要说2018年自动驾驶领域的趋势,应该是越来越多的驾驶辅助系统开始进入我们的生活。
比如2018款凯迪拉克CT6搭载的Super Cruise超级巡航。这是通用在渐进式发展路线上第一个投入市场的L2自动驾驶系统,可以让你在高速公路放开双手双脚,由车辆自己在单车道内驾驶。
还有一个代表是特斯拉的Autopilot。这款系统进入市场的时间更早,开启场景主要也是高速公路,搭载系统的车辆可以保持在车道内行驶并应对不同状况,在一定程度上解放了司机。马斯克2号的时候还在预告,最新一版升级已经进入了最后测试阶段。
因为两套系统同属SAE L2,因此很多人好奇Super Cruise和Autopilot到底有什么不同,所以就有了这篇文章的对比。
开始之前,我们先做一些说明。
第一,和Super Cruise一步到位的思路不同,特斯拉采用的是预装硬件系统,之后OTA更新的方式获得越来越多的高级功能,因此我们每隔一段时间看到的Autopilot都不一样。目前特斯拉已经公布了Autopilot1.0、Autopilot2.0和Autopilot2.5多个版本的信息。这为车云菌的比较分析带来了一些难度。
从Autopilot1.0到Autopilot2.0升级中,硬件软件上都有不小变化,为了了解两款系统的迭代思路,车云菌选择摘取Super Cruise与Autopilot1.0、Autopilot2.0增强自动辅助驾驶选装包(截至2018年2月5日实现的功能)进行横向比较,同时兼顾两家公司整体的自动驾驶发展策略分析。
第二,比较维度。SAE J3016自动驾驶分级为比较同级别系统给出的一些参考维度。另外,自动驾驶系统往往分为硬件和软件部分。硬件部分包括传感器配置、计算平台,执行机构,软件部分包括定位策略和决策控制算法,都会用在这次对比中。
建立在上面的基础上,我们做了这个表格,接着车云菌会做一些详细分析。
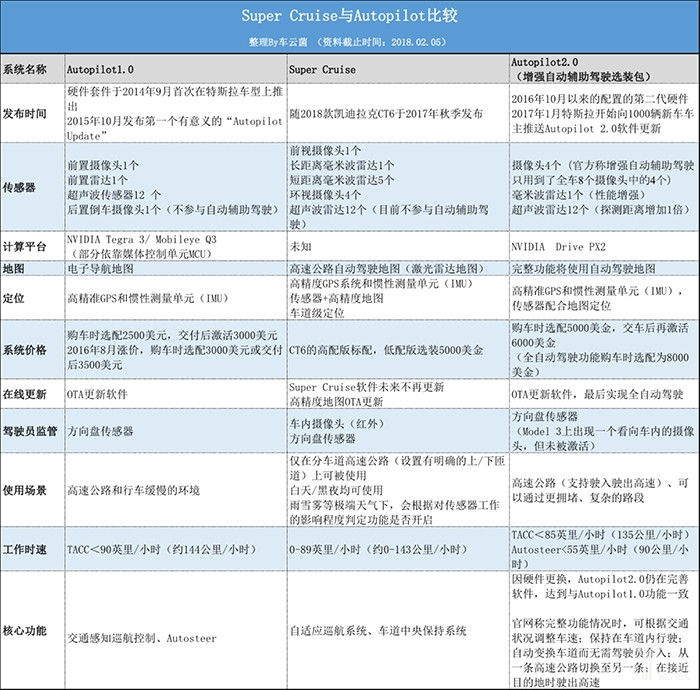
(Super Cruise和Autopilot的比较)
大家在了解自动驾驶汽车时,都会用SAE的分级来帮助大概了解系统水平。但实际上,SAE J3016也对了解同级别系统的细节,提供了比较的方法。其中比较重要的三个参数是设计运行范围(ODD)、动态驾驶任务(DDT)和动态驾驶任务支援(DDTFallback)。
1.设计运行范围(ODD)
可以理解成自动驾驶汽车安全工作的环境,包括车辆自动驾驶时的Speed速度(高速、低速等)、Geography地形(平原、山地等)、Roadway路面情况(直路、弯路等)、Environmengt环境(天气、气候、基础设施等)、Traffic交通情况(简单、复杂、违规行为、路线固定等)、Temporal时段(白天、晚上)……
两个系统都十分依赖车道线。Super Cruise仅在分车道高速公路(设置有明确的上/下匝道)上可被使用,白天/黑夜均可使用,雨雪雾等极端天气下,会根据对传感器工作的影响程度判定功能是否开启。工作速度是0-89英里/小时(约0-143公里/小时)。
虽然很多粉丝在城市环境试过Autopilot,但特斯拉官方给出的启用范围依然是高速公路和行车缓慢的路段。在Autopilot1.0时,速度被限定在90英里/小时(约144公里/小时)以内。Autopilot2.0还在用新硬件实现Autopilot1.0的功能,为此特斯拉一直在对限速进行调整。
2.动态驾驶任务(DDT)
在道路上驾驶车辆需要做哪些操作和决策,包括通过方向盘来对车辆进行横向运动操作、通过加速和减速来对车辆纵向运动方向操作、通过对物体和事件检测、认知归类和后续响应,达到对车辆周围环境的监测和执行对应操作、车辆运动的计划还有对外的传递信息。
