借着这个热点话题,我们来谈谈整车企业的总体战略方向,其实有个核心的问题,是未来的车辆需求在美国、欧洲和中国一线城市是增加还是减少的。前者代表可以继续增加平台去抢市场,后者需要仔细权衡一下是不是需要在具体车型上进行收缩。所以我们看到美国三家企业是选择一定尺度的收缩,日本的几个企业在整合之后考虑调整,而德国汽车产业选择削减柴油和内燃机,加大电动汽车的投入。而自动驾驶的战略,是几家考虑的重点话题,每家方式方法可能有不同。这次的热点,以通用来说,总体看看以自动驾驶服务为导向的Cruise Automation和高端车辆辅助驾驶系统Super Cruise,从自动驾驶服务和高端车型的演进,从两边一起使力,分两种路径去布局。
第一部分 自动驾驶服务
我们来回收这笔交易,现在看来,还真是特别的有意思呢。这个钱,当时来看是天价,现在整个业务的价值变成了100多亿美金。
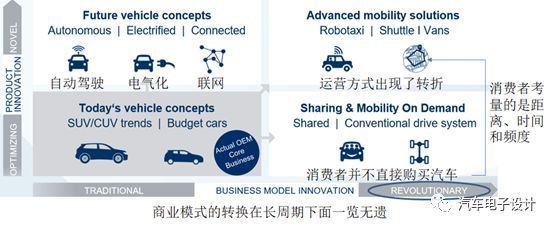
在汽车电动化、车辆网络连接还有自动驾驶的技术支持下,基于车辆共享化前提展开的出行即服务影响着汽车企业的未来。在这个逻辑里面,越是前面的企业存在着很大的挑战,当公众观念改变和消费者的习惯随着技术进步发生转向的时候,企业自身是无法抵抗这种转变的。
通用汽车也有类似转型的内容,电气化、智能网联、自动驾驶和共享服务相结合,将驱动未来个人出行方式的实现。公司致力于研发先进技术,将全球资源与本土优势相结合,积极推动汽车行业由传统制造业向智能出行服务业转型。
咨询公司Navigant的一份新报告《Navigant Autonomous Driving Leaderboard》引起汽车界人士的广泛关注,报告里面对于现有具有代表性的19家无人驾驶汽车企业并对它们进行了排名
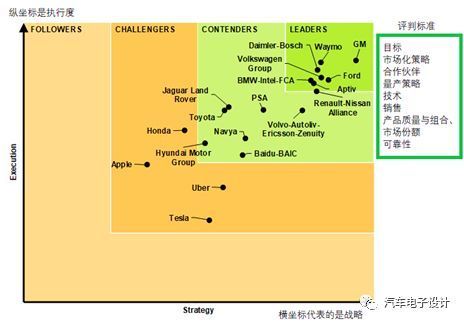
并且被分为四类:领导者、竞争者、挑战者和追随者:
领导者:通用汽车、福特汽车、Waymo(Google)、大众汽车(主导是奥迪)、戴姆勒-博世、雷诺日产联盟、安波福(德尔福分离)、宝马-英特尔-FCA
竞争者:沃尔沃-Autoliv-爱立信-Zenuity、PSA、Navya、百度-北汽、捷豹路虎、丰田、现代
挑战者:Uber、特斯拉、本田和苹果
通用汽车公司以10亿美元的价格收购了位于旧金山的一家名为Cruise Automation的小型软件公司(致力于研发无人驾驶技术),将利用这次收购将补足自己在无人驾驶上的技术空缺,从而将帮助通用在无人驾驶汽车领域中赢得一席之地。通用汽车给予Cruise CEO Kyle Vogt足够的自主能力和影响力,不仅能保持原有的独立的运作机制,也能轻松获得汽车设计和底层架构,Cruise的工程师可以与通用工程师密切合作,通用汽车向联邦政府请求批准,明年开始生产没有方向盘或踏板的改装Bolt。按照未来的形态,基于Bolt的开发也是一个暂时的状态,最终的自动驾驶车辆将会以SAV的形式出现。如下图所示,是按照共享的运营模式,设计出来符合要求的电动车辆,从而把电动汽车与自动驾驶,充分发挥运营模式的优势。

我们通过通用汽车发布的《2018SELF-DRIVING SAFETY REPORT》梳理一下在GM当下对于自动驾驶的一些安全设计核心考虑。这个车辆是考虑没有驾驶员也能安全运行的理念,充分在设计、开发、制造、测试和验证的各个环节考虑安全性。自动驾驶系统是从开发初期就整合进车辆,再加上与软硬件团队的紧密合作,通用已经完成了所有的系统潜在故障模式评估,并一一解决了这些问题,以保障车辆的安全可靠。
首先我们看到的是车辆的传感器系统
为了实现“感知”功能,装了
1)5 台激光雷达:激光雷达是最为关键的,5个激光雷达都配置在车顶上面。
2)16 个摄像头:这些密布的摄像头在车辆的不同位置获取不同角度的图像数据。这些图像数据是激光雷达的数据补充,也是重要的感知源。
3)21 个雷达:雷达是激光雷达的补充,利用毫米波雷达的数据,能看到低反射率的物体
