯德、易图通、城际高科、国家基础地理信息中心、科菱航睿、光庭信息、浙江省第一测绘院、江苏省基础地理信息中心、灵图、立德空间信息、滴图科技。百度地图就是通过子公司长地万方开展导航电子地图测绘的。
国内的地图行业呈现三足鼎立的状况,百度地图、高德(阿里)、四维图新(腾讯),其背后是互联网巨头对地图入口的争夺。当然主机厂也不会将自动驾驶时代的附加红利拱手让给科技公司,比如上汽一方面跟阿里成立了合资的斑马网络,开发了车载操作系统,里面使用了高德的地图,一方面又向高精地图初创公司中海庭。
目前国内有 14 家地图具有导航地图甲级资质,四维图新、高德、易图通瓜分车载导航的前装市场,一共占据 98% 的市场份额。凯立德以 70% 的市场占有率在后装市场一枝独秀占据,目前这些公司或已经被互联网巨头所收购,或被其入股。

(资料来源:长江证券研究所)
7 高精地图市场预测
我国车载地图市场分为前装和后装两部分。前装地图产品是指汽车出厂以前安装在整车上的地图产品,是原厂车本身的组成部分,集成良好,需要整车质保,质量要求高,价格相对也较高;后装地图产品是指汽车出厂以后,按照用户要求安装在整车上的车载地图产品单独出售,售价低,门槛低,走差异化、个性化的路线。
随着车载电子前装化以及消费者对地图产品认知度的大幅提升,目前前装车载地图正逐渐向中低端车渗透,挤压后装市场空间。根据易观国际数据显示 2015 年中国车载地图系统前装市场出货量达 371.2 万台,较 2014 年同比增长 47.8% 。Frost& Sullivan 的数据同时指出,从 2006 年到 2015 年,中国车载前装地图市场销量及装配率持续增长,从 2006 年 3.81% 的装配率一度增长至 2015 年的 17.6%,创下历史新高。由此可见,中国前装车载地图市场发展迅猛且未来仍有广阔的空间。
汽车地图系统前装市场增长迅速
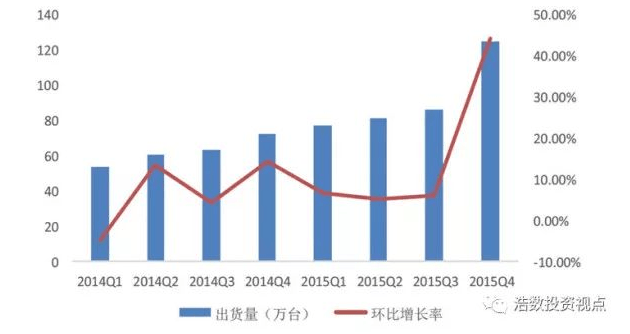
(资料来源:易观智库,国海证券研究所)
海外研究高精地图单车价值约为 200 美金,随着自动驾驶汽车在 2020 年后的量产出现将迎来高速增长。由于国外高精度地图发展相对更为成熟,相关市场估算更具参考价值,根据高盛对高精度地图全球市场判断,预计未来的十五年高精度地图行业将迎来黄金发展期,到 2020 年高精度地图市场为 21 亿美元,2025 该市场将达到 94 亿美元。相比而言,国内高精度地图商业模式尚未清晰,未来具体市场大小难以预判,然而根据国内汽车市场约占全球车市 30% 的份额,随着国内高精度地图技术和商业模式逐渐成熟,国内高精度地图市场也不容小觑。
全球高精度地图市场预测

(资料来源: Goldman Sachs Global Investment Research,长江证券研究所)
8 结语
高精地图作为无人驾驶领域的稀缺资源以及刚需,在整个领域扮演着核心角色,可以帮助汽车预先感知路面复杂信息,如坡度、曲率、航向等,结合智能路径规划,让汽车做出正确决策。由于高精地图涉及到国家安全等多方面因素,目前拥有导航电子地图甲级资质的企业一共只有 14 家,且短时间内较难开放更多的牌照,阿里、腾讯、百度纷纷通过收购图商的方式拿到该资质。尤其是在传统前装地图领域,目前主要有四维图新(腾讯)、高德(阿里)和易图通(阿里)三家地图供应商,占据 99% 的前装地图市场份额,这三家地图供应商由于具有各自稳定的整车厂客户群体,因此整体前装市场格局很难发生较大改变。
作者之前对家了几家海外高精地图的优质企业准备回国设立公司,由于牌照的问题,需要通过与国内图商合作的方式来开展国内业务。
另外,高精地图的商业模式正逐步从图商转地理信息数据服务商转型,在此过程中还有很多问题需要克服,尤其是在后续地图服务费收取的问题上。
由于该商业模式还在探索中,因此很难给出准确的市场规模估计。假设仅通过向车厂(或出行运营商)按年收取服务费,2017 年国内汽车保有量是 2.17 亿辆,按每辆车每年收 100 元服务费,市场规模超过 200 亿元。当然,这只是一个简单的假设,后面探索的道路还有很长。
来源:电子发烧友网
本文地址:https://www.d1ev.com/news/jishu/72972
以上内容转载自电子发烧友网,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号