让我们先来做一道选择题。
司机老王开着一辆带有自动驾驶系统的车,这时道路前方突然出现了一个行人,可怕的是刹车失灵了。如果及时左转,老王的车就不会撞人;如果依旧直行,老王的车会将人撞死。
你觉得以下哪种情景,老王要为行人之死负责?
A、老王决定左转,而自动驾驶系统强制选择了直行(撞人)
B、老王决定直行(撞人),而自动驾驶系统没有干预
C、自动驾驶系统决定左转,而老王强制选择了直行(撞人)
D、自动驾驶系统决定直行(撞人),而老王没有干预
A和C选项中,人类和机器驾驶员都进行了错误干预。B和D选项中,两者都没有进行有效干预(错过干预)。到底谁的责任更大?
为无人车事故定责不是个简单的选择题。
MIT、哈佛、加州大学尔湾分校、法国图卢兹大学的一个联合研究小组致力于通过定量研究的手段了解人们在面对无人车事故时的态度,并于最近发布了研究成果。
论文作者来自脑和认知科学、心理学、经济学等多个不同领域,MIT火爆的无人车课程讲师Sydney Levine也是作者之一。
先说MIT联合研究小组通过向2583个人发放3次调查问卷得出的结论:
进行了错误干预的驾驶者是过失方,无论是人还是机器驾驶;
如果人机同时错过有效干预,舆论对机器更包容,人类司机的疏忽更受关注。
伴随着一个个无人车路测的消息,我们也看到了一起起事故。
3月18日美国亚利桑那州发生的Uber无人车撞伤行人并致死事故可以理解为“错过干预”。车祸正式报告还未公布,但据外媒报道,事故发生时车辆已经检测到车头前的行人,但决策系统却“决定”不采取任何闪避措施,同时人类安全驾驶员也未能及时作出反应。
Uber之后,3月23日,特斯拉Autopilot再次成为漩涡中心:一辆开启了Autopilot的Model X在高速上撞向隔离带,导致车主不幸丧生,还引发车辆起火和两车追尾。
对此,特斯拉表示:“司机已收到过几次警告,包括可视警告和声音警告。在碰撞发生前的6秒钟,司机都没有手握方向盘。事故发生前,司机有大约5秒钟的时间和150米的无障碍视野,但车辆记录显示司机没有做出任何动作。”同样,可以理解为“错过干预”。
历史总是惊人地相似。
2016年5月,全球首例引起广泛关注的Autopilot致死事故在佛罗里达发生,一辆特斯拉Model S在使用Autopilot模式行驶途中与一辆正在转弯的卡车相撞,导致特斯拉车主死亡。
特斯拉解释说:“在强烈的日照条件下,驾驶员和自动驾驶系统都未能注意到卡车的白色车身,所以没有及时启动刹车系统。”
也就是说,在这场事故中,无论是机器驾驶员还是人类驾驶员都应该采取措施(避开正在左转的卡车),然而他们并没有采取行动。人类和机器驾驶员的“错过干预”导致了撞车事故。美国高速公路安全管理局等部门在经过6个月的调查后,认定特斯拉Autopilot系统不存在缺陷。
据世界卫生组织统计,全球每年约有125万人死于车祸。通常,法律裁决的重点是判定谁是过失方,谁为事故承担责任。
随着半自动驾驶和全自动驾驶技术趋于成熟,如何公正判决谁应该承担责任就成了法官和陪审团的难题,因为事故中的过失和责任将由人类和机器驾驶员共同承担。
法官和陪审团都是人类。他们会偏袒自己的同胞吗?还是认为人类因为智力更胜一筹所以应当承担更多责任?