关联雷达(ARTICULATING RADARS):前1侧2,用来检测前方和侧方的移动车辆,需要以较大的视野内检测运动的车辆
长距离雷达(LONG-RANGE RADARS):前2后2,共四个,用来检测前后方的车辆并且测量车辆的速度
短距离雷达SHORT-RANGE RADARS:前6后4一共10个,主要用来检测车辆附近的物体,主要是行人、自行车等比较重要的物体
这些传感器数据让车辆能识别复杂的环境。值得一提的是,通用用到的传感器能覆盖近程和远程,且有 360 度视角。两种传感器搭配使用,速度数据就不再是问题。
摄像头也是激光雷达的补充,因为它能测得物体发出或反射的光线强度,让“大脑”能获得更多物体细节,两者结合后车辆做决定就更有信心。空间和时间确定后,车辆就能规划路径。
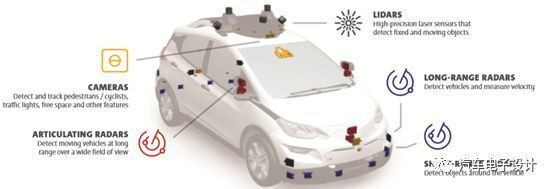
图 这台车辆(第三代)配置了各种各样的感知传感器系统,覆盖外部周围 360 度
自动驾驶运算平台:计算“大脑”
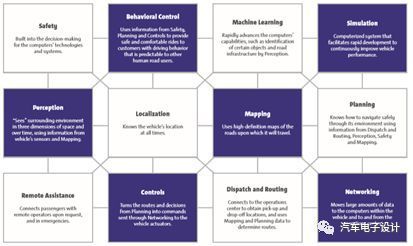
自动驾驶关键在于计算“大脑”,计算平台让车辆能掌握周围世界的情况并作出安全的驾驶规划。单一技术不能让“大脑”顺利转起来,是各种尖端技术的结晶,包括行为控制、机器学习、模拟、感知、定位、地图、规划、路线分配和网络等技术。感知、规划和控制,是车辆感知周边环境并在驾驶中做决定的关键支柱。
感知利用传感器监控周围环境并搭建一个 3D 模型。传感器负责将信息输入计算平台,进行算法运算探测并对物体进行分类,确定外部环境内的物体的位置、速度和方向
规划会决定车辆的行为,会参考道路交通法规为车辆制定形式路径,给自己找到适合行车的路径。在这个系统里面也会设计可行驶的区域,对区域进行分类,使得自动驾驶系统不会开着车辆去无法驾驭的区域和路线。规划的过程是基于车辆位置、其他车道上车辆的预计动作、交通管理、道路标识和交通法规等外部因素做出的。会对多条道路进行分析并根据当时情况做出最佳决定,如果发生意外的情况,在决策中调取备用方案。
控制则负责执行“规划”的命令,控制转向系统、油门、刹车和动力系统的运作。控制功能是建立在车辆原有的车辆稳定、牵引力和防抱死系统,可以根据上层的规划完成实际可行的规避动作。
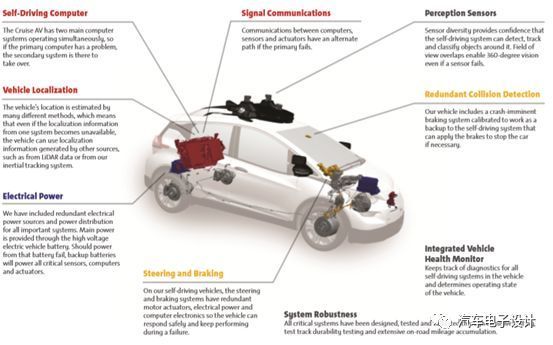
通用的系统安全项目整合了业内通行的工程标准、多年的造车经验和许多来自其他行业(航空航天、制药和国防)的苛刻标准。自动驾驶汽车需要的系统多样性、稳健性和冗余与航空和航天是有一定相似性。系统安全流程有两个关键部分,迭代设计的安全和综合风控与深度整合的安全。
两套同时工作的计算系统:专注于提升系统的能力,让它掌握车辆的完整控制权,包括加速、刹车、转向和决定等。运算系统有全面的诊断和分析,确定潜在的安全风险和挑战并找出相应对策。
两套供电系统:设计两套从高压电池转换的供电系统,并且配置了额外的冗余的电池供给核心的传感器。
信号传输系统:两套计算系统、关键传感器和执行器的通信采用了额外的冗余路径
冗余的碰撞执行:主要是刹车方面采用了两套执行的方式,可能是前后刹车独立控制,以保证车辆的可控性。
车辆定位:采用多种方法来实现对于车辆的位置确定,这个主要是核心的基础。
对于通用汽车来来说,之前花了很多的资金来收购Cruiseautomation,然后配置相应的电动汽车的工程团队对接,然后密歇根Orion的装配厂采用量产工艺制造自动驾驶汽车的公司。130辆搭载新一代自动驾驶技术的测试车在底特律附近的组装厂实现大规模量产,加入原先由50辆自动驾驶汽车组成的测试车队,在旧金山、亚利桑那州斯科茨代尔和密歇根州底特律市三地开展公共道路测试。
第二部分 Super Cruise
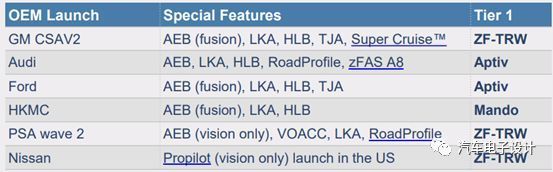