对于动态驾驶任务方面,Super Cruise和Autopilot在纵向控制方面,ACC都能以非跟车和跟车的形式开启系统。有明显差异的是变道。Super Cruise是一个单车道L2自动驾驶系统。如果你需要变道,就拨动转向拨杆后,自行观察周围情况、控制方向盘变道,完成变道操作后,系统会自动运行。
Autopilot系统开启时,为了改变车道,驾驶员必须首先在视觉上确认这是安全的,就像他在手动驾驶时一样。然后,他必须在握住方向盘的情况下通过启动转向信号来表示改变车道的意图。车辆自己会响应驾驶员的命令换道。
值得注意的是,对于Autosteer功能,特斯拉表示横向控制还要谨慎使用,Autosteer还是Beta版本,还是会有一些未知的问题,用户需要选择性开启。
3.动态驾驶任务支援(DDTFallback)
是指自动驾驶系统在设计的时候,要考虑系统性的失效(导致系统不工作的故障)发生或者出现超过系统原有的运行设计范围之外的情况,这是系统怎么样给出最小化风险的路径。
在著名的致命事故之后,Autopilot为了防止驾驶员双手离开方向盘,会每隔一段时间提醒司机接管。当双手不对方向盘施加压力之后十几秒,系统先给出轻度提醒,如果驾驶员不予理会,提醒级别会升级,最终车辆会自动减速到停车,自动退出Autopilot模式。这时你必须置于停车状态才能重新启用它。
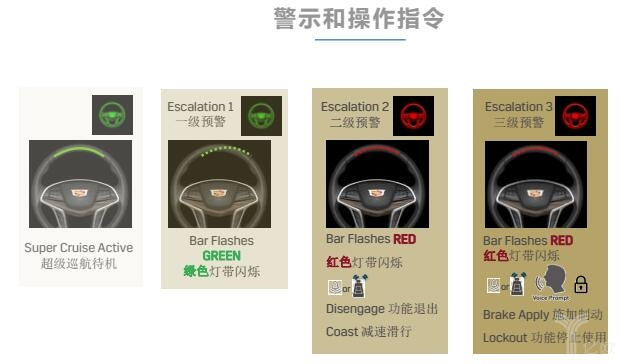
Super Cruise三级预警
对于Super Cruise来说,当驾驶员注意力保持系统监测到驾驶员有分心状态,或者驾驶环境超出了系统的掌控范围,比如说车道线不清昕,GPS信号弱等,系统会提示驾驶员马上接管车辆。
失效时会分为3级预警。一级预警在5秒钟之内得不到反馈时,系统会自动进入二级预警,绿色闪烁变成红灯闪烁的同时,会伴有警报声或者座椅震动(用户可以自行设置预警方式),如果10秒钟之内,驾驶者仍然没有将手放到方向盘上,则进入三级预警,安吉星后台话务员将会接入,Super Cruise功能被停止使用,仪表盘上的图标消失,再次使用需要停车重新点火启动车辆。当然,如果三级预警下驾驶员仍然没有将手放到方向盘上,系统会判定车辆已经处于失控状态,会自行刹车停止在当前车道上。
值得一提的是监管驾驶员的方式。特斯拉看住驾驶员的方法一直是靠的方向盘压力,于是出现了很多驾驶员用方向盘卡橙子、方向盘挂水瓶的方法,避免系统的“唠叨”。相比之下,Super Cruise已经解放了驾驶员双手,用带有红外的摄像头(可以在夜间监控人脸)监测驾驶员状态,在驾驶员注意力不在路面的时候提醒接管。
Autopilot似乎也已经意识到这个漏洞带来的安全隐患。有细心的人发现,在Model 3上开始出现一枚看向车内的摄像头,虽然尚未激活,但是特斯拉很可能也要借助车内摄像头来盯紧司机了。
先看硬件配置。据车云菌了解,Super Cruise和Autopilot主要的前向功能都是靠一个前视摄像头和前向毫米波雷达实现的。
有媒体报道称,即使是在Autopilot2.0(马斯克曾表示,Autopilot2.0的这套硬件装备是要实现全自动驾驶的)里,特斯拉使用的自主研发视觉系统有8个摄像头(因为之前与Mobileye的分手),但特斯拉一开始也只打算用1个前视摄像头和1个毫米波雷达来追平Autopilot1.0的功能,一些爱好者还用遮挡摄像头的方法测试过这一点。后来Autopilot2.0启用了三目中的另一个前向摄像头,可以在实现相同功能的同时,达到更好的决策效果。
不同之处在于,Super Cruise在车身一周的感知上,加入了更多的冗余,尽量保证一个方向有摄像头和毫米波雷达两种传感器。特斯拉在Autopilot2.0用上的四个摄像头应该是三目摄像头和一个后视摄像头,车身两侧没有形成“环视+超声波”的“双保险”。