在2016年的特斯拉Autopilot事故中,公众明显偏向于指责事故中疏忽的人类驾驶员,比如有传闻说车主当时正在看哈利·波特电影(尽管没有任何证据证实这点)。
舆论对自动驾驶产业有直接的影响。
目前,公众对混合驾驶模式造成的车祸态度仍不明确,制造商也无法判断他们的责任范围,这直接反映在了无人车高昂的定价上,也减缓了无人车普及的速度。如果公众倾向于将责任归咎于人类驾驶员而不是机器,这将导致法律体系建设的放缓和监管的缺失,也无法给制造商施加足够的压力来提升无人车安全性。
MIT联合研究小组呼吁,为事故明确定责,是完善监管、促进自动驾驶行业发展的第一步。
目前,自动驾驶技术以混合驾驶模式为主。一些自动驾驶系统可以越过司机的权限执行紧急操作(例如丰田的Guardian Angel)。其他半自动驾驶车辆可以完成大部分驾驶操作,同时要求司机不断监控情况并随时准备采取控制措施(例如特斯拉的Autopilot)。
这里,核心问题是:当一辆半自动驾驶的汽车发生事故并造成人员伤亡时,如何判定人类和机器驾驶员之间的过失和因果责任?
让我们详细看看MIT联合研究小组的结论。
他们研究了6种驾驶模式,分别是单人驾驶模式、单机驾驶模式(全自动驾驶汽车)以及双驾驶员(两个人类或两个机器)的不同组合模式。这些模式分别对应无人车的6个等级,从L0到L5。比较典型的是,L2级的丰田Guardian Angel被归类为H-M模式,即人类(H)是主驾驶,机器(M)是副驾驶;L3级的特斯拉Autopilot被归类为M-H模式,即机器是主驾驶,人类是副驾驶。
焦点在于H-M和M-H模式下的两个场景:
主驾驶做出正确判断,而副驾驶错误干预(“错误干预”)
主驾驶做出错误判断,而副驾驶没有进行干预(“错过干预”)
研究人员使用了两个自变量做回归:驾驶员是否犯错、驾驶员类型(人或机器)。
在“错误干预”场景下,最重要的发现是:驾驶员是否犯错对评分具有显著影响,而驾驶员类型对结果的影响并不明显。可以从下图左边看到,做出错误干预的副驾驶被认为过失更大,而且副驾驶是蓝色(机器)或红色(人类)的情况下过失及责任分数接近。
也就是说,人们普遍认为,做出错误判断的一方是过失方。如果“错误干预”的驾驶操作导致行人死亡,那么无论做出误判的是人还是机器,都应当承担更多责任。
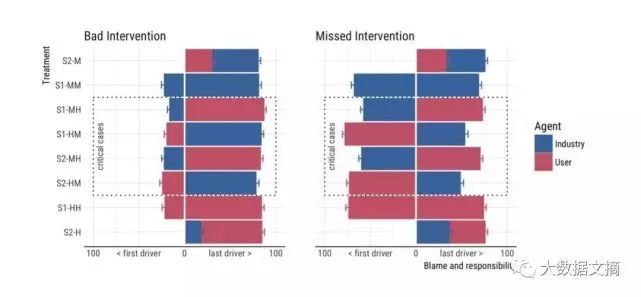
不同驾驶模式的过失及责任评估分数(分数越高责任越大)。蓝色代表车辆本身和汽车制造商的叠加责任分数,红色代表人类司机的责任分数。x轴标签first driver指主驾驶,last driver指副驾驶。
而有关“错过干预”的研究结果和此前的结果不同。
此前的研究表明,当机器和人类都做出错误的判断时,机器会受到更多的指责。而且,当人和算法犯了同样的错误时,人们对算法失去信任的速度要快于人类本身。
这次的结论是,如果发生“错过干预”的情况(即人类犯错机器没有干预,或者机器犯错人类没有干预),机器责任程度明显小于人类。