严格来说,通用的辅助驾驶原有的工程团队是采用渐进式路径进行开发的,在之前的积累上,开发了L2级别的驾驶辅助系统(Super Cruise超级巡航——,已经在搭载到了在北美上市的2018款凯迪拉克CT6之上。

备注:在自身的体系下,当时叫的是CSAV2, Comprehensive Safetyand Adaptive Vehicle 2
Super Cruise是由自适应巡航系统、蓝线保持系统、以及驾驶员注意力保持系统三部分构成。
1、自适应巡航系统:通过毫米波雷达监测前方车辆,以保证在一个安全的车速内行驶。这是一套全速域的ACC系统,工作时速为0-89英里/时(0-144公里/时),也就是说即使前方车辆停下来再起步,Super Cruise也可以不中断跟车并且无需手动干预。
2、驾驶员注意力保持系统:通过车内方向盘附近的微型摄像头与红外传感器实时监测驾驶员视线是否保持在路面上。
3、蓝线车道中央保持系统:前视摄像头和两侧的环视摄像头主要用于识别左右两侧道路标识、判断车道中央位置及朝向。通过高精度地图提供的道路曲率数据、车道编号、上/下匝道及其它道路属性信息,高精度GPS用于定位、获得沿道路纵向偏移距离并判断车辆所在车道。整合信息后可形成一个沿车道中央的虚拟车辆控制路径(车辆可自动行驶路线)
在这个过程里面,需要提前与地图供应商合作,通过激光雷达绘制了高速公路地图,以此为Super Cruise的开启设立了一个地理围栏。当系统判定当前处于有效区域,车辆位于车道中央,且传感器可以正常工作时,仪表盘上便会出现一个白色的Super Cruise专属图标,表明超级巡航处于待机状态,此时摁下方向盘上的超级巡航按钮,功能便会正式开启,仪表盘上的图标也会随之变成绿色,驾驶员双手双脚可以离开方向盘和油门刹车。


功能使用中,当系统通过红外检测到车主有分心状态,或者在系统判断外部环境超过设置阈值的时候(车道线不清昕,GPS信号弱等)系统会提示驾驶员马上接管车辆。
一级预警在5秒钟之内得不到反馈时,系统会自动进入二级预警
绿色闪烁变成红灯闪烁的同时,会伴有警报声或者座椅震动
如果10秒钟之内,驾驶者仍然没有将手放到方向盘上,则进入三级预警,Onstar后台话务员将会接入,Super Cruise功能被停止
如果三级预警下驾驶员仍然没有将手放到方向盘上,系统会判定车辆已经处于失控状态,会自行刹车停止在当前车道上
从这个层面来看,这个功能是在原有TJA的基础上,优化的更好一些,在高速段开启。比起Audi的zFAS而言,宣传上要弱化一些,体验上确实是类似的。
从某种程度上,这个比Autopilot从滥用上极大的杜绝使用,能在部分路段上给车主提供帮助,其实国内的高速环境比较奇特。使用起来限制比较多,我个人以为通往自动驾驶的路,两方面都要走,其内部的有关于安全机制的考虑是相似的。
这里采用了相似的DV验证来对自动驾驶系统进行验证,并实施了系统安全的分析方法,来构建与原有车辆系统兼容的安全设计理念。
两者都需要从车辆远程控制和系统总线的角度考虑的,由于整个联网的特性需求,使得车辆和后台是紧密联系起来,也增大了系统的信息安全的难度。从电气架构上,Cruise走的更基金一些,如大量的通信、电气和接口连接线束从车辆下部连接到了顶部的信息感知系统上,而车厢后部的计算系统则是整个自动驾驶车辆的核心区域。原有的Onstar车联系统就完全不够用了,特别是之前的计算系统的原始数据采集,所以采用了独立的数据收集系统,达到了200MB/s的存储和收集的能力,当然也构建了从原有Onstar获取车辆原有总线信息的能力。如下图所示,通过这些数据可以还原整个感知场景和车辆的运行情况。
小结:未来的车企,势必面临转型,特别是当新车战略慢慢行不通的时候,就需要在就有的商业模式和新的商业模式上都下功夫。
来源:汽车电子设计
本文地址:https://www.d1ev.com/news/jishu/69587
以上内容转载自汽车电子设计,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号