在计算平台方面,我们没有获得CT6的详细信息。不过从Autopilot1.0到Autopilot2.0的变化,我们验证了一个趋势——Autopilot1.0的计算利用了一部分媒体控制单元的MCU,到Autopilot2.0就选用了专门的自动驾驶计算平台,包括最近传出特斯拉的硬件更新预告和自研片上系统传闻,都代表了随着自动驾驶发展,芯片需要重大升级,主机厂和芯片公司会越走越近。
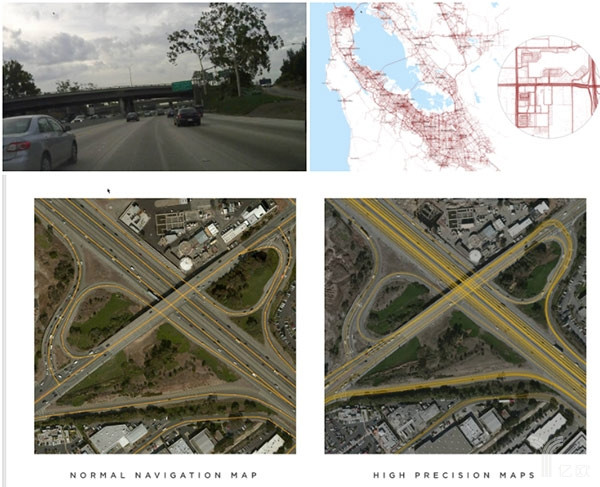
(Autopilot1.0发布时,就提到了高精度地图)
在导航方面,Super Cruise和Autopilot都使用了高精度GPS和惯性测量单元来帮助定位,Super Cruise的定位精度达到了车道线级别。双方明显的差异点在于地图。虽然马斯克在Autopilot1.0发布的国外记者会上表示,Autopilot会用到更高精度的自动驾驶地图来辅助导航,但是一些Bug和功能限制表明,Autopilot很可能还是用的普通电子导航地图。
Super Cruise已经率先用上了自动驾驶激光雷达地图,提供道路曲率数据、车道编号、上/下匝道及其它道路属性信息。通用每个季度都会通过OTA的方式更新自动驾驶地图数据。大家都知道高精度的地图是自动驾驶必不可少的工具,在驾驶辅助功能上用上高精度地图,Super Cruise在决策和控制方面起到的安全效果十分明显。比如在上下匝道时的安全保障,配合车辆的转向、刹车等控制系统,从而帮助车辆更好地进行预测、转向,实现安全控制。
而且据消息称,特斯拉在Autopilot2.0中会用上自动驾驶地图(合作伙伴很可能是Mapbox和Valhalla),目的是在完整版功能里,实现“从一条高速公路切换至另一条,在接近目的地时驶出高速”这两个动作。
另外软件算法方面,车云菌认为测试也是一个比较维度,因为茁壮的软件需要不同环境下的道路数据来喂养,这些数据就来自漫长的测试。
通用方面并没有表态是否对Super Cruise进行软件升级,只明确说明会进行自动驾驶地图的更新。但通用在全自动驾驶测试方面的投入巨大,是测试车队规模最大的主机厂之一。今年年初,通用正式发布第四代自动驾驶汽车,并向美国高速公路安全管理局(NHTSA)递交了申请,计划在2019年将这款自动驾驶车辆投入应用。届时通用就会在实际运行环境中收集数据,这种方式收集的数据会更有针对性,并且为商业化积累经验。
而特斯拉所有的存量车都会成为自动驾驶测试车,由于它拥有数目庞大的客户群,这个非自发组成的车队通过借助车内的“影子模式”来实现对自动驾驶技术的测试。在Autopilot1.0更新为Autopilot2.0时,特斯拉官宣已经累积了13亿英里的Autopilot1.0数据,“几乎所有”数据都对Autopilot2.0有用。
总体来看,Super Cruise在安全上考虑的更多一些,感知方面用了更多传感器和地图冗余来保证安全。Autopilot功能上更加丰富,马斯克不断用预告、更新的方式,以传统车企无法比拟的速度往前推进着Autopilot的升级,但用户使用仍待完善的Beta版本,一直是个争议话题。
如果只看当下,两家出身不同的公司,因为各不相同的DNA,产品上一个更保守,一个更激进。但看向未来,他们选择了不同的方法来实现自动驾驶的终极理想和阶段目标。
眼下的高低不是所有自动驾驶公司的最终目标,毕竟在技术没有全部实现之前,任何自动驾驶系统都只是过渡版本。
来源:亿欧
本文地址:https://www.d1ev.com/news/jishu/62396
以上内容转载自亿欧,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号