在双驾驶员模式下,人类和机器驾驶员都承担责任(缺乏有效干预),但是可以明显看出红蓝两色的差距。作为对照,如果主驾驶和副驾驶都是人类或者都是机器,他们的责任分数相同(对应上图右第2行及第7行)。
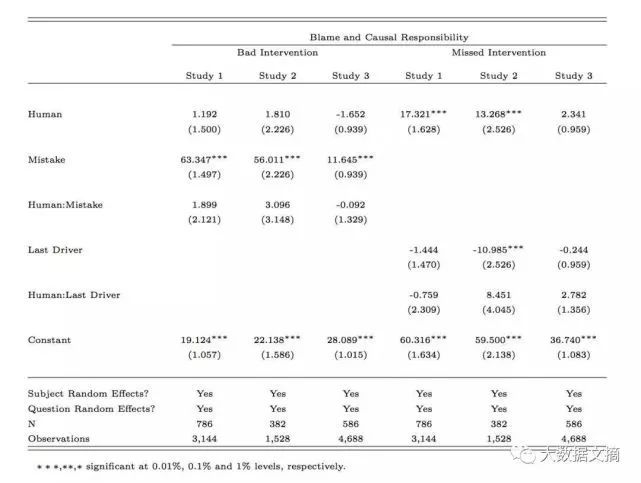
具体回归结果可以看这张图:
尽管人们对无人车的普及可能存在着许多心理上的障碍,但这一结果表明,公众不会对混合驾驶模式下的事故做出过度反应。尽管在研究中进行了一些系统的简化,但结果也能反映出一定的公众言论效应。公众倾向于将注意力集中在人类驾驶员的极度疏忽上,因此将责任归咎于人类驾驶员而不是机器。
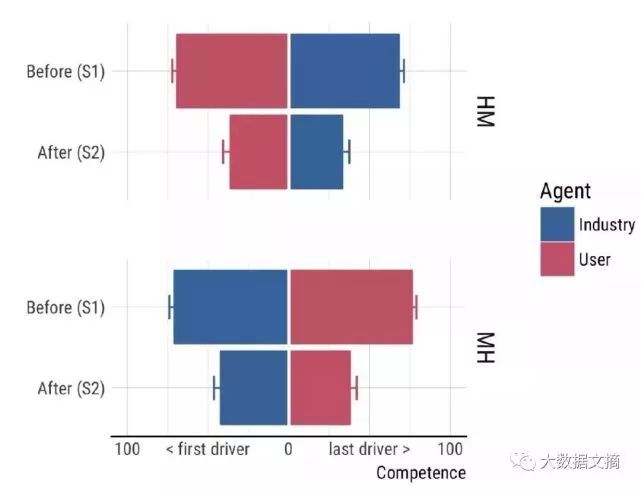
受访者也对人类和机器驾驶员的能力分别做了评估,结果相近。在了解事故前,受访者对人类和机器的驾驶能力同样有信心。在被告知发生了“错过干预”的事故后,信心同比例下降。
事实上,更应该关心的也许是公众的反应不足(under-reaction)。
研究人员认为,公众的反应不足会导致驱动监管法案制定的舆论压力缺失。如果半自动驾驶汽车的监管法案在有陪审团的法庭上制定,陪审团的裁决会偏向于汽车制造商,使其在人机共同犯错的案例中免责。这样的话,就无法给制造商施加足够的压力来改善汽车的安全性能设计。
其实,我们之前也经历过类似的情况。在20世纪60年代之前,汽车制造商将伤害事故责任归咎于驾驶员的错误或疏忽,从而逍遥法外。为此,很有必要通过自上而下的监管,将“事故责任制”的概念引入法律体系,即汽车的设计应尽可能减少发生事故时对乘客造成的伤害。
只有在法律约束下,汽车制造商才能被迫改进他们的设计。然而,安全的标准究竟如何,仍然是一个悬而未决的问题。
研究人员指出,仅仅在一种条件下,公众有可能产生过度反应,机器受到的责备会大于人类:机器做出了“错误干预”。
在这种驾驶模式中,人类并没有义务去纠正机器犯的错误。也就是说,机器的工作是纠正人类可能犯下的错误,但如果机器犯了错误,人类没有纠正的义务。(仅在“H-M”模式下如此。“M-H”模式下,当机器发生故障时,纠正故障始终是人类的责任。)
因此,一旦发生由“错误干预”造成的事故,可能会引起公众的广泛关注。如果我们对此不加以适当的预测和管理,那么全自动驾驶技术的进程可能会减缓。在研发机器比人类具有更大权限的汽车时,制造商们应该关注这类极端情况,因为在该情况下,机器比人类更易受到指责。
公众反应和舆论压力会影响判决和立法,也会影响个体的决策。
比如,人们可能会选择“能承担事故责任和舆论压力”的驾驶系统。更糟糕的是,人们可能会改变驾驶习惯,尽量让机器成为过失方(比如说,不去纠正机器的“错误干预”)。
毕竟,如果什么都不做,可以让机器背锅。
来源:亿欧
本文地址:https://www.d1ev.com/news/jishu/68722
以上内容转载自亿欧,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号